 为什么电流检测是协作式移动机器人的必备条件
为什么电流检测是协作式移动机器人的必备条件
机器人在制造和仓储设施中越来越普遍。工厂正在扩大移动机器人的使用,以帮助在没有人工交互的情况下自主将物品从A点移动到B点,同时还扩大了协作机器人的使用,以实现更高效的工作并减少工人疲劳。电流检测在移动机器人和协作机器人中起着至关重要的作用,有助于实现这些优势。
移动机器人通常在主电源轨上使用 48 V 至 80 V 的锂离子电池运行,并且可能会在主电源轨上遇到超过 150 A 的高浪涌电流。移动机器人上的辅助电源轨可以利用 3.3 V 至 80 V 之间的任何电压为照明、电机、视觉系统、CPU、内存和其他相关子系统等外围设备供电。次级电源轨上的电流水平通常要低得多,在数十安培的范围内。
另一方面,协作机器人通常在24 V至60 V之间工作。系统内的电流水平(特别是电动机中的电流)通常为每个节点约20 A或更低。精确的电流测量在协作机器人中更为重要,因为高精度提供了严格的系统控制,以实现机器人的安全高效操作。
电流检测在电机驱动相电流测量、电池管理系统和一般外设监控等用例的机器人系统中起着不可或缺的作用。
移动和协作机器人中的电机驱动
在电机控制应用中,电流检测IC现在具有一个前端,该前端利用了一种称为增强型脉宽调制(PWM)抑制的技术。该技术最大限度地减少了由开关共模电压信号引起的输出误差,这在在线相电流测量中非常常见。如 图1,它改善了电气特性,如失调、增益误差和温度漂移,从而实现了增强系统性能和超精确测量等优势。
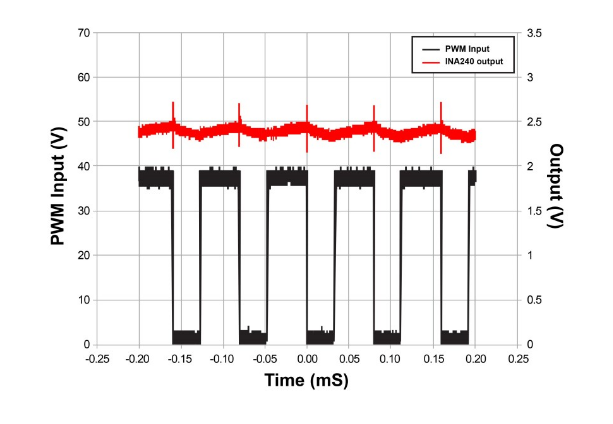
图1 PWM 抑制改善了失调、增益误差和温度漂移等电气特性。源: 德州仪器
更仔细地观察电机驱动器, 图2 显示了移动或协作机器人中三相电机系统中电流检测IC的五个潜在位置。从左上角开始是一个高侧直流母线,它与相位无关,可监控整个电机系统中的电流负载以及短路情况。随后的电流检测实现在每个相位的高端,监控进入电机每个相位的电流。监控每个相位使系统能够更好地检测哪个相位可能运行不正确。对于高端测量,电流检测IC通常具有最高的系统电压电平。
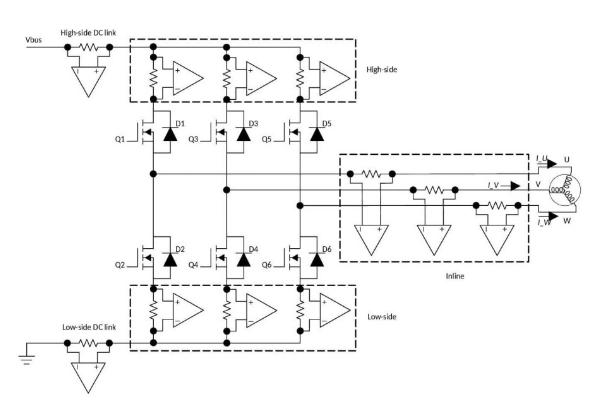
图2 以下是机器人系统中常用的电机电流检测方法的概要。来源:德州仪器
图2的中心是在线电流监控,它支持闭环反馈系统。控制器部分现在可以根据相电流水平控制系统,从而提供更严格的控制能力。直列电机电流检测的困难在于开关共模信号;然而,PWM抑制技术除了检测高达110 V的高共模电压外,还可以帮助减轻PWM信号可能产生的误差,类似于高端测量。这些特性使得在系统中实现这些IC变得更加容易,并通过实现更严格的系统控制来提高整体效率。
图2中的最后配置是低侧相位和低侧直流母线。低边测量通常在较低的电压电平下进行,因为IC靠近地电位;这些IC可以监视低侧电流。低侧监控可全面读取系统中的电流测量值;它还在负载后提供较低级别的保护和控制。可以在电机系统中使用这些配置中的一种或多种。
移动和协作机器人中的负载点检测
图3 展示了移动机器人系统如何监控外围设备,如照明、雷达、处理系统和其他相关子系统。通常,电源系统为次级电源轨和通道提供直流电源。电源被引导到 DC/DC 转换器,然后输送到负载开关,负载开关连接和断开负载与电源的连接,以在不需要外围设备时节省能源并提高效率。
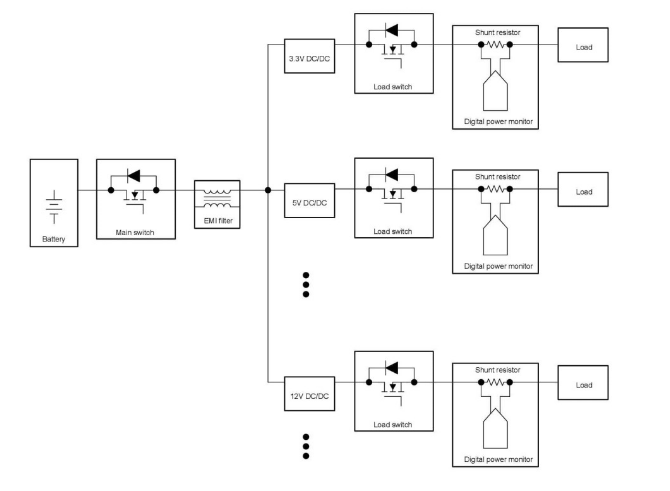
图3 以下是机器人系统中使用的负载点电流检测方法的广泛视图。来源:德州仪器
当开关使能时,电流检测IC监控通过开关的电流和电压,并通过I将电压、电流、功率和其他重要信息传输回微控制器2C. 此数据有助于确保系统的运行状况和峰值效率。您也可以在这里使用电流检测IC,但在大多数情况下需要更多的硬件,例如模数转换器(ADC)或微控制器上的通用输入/输出引脚。但是,在需要快速过流检测的特定情况下,电流检测IC具有1 μs比较器。
机器人安全趋势的新兴趋势
国际标准化组织(ISO)3961-4规定了无人驾驶移动机器人及其仓库机器人系统的安全要求,而ISO 15066规定了协作工业机器人系统及其工作环境的安全要求。ISO标准有所不同,因为移动机器人在仓库或区域周围移动的能力具有更大的自由度,这可能会导致机器人发生事故的可能性增加。
根据ISO标准,汽车电子委员会(AEC)-Q100 IC可以帮助确保最高的IC质量,并且这些IC生成的信息是可靠的。
在移动或协作机器人平台中利用电流检测可以提高安全性和效率,减少工人疲劳,并帮助监控系统运行状况。实现电流检测IC存在尺寸等挑战,但小外形晶体管(SOT)-23或SC-70封装有助于最大限度地减少尺寸限制。
使用电流检测 IC 可以通过实现严格的控制和运行状况监控来帮助设计人员增加增强的功能。电流检测正在不断扩展,随着技术的不断发展,电流检测的使用将变得越来越重要,因为更多的电子设备将需要监控。
-
电流检测
+关注
关注
13文章
458浏览量
40848 -
移动机器人
+关注
关注
2文章
736浏览量
33380 -
协作机器人
+关注
关注
2文章
471浏览量
29981
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论