 图解大模型训练之:Megatron源码解读2,模型并行
图解大模型训练之:Megatron源码解读2,模型并行
源码解读系列将和大家一起来读Megatron的pretrain部分代码。
在源码解读第一篇中,我们讲解了如何做「分布式环境初始化」,即按照DP/TP/PP对进程进行分组,并为每个进程指定GPU。在这一章中,我们将一起读「模型并行部分」:如何切分模型,并搬入分布式环境定义好的DP/TP/PP组中。
「本文将提供:」
- 详细的图解。画图说明代码的设计架构,讲清代码想做一件什么事。
- 详细的代码注释。在图解的基础上,提取核心代码部分,并附上注释。
「如何利用本文提高源码阅读效率:」
- 先看一~三部分。了解模型并行的设计思想、整体框架及入口函数。
- 打开Megatron源码,找到入口函数,开始阅读。
- 阅读中的每一块细节,可参考四~八部分。
「阅读本文前置知识:」
- 图解大模型训练之:张量模型并行,Megatron-LM
- 图解大模型训练之:Megatron源码解读1,分布式环境初始化
「本文目录:」
一、模型概述
二、模型切割在做一件什么事
- 2.1 模型切割设计思想
- 2.2 随机种子
三、模型并行框架
- 3.1 模型并行入口函数
- 3.2 定义并搬运模型
- 3.3 分布式模型:CodeGeeX
四、MegatronModule
五、Emebdding
六、VocabParallelEmebdding
七、ParallelSelfAttention:分布式block的一般套路
- 7.1 列切割:ColumnParallelLinear
- 7.2 行切割:RowParallelLinear
- 7.3 ParallelSelfAttention
八、CrossEntropy
- 8.1 计算logit
- 8.2 计算交叉熵
九、筋疲力尽的总结
十、参考(本文相关源码与论文)
一、模型概述
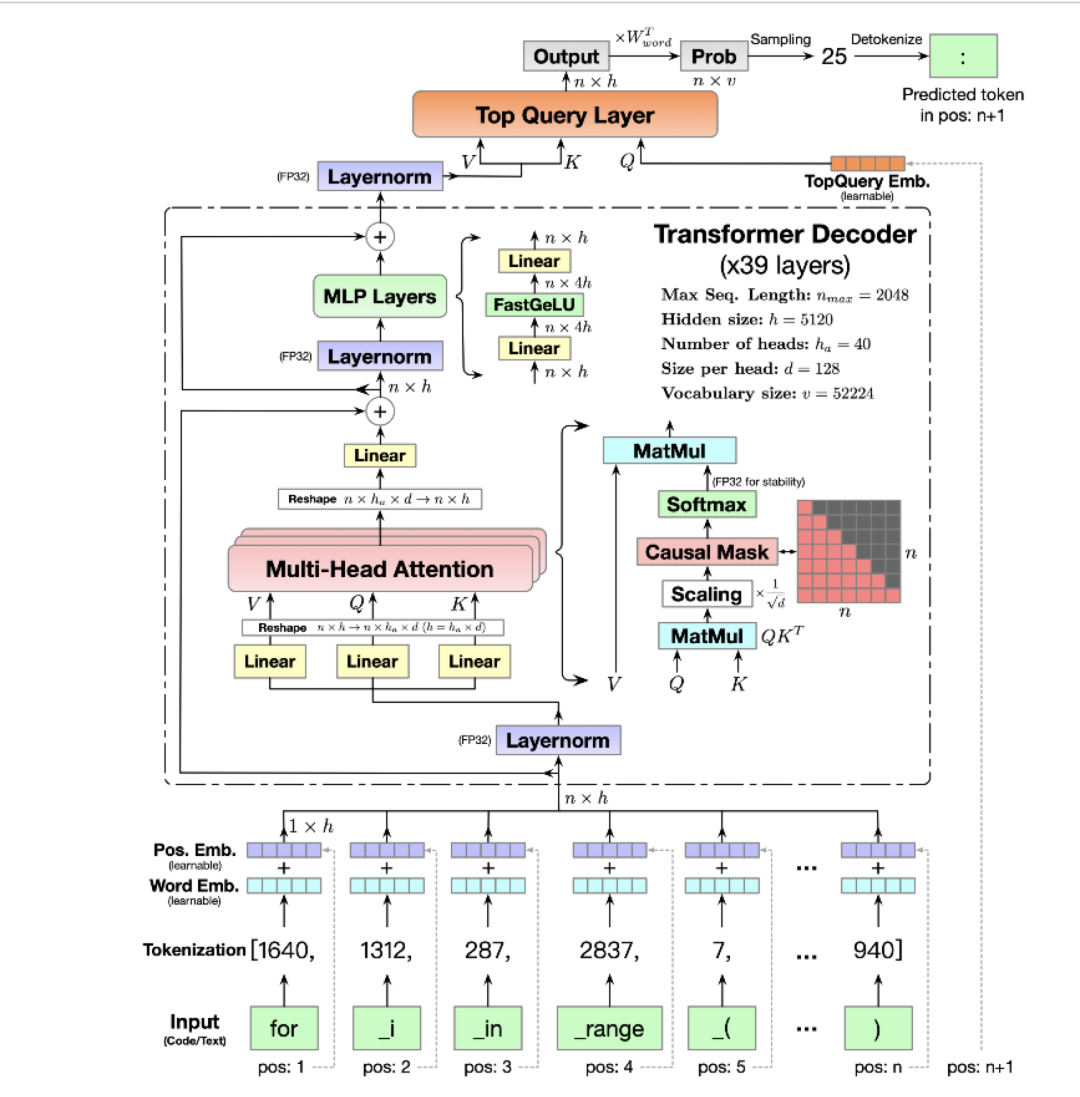
前文说过,用Megatron做分布式训练的开源大模型有很多,我们选用的是THUDM开源的CodeGeeX(代码生成式大模型,类比于openAI Codex)。选用它的原因是“完全开源”与“清晰的模型架构和预训练配置图”,能帮助我们高效阅读源码。我们再来回顾下这两张图。
「模型架构」
「预训练配置」
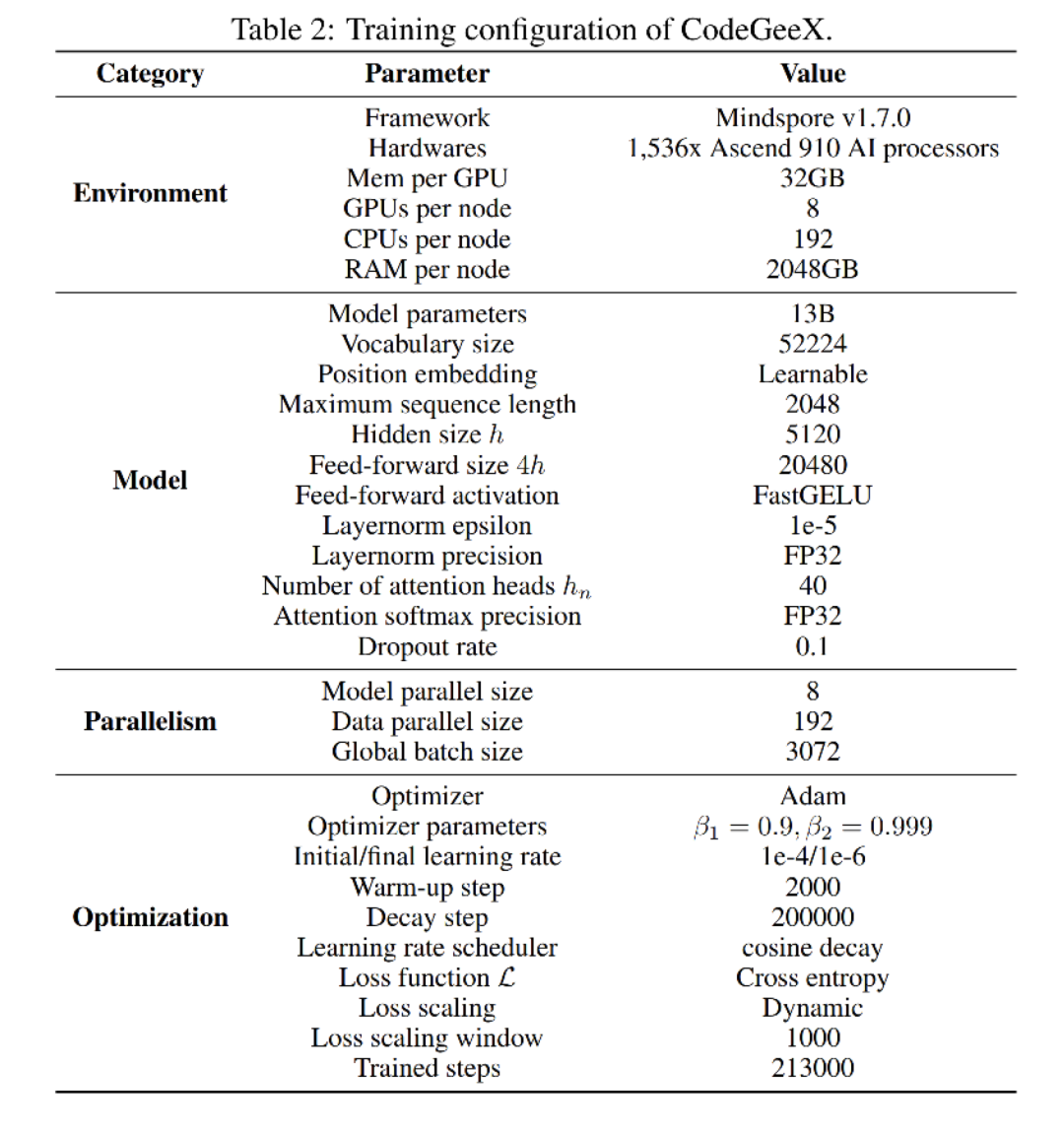
由图可知,CodeGeeX在预训练中采用的是8头TP(同一个node内的8张卡做TP,8张卡组成一个完整的模型),192头DP(192个node间做DP),一共1536块GPU进行训练。
「【阅读提醒】:如果你对GPT模型比较熟悉,则不需要花时间细看CodeGeeX架构图也能无障碍阅读本文。架构图只是在涉及模型细节时,可以对照着看。」
二、模型切割在做一件什么事
2.1 模型切割设计思想
回顾一下,在初始化分布式环境中,我们根据DP/TP/PP组设置并划分了进程,确定了模型的切割方法,如下图: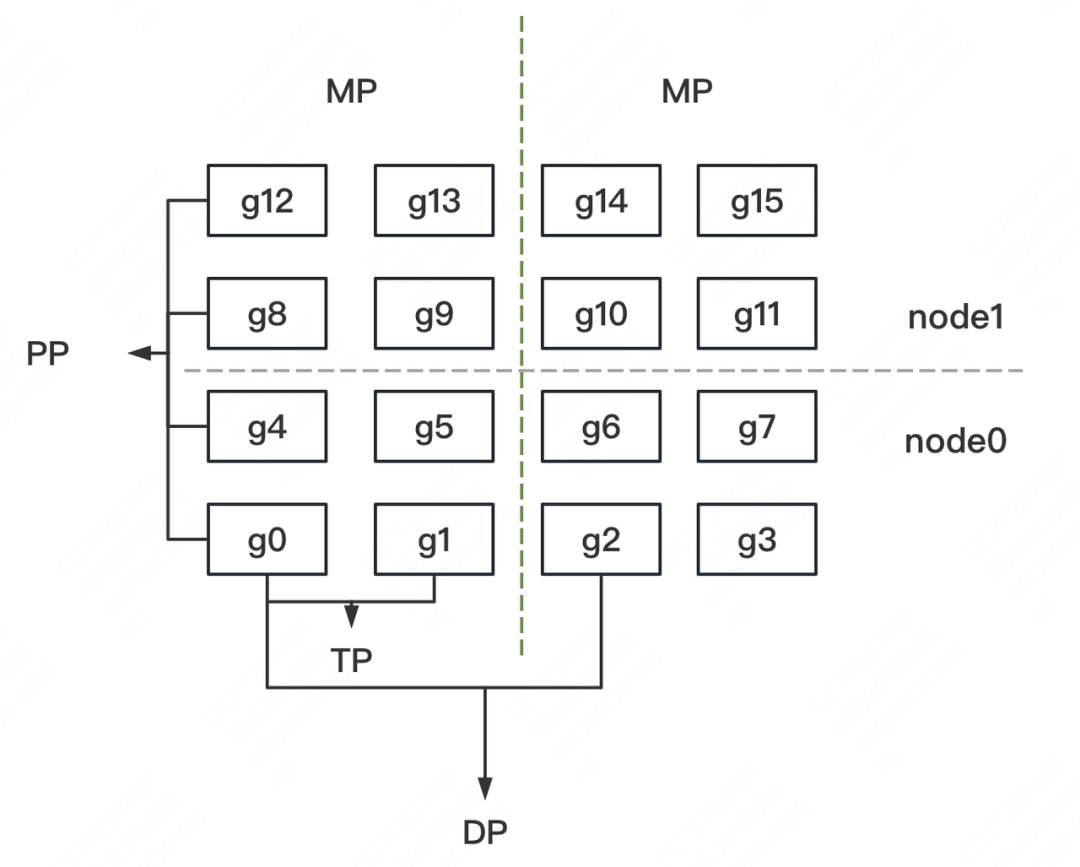 (注意:这并不是CodeGeeX的划分框架,而是一个更广义的例子,细节可阅读上篇讲解)
(注意:这并不是CodeGeeX的划分框架,而是一个更广义的例子,细节可阅读上篇讲解)
接下来,我们就可以根据这个框架来切割模型了。pytorch默认将模型(nn.Module)定义在CPU上,因此,我们在CPU上定义并初始化模型,然后将其搬运到当前进程所对应的GPU上,整个过程如下图: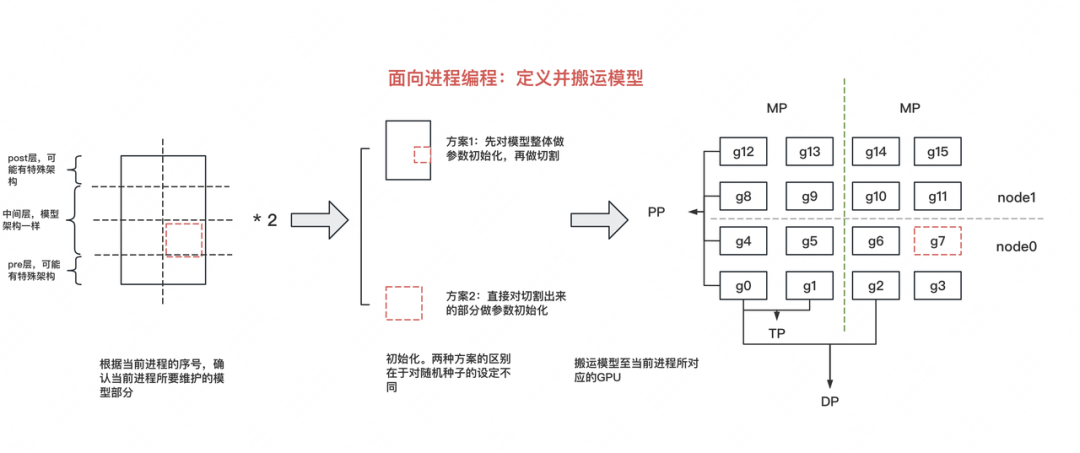 首先,我们是面向进程编程的,也就是整份脚本处理的是发生在1个进程上的事情。这样做的好处是,我们只需要维护1份脚本,然后将其发去不同机器的各张卡上执行,就能实现全局的并行。
首先,我们是面向进程编程的,也就是整份脚本处理的是发生在1个进程上的事情。这样做的好处是,我们只需要维护1份脚本,然后将其发去不同机器的各张卡上执行,就能实现全局的并行。
但是,1个进程处理的是模型的不同部分,比如GPT模型,它的pre层涉及到Embedding计算,post层涉及到softmax和loss的计算,这样每个进程上处理的模型是不一样的,这时怎么办呢?别忘了,我们能够取到进程id(全局或DP/TP/PP组内的),这样我们就能通过进程id,写if...else...来解决模型差异化问题了。
明确了这个思想,现在我们可以开始写代码了,我们有两种方式对模型进行切割:
- 「方案一:」先定义出完整的模型,并对模型参数做初始化,然后根据进程id取出相应子模型,搬运到GPU上
- 「方案二:」直接根据进程id,设计好当前子模型,做参数初始化,搬运到GPU上
这两者的核心差别,在于“随机种子”的设定。
2.2 随机种子
在分布式训练中,「随机种子是非常重要的,它关系到模型是否能够复现」。例如我们采取activation checkpoint的技术来节省显存时,在backward过程中我们需要重算forward得到activation,这时候就需要我们完整复现之前forward的过程,各类参数的初始化结果也要和之前完全一致。
我们来看几个例子:
例1: Word Embedding
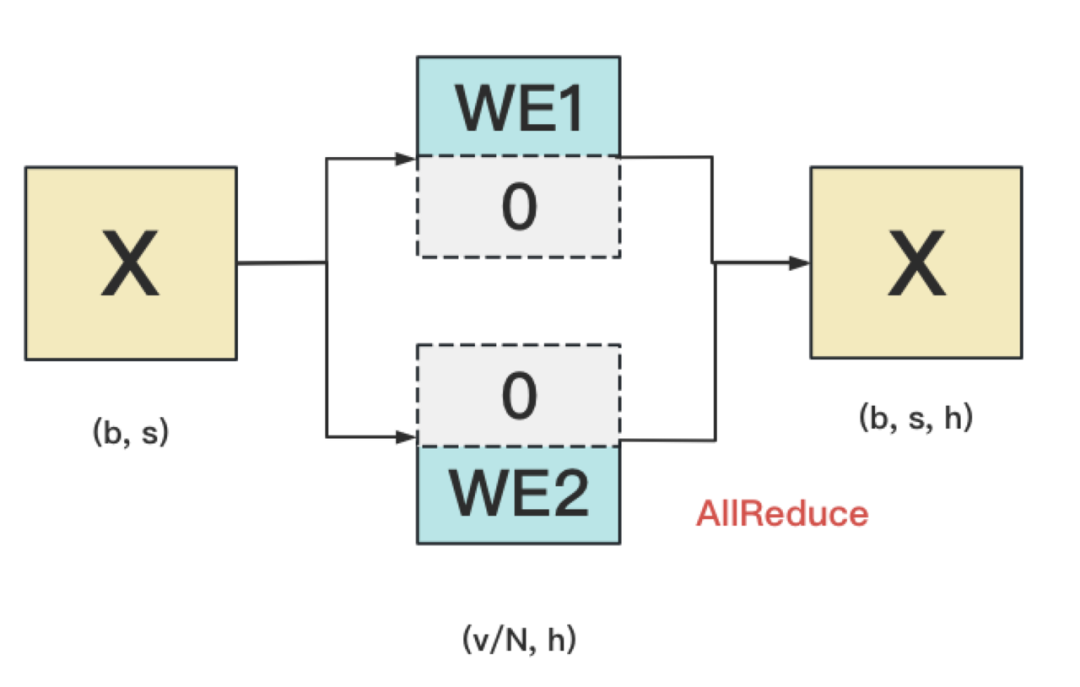 WE1和WE2间需要采用不同的随机种子。因为若采用相同的随机种子,则WE1和WE2的结果完全一样,这不等价于先随机初始化WE,再将它进行切割。
WE1和WE2间需要采用不同的随机种子。因为若采用相同的随机种子,则WE1和WE2的结果完全一样,这不等价于先随机初始化WE,再将它进行切割。
例2: dropout
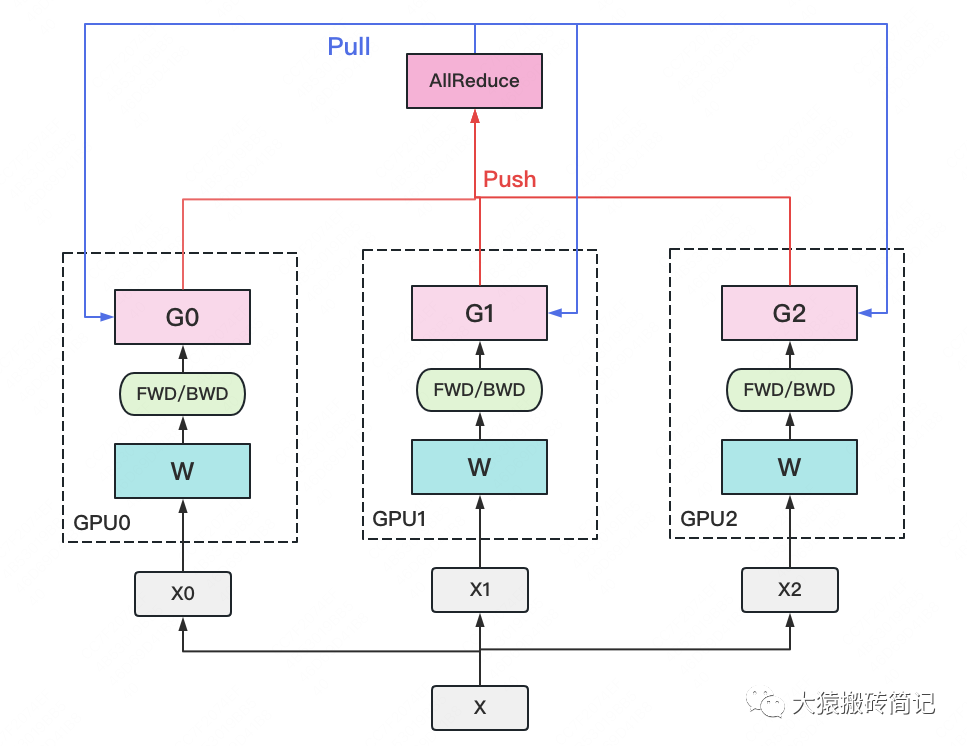
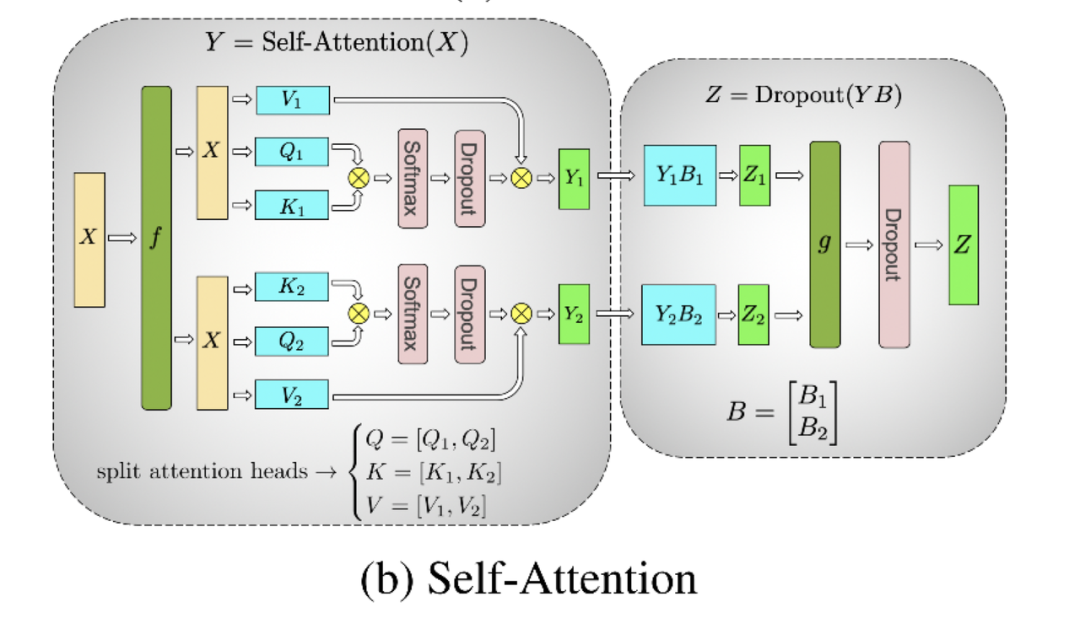 左侧方框中的2个dropout,在初始化时需要用不同的随机种子。因为这样才等价于对完整的dropout做初始化,然后再切割。右侧方框中的dropout,需要用相同的随机种子(虽然右边只画了1个dropout,但其实是2个dropout,每块GPU上各一个,因为此时两块GPU上的输出已经AllReduce,是完全一致的。做完AllReduce后,两块GPU继续独立计算,因此实际上有两个dropout)。
左侧方框中的2个dropout,在初始化时需要用不同的随机种子。因为这样才等价于对完整的dropout做初始化,然后再切割。右侧方框中的dropout,需要用相同的随机种子(虽然右边只画了1个dropout,但其实是2个dropout,每块GPU上各一个,因为此时两块GPU上的输出已经AllReduce,是完全一致的。做完AllReduce后,两块GPU继续独立计算,因此实际上有两个dropout)。
关于随机种子设定的一般结论
从例子中,我们可以得出一个结论:「一般在TP/PP组内,设定不同的随机种子。而在DP组内,设定相同的随机种子。」 这只是一个一般结论,我们可以根据实际情况去调整。
最后,回到模型切割上,方案1(先做整体初始化再切割)在代码里被称为“CPU上的初始化”(_initialize_affine_weight_cpu),方案2(直接对局部初始化)被称为“在GPU上的初始化”(_initialize_affine_weight_gpu)。我们会在切割部分的代码里经常看见它们。
三、模型并行框架
现在,我们可以来看具体的代码了
3.1 模型并行入口函数
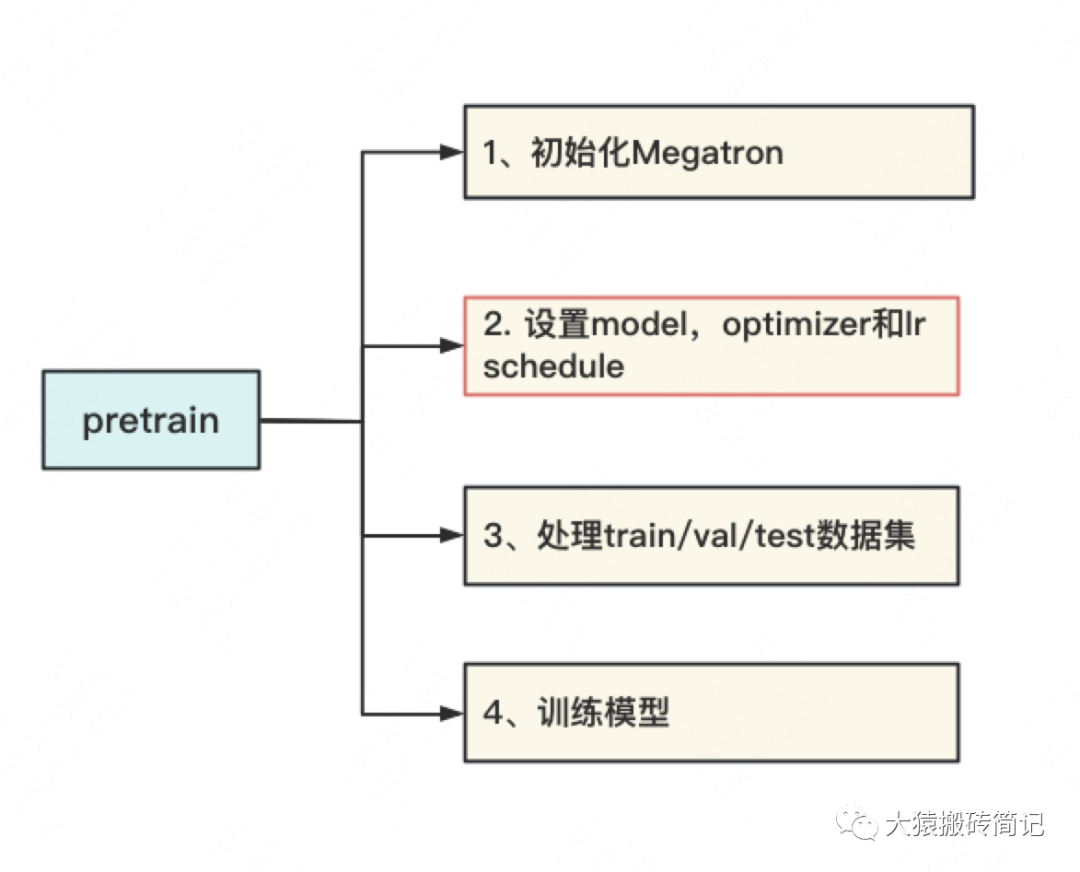
模型并行部分的代码入口依然在megatron/training.py的pretrain函数下,代码如下:
defpretrain(
train_valid_test_dataset_provider,
model_provider,
forward_step_func,
valid_forward_step_func=None,
extra_args_provider=None,
args_defaults={},
):
#1.初始化分布式环境(源码解读1内容)
initialize_megatron(
extra_args_provider=extra_args_provider,args_defaults=args_defaults
)
...
# 2、模型并行:定义模型架构,并切割模型(本文重点)
model,optimizer,lr_scheduler=setup_model_and_optimizer(model_provider)
...
#3、构造train/val/test数据集(下一篇将讲述)
...(
train_data_iterator,
valid_data_iterator,
test_data_iterator,
)=build_train_valid_test_data_iterators(train_valid_test_dataset_provider)
...
#4、训练(下下一篇将讲述)
iteration=train(
forward_step_func,
valid_forward_step_func,
model,
optimizer,
lr_scheduler,
train_data_iterator,
valid_data_iterator,
)
...
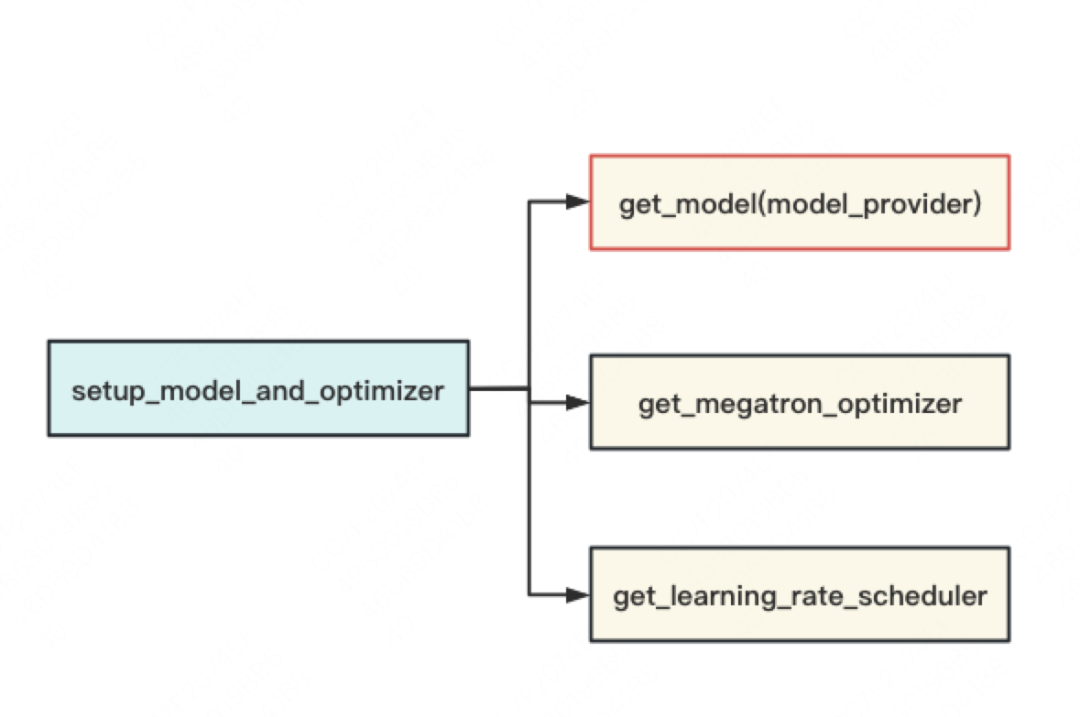
由代码可知,setup_model_and_optimizer是整个模型并行的入口函数,如下图,它主要由”「定义模型架构并切割模型」“,“「设置optimizer」”和“「设置学习率」”三部分组成。我们关注的重点在第一部分上(get_model)。
3.2 定义并搬运模型
get_model的内容可简化成下图:
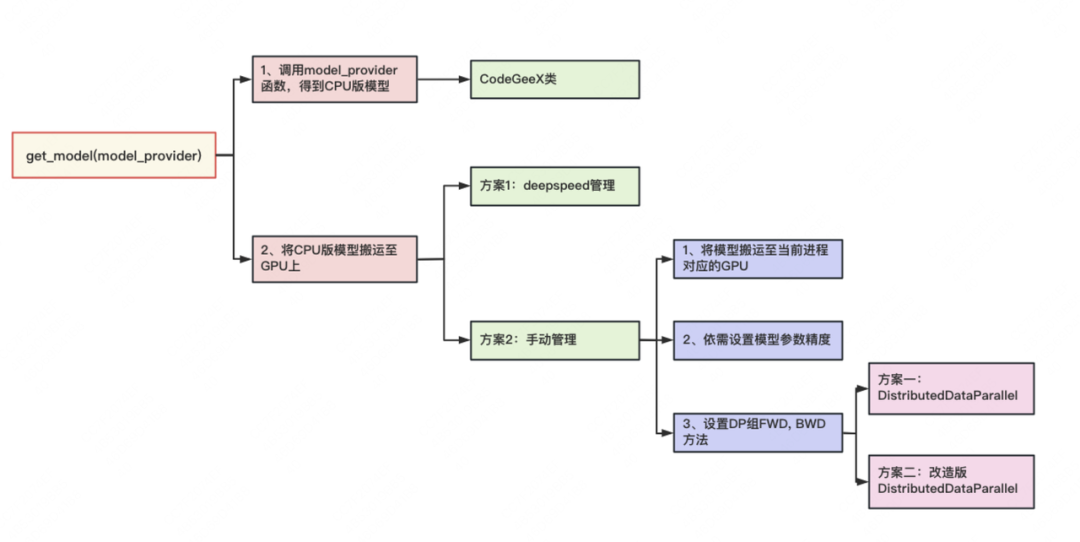
get_model函数主要做了两件事:
-
在CPU上定义模型。pytorch默认在CPU上定义模型(nn.Module)。
model_provider是一个函数,调用它即可返回CPU版的模型,也就是一个CodeGeeX类,这个将是下文要介绍的重点。 -
把模型从CPU搬运至GPU上。这里有两种方法可供选择:
- 「显式搬运。」即手动将模型搬运到当前进程所对应的GPU上
- 「权重精度设定。」由ZeRO的思想可知,在模型训练中,把权重精度从fp32降至fp16,是一种节省显存的好办法。如果确定使用这种优化办法,将模型搬运到GPU上后,我们需要修改精度。
-
「初始化DP组」。这里指的是
定义DP组间forward、backward和梯度计算与通讯等方法。在Megatron中,TP和PP组的这些方法是人为定义的(在定义CPU模型时已设置好,我们将在下文讲CodeGeeX细节时看到),而DP组则是可以用现成的(torch的DistributedDataParallel)。在具体使用时,我们可以:(1)直接调用DistributedDataParallel。或(2)在DistributedDataParallel这个类的基础上做一些改进,例如增加对碎片化内存的管理,对计算梯度时的精度控制等。
- 「方案一:借助deepspeed进行管理」。在源码解读1中我们提过,秉持着万物皆可wrap的原则,按照deepspeed官网教程,只需要在Megatron的某些文件中插入相应代码,就可以让deepspeed来管理模型的分布式、DP组间的显存优化等,这里同理。
- 「方案二:手动搬运管理。」这里需要我们以下事情:
get_model函数的核心代码如下(一切尽在注释中):
defget_model(model_provider_func):
"""Buildthemodel."""
args=get_args()
#1、定义并构建CPU版模型
if(#1.1、当分布式进行框架采用virtualpipeline(是NVDIA后续提出的对Megatron的优化方法,可先忽略不看)
mpu.get_pipeline_model_parallel_world_size()>1
andargs.virtual_pipeline_model_parallel_sizeisnotNone
):
model=[]
foriinrange(args.virtual_pipeline_model_parallel_size):
mpu.set_virtual_pipeline_model_parallel_rank(i)
#Setpre_processandpost_processonlyaftervirtualrankisset.
pre_process=mpu.is_pipeline_first_stage()
post_process=mpu.is_pipeline_last_stage()
this_model=model_provider_func(
pre_process=pre_process,post_process=post_process
)
model.append(this_model)
else:#1.2其余情况
#判断当前进程是否是PP组的第一个进程(例如第一部分图例中PP组的g0)
pre_process=mpu.is_pipeline_first_stage()
#判断当前进程是否是PP组的最后一个进程(例如第一部分图例中PP组的g12)
post_process=mpu.is_pipeline_last_stage()
#构建CPU版CodeGeeX模型
model=model_provider_func(pre_process=pre_process,post_process=post_process)
...
#2、将模型从CPU搬运到GPU上
#2.1如果采用Megatron-DeepSpeed的方式,则直接返回模型,后面的搬运,数据并行等工作将由deepspeed来完成
# ref:https://www.deepspeed.ai/tutorials/megatron/
ifargs.deepspeed:
returnmodel
#将当前进程所维护的模型,从CPU搬运到GPU上(GPU即为在初始化时为当前进程分配的那块GPU)
print(f">movingmodeltoGPU...",flush=True)
formodel_moduleinmodel:
model_module.cuda(torch.cuda.current_device())
print(f">movingtoGPUdone",flush=True)
#fp16转换(pytorch默认模型参数精度为fp32,依需决定计算过程中是否要转成fp16,节省显存)
ifargs.fp16orargs.bf16:
print(f">convertingmodeltofp16...",flush=True)
model=[Float16Module(model_module,args)formodel_moduleinmodel]
print(f">convertingtofp16done",flush=True)
#采用pytorch定义的DistributedDataParallel管理数据并行
ifargs.DDP_impl=="torch":
i=torch.cuda.current_device()
model=[
torchDDP(
model_module,
device_ids=[i],
output_device=i,
process_group=mpu.get_data_parallel_group(),#数据并行的组
)
formodel_moduleinmodel
]
returnmodel
#采用自定义的DistributedDataParallel管理数据并行
#即在pytorch的DistributedDataParallel的基础上,自己再定义内存管理、梯度精度等计算方式,更有效利用显存
ifargs.DDP_impl=="local":#自定义的数据并行类在megatron/model/distributed.py下
print(f">creatingDDPmodel...",flush=True)
model=[
LocalDDP(
model_module,
args.accumulate_allreduce_grads_in_fp32,
args.use_contiguous_buffers_in_ddp,
)
formodel_moduleinmodel
]
print(f">creatingDDPmodeldone",flush=True)
returnmodel
raiseNotImplementedError(
"UnknownDDPimplementationspecified:{}.""Exiting.".format(args.DDP_impl)
)
特别说明的是,前文提过模型的首尾两层和中间层的架构可能不一样,因此我们通过pre_process 和post_process来做区分。(当然你也能选择用进程序id,只是首尾两层经常被Q到,所以这里单独明确了下)。对CodeGeeX来说,由它预训练配置可知,它的PP并行度为1,也就是1块GPU上涵盖了模型的第一层至最后一层,所以pre_process和post_process实际上没有用到。感兴趣的朋友可以阅读NVIDIA Megatron源码下关于bert、gpt2的预训练代码,具体了解pre_process和post_process在定义模型时起的作用。
3.3 分布式模型:CodeGeeX
现在,我们来看最核心的分布式模型:CodeGeeX类。
前文说过,1个脚本处理的是1个进程上发生的事情,而1个进程对应的是模型的一部分。单进程的架构如下:
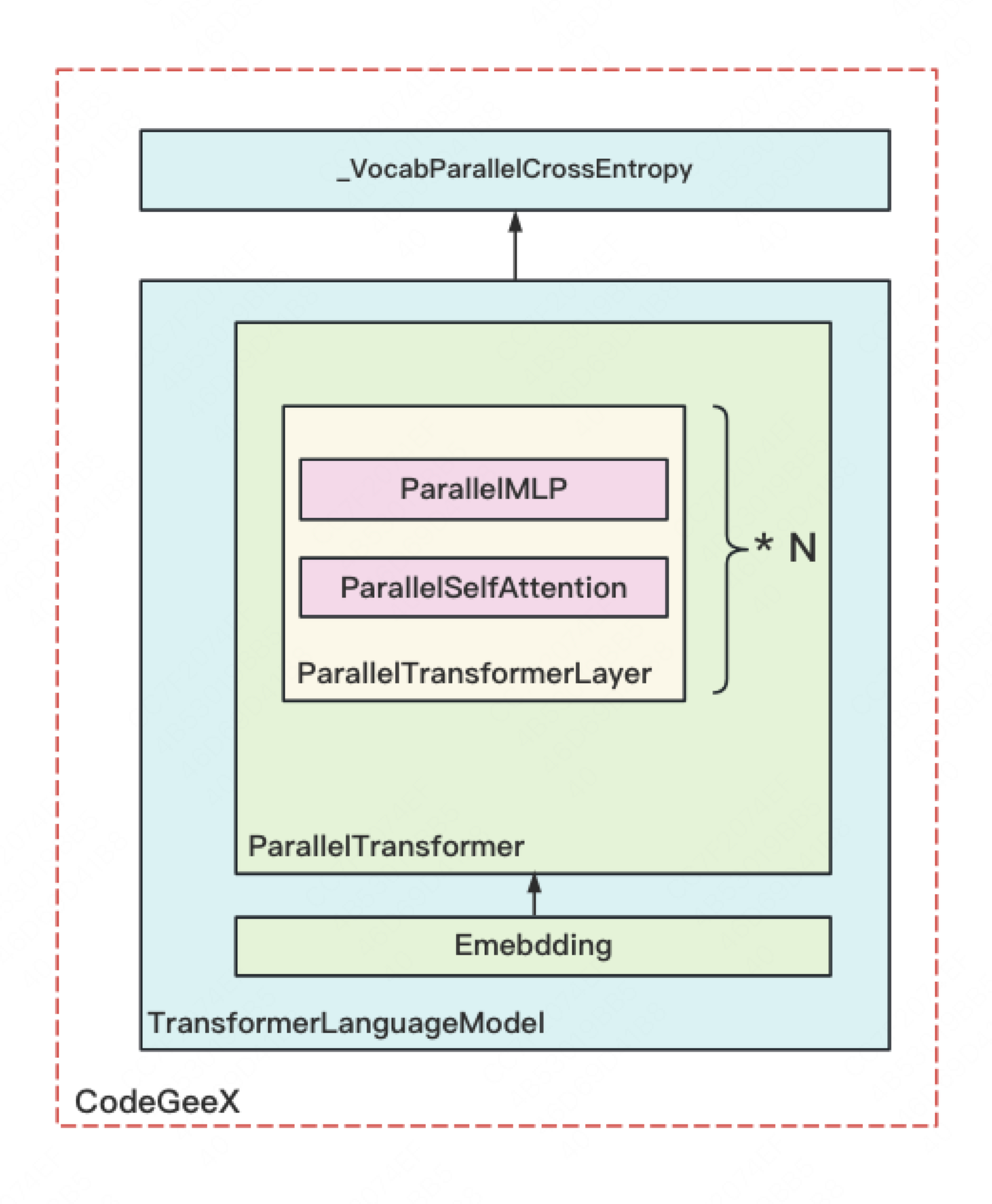
图中每个方框都表示源码里定义的一个nn.Module 类(除了最上的方框外)具体定义为:
-
CodeGeeX: 定义一块GPU上的模型。它由TransformerLanguageModel 和_VocabParallelCrossEntropy这两个核心类组成。 -
TransformerLanguageModel:定义每块GPU上输入层embedding和中间block层的结构 -
Embedding: 定义每块GPU上输入层embedding结构及相关计算,输出结果已AllReduce(TP组间) -
ParallelTransformer:定义每块GPU上所有中间blocks的结构及相关计算,输出结果已AllReduce(TP组间) -
ParallelTransformerLayer: 定义每块GPU上单个block的结构及相关计算,输出结果已AllReduce(TP组间) -
ParallelSelfAttention: 定义每块GPU上单个block中,attention的结构及相关计算,输出结果已AllReduce(TP组间) -
ParallelMLP: 定义每块GPU上单个block中,mlp层的结构及相关计算,输出结果已AllReduce(TP组间)。 -
_VocabParallelCrossEntropy: torch.autograd.Function,定义每块GPU上,输出层embedding、softmax和loss等结构及相关计算。
「为什么需要对输出做AllReduce?」回顾Megtron理论部分的讲解,在纵向切割模型时,Megatron是在输入X完整的情况下,设计模型切割的方式的。因此,对于模型的每一层输出,我们都要在TP组间做AllReduce,来保证下一层拿到的输入也是完整的。类名字中的"Parallel",也是指在TP组中做并行,如下图所示:
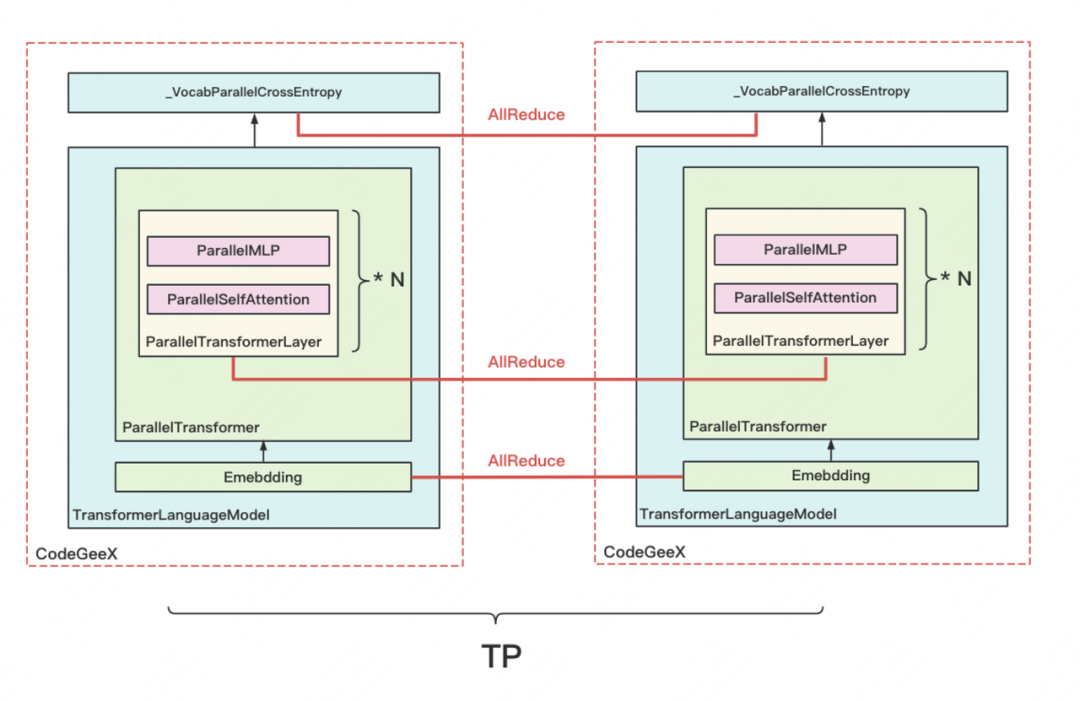
到这一步,我们终于把模型切割部分的整体流程讲完了。「虽然我们是以CodeGeeX为例,但这个流程图可以看作是通用的。」不同模型间只有模型具体结构、DP/TP/PP组设置这些方面的差别,整个并行框架是通用的。下面,我们来探究图中所绘的各个类的细节。
四、MegatronModule
上面所绘制的几类,并不是直接继承自nn.Module ,而是皆继承于自定义的class MegatronModule(torch.nn.Module)。我们说过,gpt类模型,输入和输出层共用一个word embedding。因此,这个类的主要作用,就是令PP组的第一个进程和最后一个进程满足这个条件(不过我不懂为什么要把这个限制放在一个大母类中去做,设计上感觉有点奇怪)。MegatronModule类的整体架构如下:
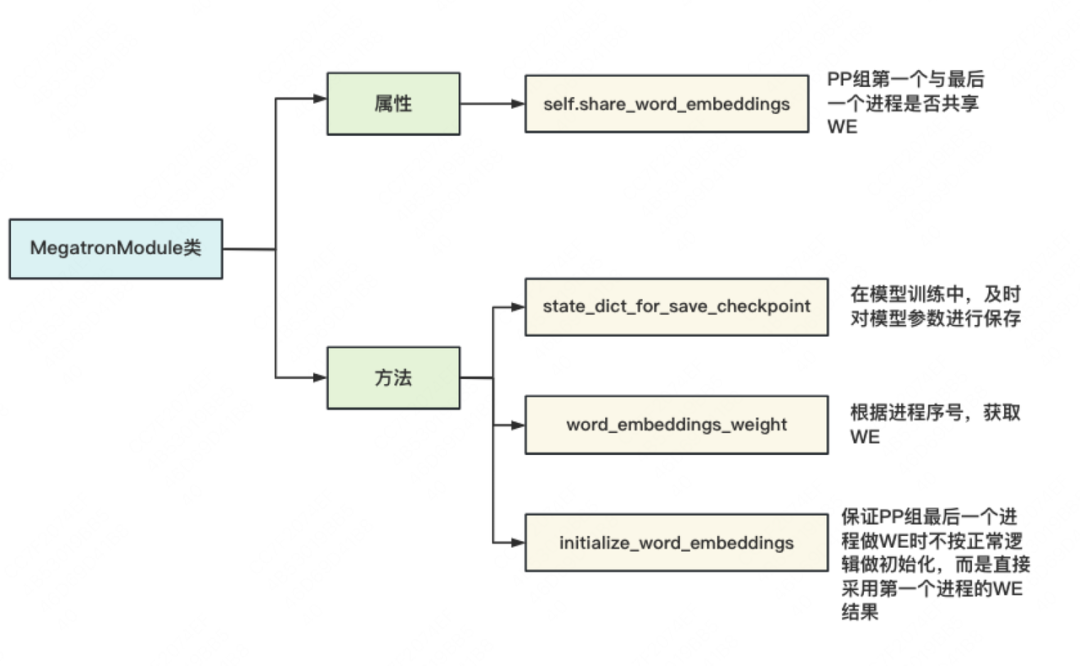
特别说明,「initialize_word_embedding 并不是某一具体的初始化WE方法,它只是起到如图所说的强制作用。」
MegatronModule的代码如下(一切尽在注释中):
classMegatronModule(torch.nn.Module):
"""MegatronspecificextensionsoftorchModulewithsupport
forpipelining."""
def__init__(self,share_word_embeddings=True):
super(MegatronModule,self).__init__()
#input和output是否要共享一套WE
self.share_word_embeddings=share_word_embeddings
defstate_dict_for_save_checkpoint(
self,destination=None,prefix="",keep_vars=False
):
"""Usethisfunctiontooverridethestatedictfor
savingcheckpoints."""
#模型训练中,及时将参数保存到指定位置(设置checkpoint),
#这样在训练出问题时,可以从checkpoint点重新load参数,继续训练
returnself.state_dict(destination,prefix,keep_vars)
defword_embeddings_weight(self):
"""获取word_embedding"""
ifmpu.is_pipeline_first_stage(ignore_virtual=True):
returnself.language_model.embedding.word_embeddings.weight
ifmpu.is_pipeline_last_stage(ignore_virtual=True):
ifnotself.share_word_embeddings:
raiseException(#强制要求共享一套embedding
"word_embeddings_weight()calledforlast"
"stage,butshare_word_embeddingsisfalse"
)
returnself.word_embeddings.weight#参见initialize_word_embeddings中WE的定义
raiseException(#如果当前进程是PP组的中间进程,则其上未维护WE,因此当然获取不到
"word_embeddings_weight()shouldbe""calledforfirstandlaststageonly"
)
definitialize_word_embeddings(self,init_method_normal):
"""强制PP组最后一个进程初始化WE时,直接使用PP组第一个进程的WE"""
args=get_args()
ifnotself.share_word_embeddings:#强制shareembeddingg
raiseException(
"initialize_word_embeddings()wascalledbut"
"share_word_embeddingsisfalse"
)
#PP组并行度为1时,第一层和最后一层都在一块GPU上,天然共享WE,无需做强制
ifargs.pipeline_model_parallel_size==1:
return
#---------------------------------------------------
#如果流水线并行的度不为1时,依次做三件事:
#【初始化时】:
#1、在PP组最后一个进程上初始化一个WE,令其取值全为0
#2、在PP组第一个进程与最后一个进程间做一次AllReduce,保证两者的WE完全一致
#【训练时】:
#3、每次想在PP组第一个/最后一个进程上使用WE时,要做一次通信,保证两者用的WE完全一致
ifmpu.is_pipeline_last_stage():#若当前进程是PP组最后一个进程
assertnotmpu.is_pipeline_first_stage()
self._word_embeddings_for_head_key="word_embeddings_for_head"
#初始化一个WE(已按vocab_size维度切割,可参见Megatron原理篇对WE的讲解)
#VocabParallelEmbedding将在下文详细讲解
self.word_embeddings=mpu.VocabParallelEmbedding(
args.padded_vocab_size,#vocab_size
args.hidden_size,#embed_dim
init_method=init_method_normal(args.init_method_std),#初始化方法(在model/utils.py下)
)
#用0填充WE(等待下面做AllReduce后取得第一个进程上的WE)
self.word_embeddings.weight.data.fill_(0)
self.word_embeddings.weight.shared=True
iftorch.distributed.is_initialized():
ifmpu.is_pipeline_first_stage()ormpu.is_pipeline_last_stage():#若当前进程是PP组第一个或最后一个进程
#在两进程间做AllReduce,保证它们使用的WE完全一致
# mpu.get_embedding_group:在源码解读1中讲过,是除DP/TP/PP之外设置的又一进程组,
#主要就是用来做关于WE的通讯
torch.distributed.all_reduce(
self.word_embeddings_weight().data,group=mpu.get_embedding_group()
)
else:
print(
"WARNING!Distributedprocessesaren'tinitialized,so"
"wordembeddingsinthelastlayerarenotinitialized."
"Ifyouarejustmanipulatingamodelthisisfine,but"
"thisneedstobehandledmanually.Ifyouaretraining"
"somethingisdefinitelywrong."
)
五、Embedding
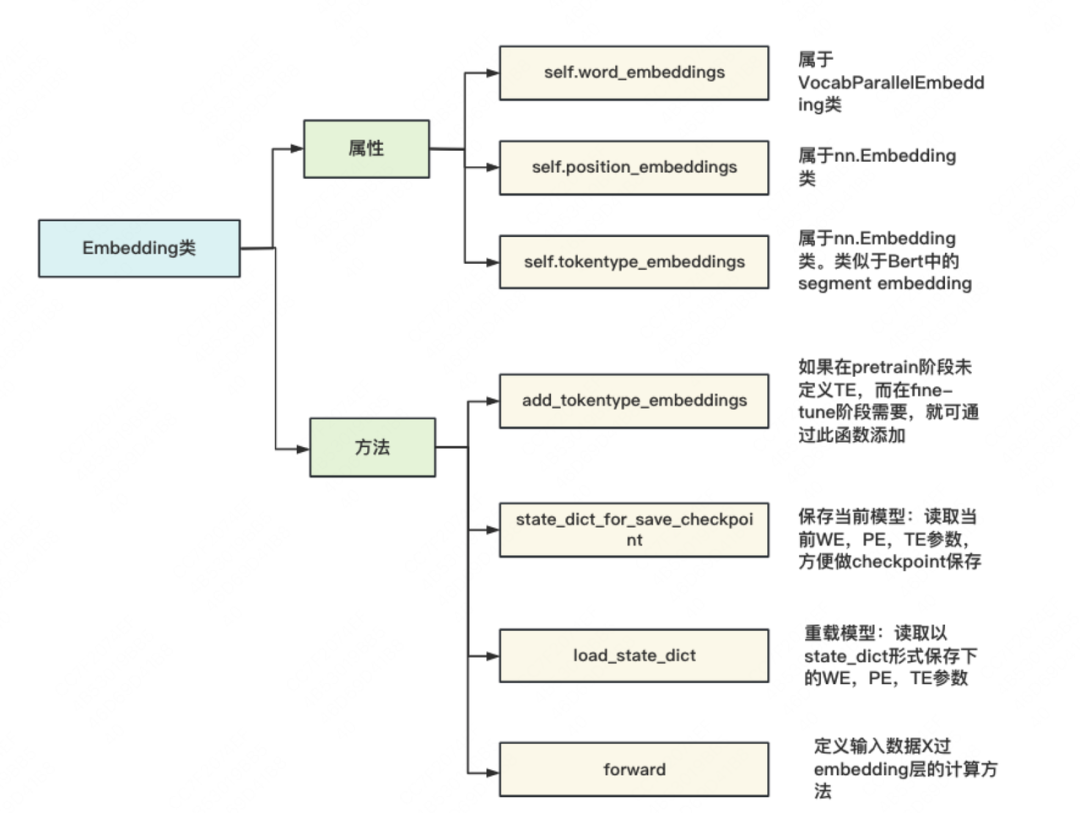
Emebdding类定义了word/position/segment embedding,并定义输入X过embedding层的计算方法。关键属性和方法如下图:
-
self.word_embeddings:来自自定义的VocabParallelEmbedding (下面会详述) 。「含“Parallel”则意味着参数在TP组间做了切割」。因此self.word_embeddings 是切割好的WE。每个进程上维护根据自己进程序号所取下的那块WE(例如下图中的WE1,WE2,图片来自Megatron原理篇):
-
self.position_embeddings和self.tokentype_embeddings这两者都和输入X相关,而输入X是不做切割的,因此这两者也无需切割。 -
state_dict_for_save_checkpoint和load_state_dict。在源码注解里,这两个函数分别给出了"easy load" 和"customize load"的注释,这个注释不是很贴切。实际上,前者用于在模型训练过程中及时读取当前参数,及时保存(做checkpoint);后者则一般用于模型的重载,例如训到一半挂掉了,我们就重新初始化一个新模型,重载上个checkpoint保存下的权重。
Embedding层代码如下(一切尽在注释中):
classEmbedding(MegatronModule):
"""Languagemodelembeddings.
Arguments:
hidden_size:hiddensize
vocab_size:vocabularysize
max_sequence_length:maximumsizeofsequence.This
isusedforpositionalembedding
embedding_dropout_prob:dropoutprobabilityforembeddings
init_method:weightinitializationmethod
num_tokentypes:sizeofthetoken-typeembeddings.0value
willignorethisembedding
"""
def__init__(
self,
hidden_size,#每个token的向量维度
vocab_size,#词表大小
max_sequence_length,#最长序列长度
embedding_dropout_prob,#dropoutprobabilityforembeddings
init_method,#初始化权重的方法
num_tokentypes=0,#类似于Bert中的segmenttype
):
super(Embedding,self).__init__()
args=get_args()
self.hidden_size=hidden_size
self.init_method=init_method
self.num_tokentypes=num_tokentypes
self.max_sequence_length=max_sequence_length
#WEsize:(vocab_size//TP_N,hidden_size)
#TP_N表示TP组模型并行度
self.word_embeddings=mpu.VocabParallelEmbedding(
vocab_size,self.hidden_size,init_method=self.init_method)
self._word_embeddings_key='word_embeddings'
self.vocab_size=vocab_size
#PEsize:(max_seq_len,hidden_size)
self.position_embeddings=torch.nn.Embedding(
max_sequence_length,self.hidden_size)
self.position_embeddings=self.position_embeddings.half()
self._position_embeddings_key='position_embeddings'
#Initializethepositionembeddings.
self.init_method(self.position_embeddings.weight)
#TE_size:(num_tokentypes,hidden_size)
#TE类似于Bert中的segmentembedding
self._tokentype_embeddings_key='tokentype_embeddings'
ifself.num_tokentypes>0:
self.tokentype_embeddings=torch.nn.Embedding(self.num_tokentypes,
self.hidden_size)
#Initializethetoken-typeembeddings.
self.init_method(self.tokentype_embeddings.weight)
else:
self.tokentype_embeddings=None
#Embeddingsdropout
self.embedding_dropout=torch.nn.Dropout(embedding_dropout_prob)
defadd_tokentype_embeddings(self,num_tokentypes):
"""如果在pretrain阶段未定义TE,而在fine-tune阶段TE,则可通过此函数添加
"""
ifself.tokentype_embeddingsisnotNone:
raiseException('tokentypeembeddingsisalreadyinitialized')
iftorch.distributed.get_rank()==0:
print('addingembeddingfor{}tokentypes'.format(num_tokentypes),
flush=True)
self.num_tokentypes=num_tokentypes
self.tokentype_embeddings=torch.nn.Embedding(num_tokentypes,
self.hidden_size)
#Initializethetoken-typeembeddings.
self.init_method(self.tokentype_embeddings.weight)
defforward(self,input_ids,position_ids,tokentype_ids=None):
"""定义输入X过embedding层的计算方法
"""
#words_embeddingssize=(b,seq_len,hidden_size)
#再次注意:self.word_embeddings做forward时,最终的输出结果时AllReduce的(见上图)
words_embeddings=self.word_embeddings(input_ids)
#position_embeddingssize=(b,seq_len,hidden_size)
position_embeddings=self.position_embeddings(position_ids)
#embedding=WE+PE
#embeddingsize=(b,seq_len,hidden_size)
embeddings=words_embeddings+position_embeddings
#依需要决定是否增加TE
iftokentype_idsisnotNone:
assertself.tokentype_embeddingsisnotNone
embeddings=embeddings+self.tokentype_embeddings(tokentype_ids)
else:
assertself.tokentype_embeddingsisNone
#Dropout.
embeddings=self.embedding_dropout(embeddings)
returnembeddings
defstate_dict_for_save_checkpoint(
self,destination=None,prefix='',keep_vars=False,
):
"""Foreasyload.
在模型训练过程中及时读取当前参数,方便及时保存(做checkpoint)
篇幅限制,这里不展示细节
"""
...
defload_state_dict(self,state_dict,strict=True):
"""Customizedload.
用于模型的重载。例如训到一半挂掉了,我们就重新初始化一个新模型,
重载上个checkpoint保存下的权重。
篇幅限制,这里不展示细节
"""
...
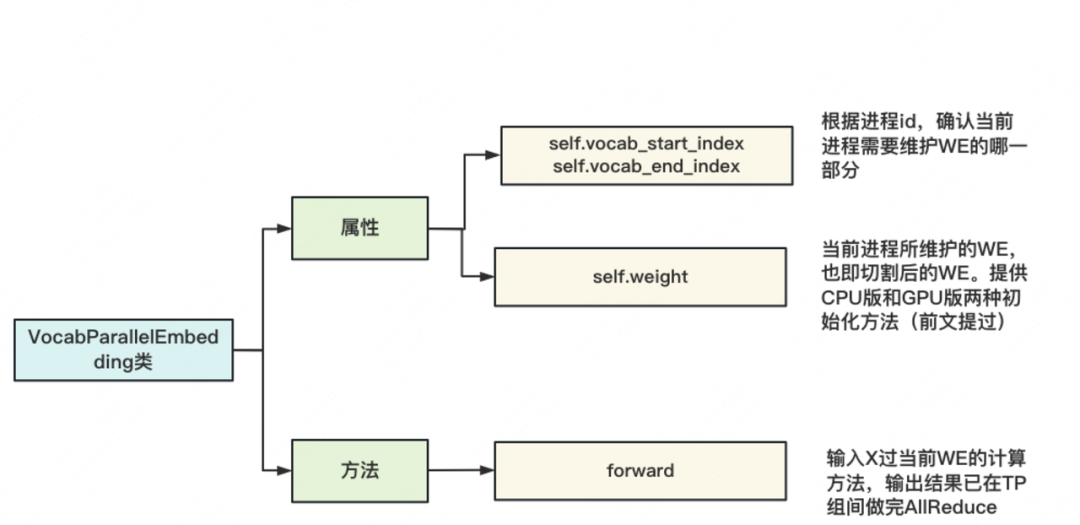
六、VocabParallelEmbedding
该类用于定义分布式的word embedding,整体架构如下,同样只列举了核心属性和方法:
具体代码如下,可以特别关注「初始化和forward」部分,同时建议大家阅读理论篇中关于这一过程的详细讲解(一切尽在注释中)
classVocabParallelEmbedding(torch.nn.Module):
"""Embeddingparallelizedinthevocabularydimension.
Thisismainlyadaptedfromtorch.nn.Embeddingandallthedefault
valuesarekept.
Arguments:
num_embeddings:vocabularysize.
embedding_dim:sizeofhiddenstate.
init_method:methodtoinitializeweights.
"""
def__init__(self,num_embeddings,embedding_dim,init_method=init.xavier_normal_):
super(VocabParallelEmbedding,self).__init__()
#Keeptheinputdimensions.
self.num_embeddings=num_embeddings#vocab_size
self.embedding_dim=embedding_dim#hidden_state.
#Setthedetaulsforcompatibility.
self.padding_idx=None
self.max_norm=None
self.norm_type=2.0
self.scale_grad_by_freq=False
self.sparse=False
self._weight=None
#当前进程所在TP组进程总数
self.tensor_model_parallel_size=get_tensor_model_parallel_world_size()
#根据当前进程在TP组中的序号,确定其所需维护的WE部分,沿着vocab维度对WE进行切割
#例如,进程id=0, 维护词表序号[0,5)范围内的数据;进程id=1,维护[5,10)
(
self.vocab_start_index,
self.vocab_end_index,
)=VocabUtility.vocab_range_from_global_vocab_size(
self.num_embeddings,
get_tensor_model_parallel_rank(),
self.tensor_model_parallel_size,
)
#计算当前进程维护的词表大小
self.num_embeddings_per_partition=(
self.vocab_end_index-self.vocab_start_index
)
#对WE做初始化
args=get_args()#读取预训练参数配置
ifargs.use_cpu_initialization:#CPU上做初始化
self.weight=Parameter(#在CPU上先生成一个完整的WE
torch.empty(
self.num_embeddings_per_partition,
self.embedding_dim,
dtype=args.params_dtype,
#dtype=torch.float32,
)
)
#对CPU上的WE做切割(随机种子在初始化分布式中已设定好,不用变)
_initialize_affine_weight_cpu(
self.weight,
self.num_embeddings,
self.embedding_dim,
self.num_embeddings_per_partition,
0,
init_method,#初始化权重的方法,例如xavier之类
)
else:#在GPU上做初始化
self.weight=Parameter(#生成一个切割好的WE
torch.empty(
self.num_embeddings_per_partition,
self.embedding_dim,
device=torch.cuda.current_device(),
dtype=args.params_dtype,
#dtype=torch.float32,
)
)
#在GPU上做初始化,注意TP组内不同进程采用不同的随机种子
_initialize_affine_weight_gpu(
self.weight,init_method,partition_dim=0,stride=1
)
defforward(self,input_):
"""定义输入X过WE的计算方法,输出结果已经过AllReduce"""
ifself.tensor_model_parallel_size>1:#如果使用TP
#如果在当前进程维护的WE上,找不到对应的单词,那么对应位置就赋0
#例如当前的数据的tokenid是:[2,7,1,5],当前维护的词表是[0,1,2](start_index=0, end_index = 3),
#则mask之后的数据为[2,0,1,0]
#Buildthemask.
input_mask=(input_< self.vocab_start_index) | (
input_ >=self.vocab_end_index
)
#Masktheinput.
masked_input=input_.clone()-self.vocab_start_index
masked_input[input_mask]=0
else:
masked_input=input_
#输入X,过当前进程维护的部分WE的结果
output_parallel=F.embedding(
masked_input,#tensorcontainingindicesintotheembeddingmatrix
self.weight,#切割好的wordembedding的权重
self.padding_idx,
self.max_norm,
self.norm_type,
self.scale_grad_by_freq,
self.sparse,
)
#当前词表不维护的部分,都设为0
ifself.tensor_model_parallel_size>1:
output_parallel[input_mask,:]=0.0#
#将TP组各GPU上的结果做AllReduce
output=reduce_from_tensor_model_parallel_region(output_parallel)
returnoutput
def_initialize_affine_weight_cpu(...):
"""CPU版权重初始化。这个不难,大家可以自己阅读"""
...
def_initialize_affine_weight_gpu(...):
"""GPU版权重初始化。特别关注设置随机种子部分"""
...
#借助deepspeed或自定义的get_cuda_rng_tracker方法,对随机种子进行操作
#get_cuda_rng_tracker细节,大家可自行阅读源码
ifds_checkpointing.is_configured():
globalget_cuda_rng_tracker
get_cuda_rng_tracker=ds_checkpointing.get_cuda_rng_tracker
withget_cuda_rng_tracker().fork():
init_method(weight)
七、ParallelSelfAttention:分布式block的一般套路
【阅读提示】:阅读本节时可:
- 对照第一部分CodeGeeX框架图
- 对照Megatron理论篇对矩阵切分的讲解
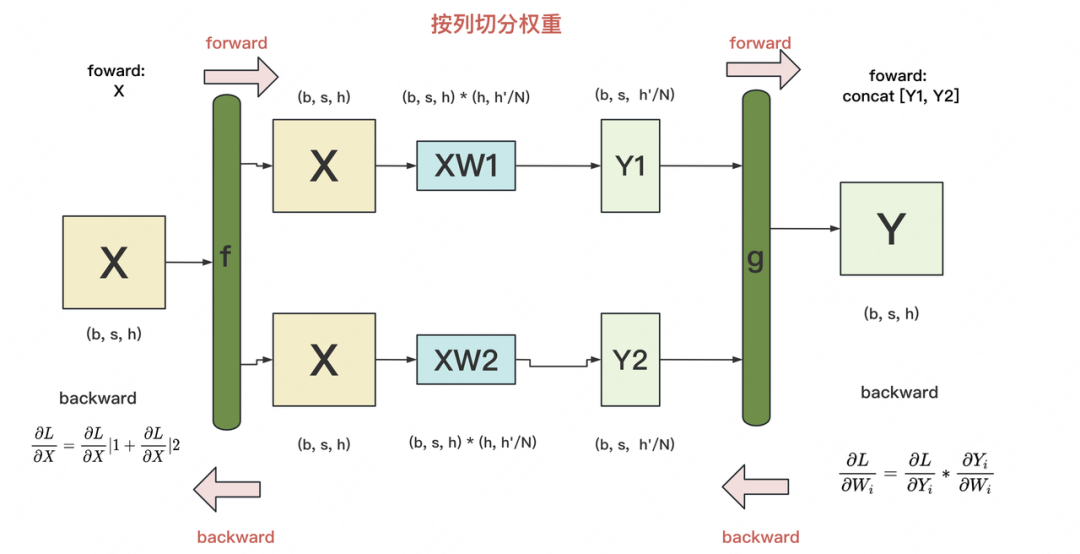
首先来看切割Attention的示意图,由图可知,「对QKV矩阵,采用“列切割”,对线性矩阵B,采用“行切割”」。这样设计的好处是,在经过QKV的计算后,各进程在不用通讯的前提下,继续做线性计算,直到最后一步才AllReduce,起到降低通讯成本的作用:
我们先单独来看“列切割”与“行切割”的实现代码。Megatron将它们定义成了两个nn.Module类。
7.1 列切割:ColumnParallelLinear
列切割示意图如下:
-
f和g是两个共轭算子,可理解为两个torch.autograd.Function类。在这个类下,我们可以「根据需要重写forward和backward方法」。 -
f: 「forward中,直接copy输入;backward中,对梯度做AllReduce」。在代码里定义为class _CopyToModelParallelRegion(torch.autograd.Function) -
g: 「forward中,all-gather输出;backward中,对梯度做split」(每张卡经过all-gather已有完整的Y了,因此以Y为起点计算梯度后,沿着列做split就可得到Y1和Y2的梯度)。在代码里定义为class _GatherFromModelParallelRegion(torch.autograd.Function)
classColumnParallelLinear(torch.nn.Module):
"""Linearlayerwithcolumnparallelism.
ThelinearlayerisdefinedasY=XA+b.Aisparallelizedalong
itsseconddimensionasA=[A_1,...,A_p].
Arguments:
input_size:firstdimensionofmatrixA.
output_size:seconddimensionofmatrixA.
bias:Iftrue,addbias
gather_output:Iftrue,callall-getheronoutputandmakeYavaiable
toallGPUs,otherwise,everyGPUwillhaveitsoutput
whichisY_i=XA_i
init_method:methodtoinitializeweights.Notethatbiasisalwaysset
tozero.
stride:Forthestridedlinearlayers.
keep_master_weight_for_test:Thiswasaddedfortestingandshouldbe
settoFalse.Itreturnsthemasterweights
usedforinitialization.
skip_bias_add:Thiswasaddedtoenableperformanceoptimationswherebias
canbefusedwithotherelementwiseoperations.weskip
addingbiasbutinsteadreturnit.
"""
#该类定义了切割后的权重W,例如对上图来说,W1和W2都可分别视为该类的一个实例
def__init__(
self,
input_size,#W的第一个维度
output_size,#W的第二个维度
bias=True,#是否需要引入bias
gather_output=True,#决定是否要将Y1和Y2做all-gather
init_method=init.xavier_normal_,
stride=1,
keep_master_weight_for_test=False,
skip_bias_add=False,
params_dtype=None,
skip_init=False,
device=None,
):
super(ColumnParallelLinear,self).__init__()
#Keepinputparameters
self.input_size=input_size
self.output_size=output_size
self.gather_output=gather_output
#Dividetheweightmatrixalongthelastdimension.
#当前进程所在TP组的总进程数
world_size=get_tensor_model_parallel_world_size()
#每块GPU上维护的hidden_size的大小,等于原hidden_zize//TP组总进程数
self.output_size_per_partition=divide(output_size,world_size)
self.skip_bias_add=skip_bias_add
self.params_dtype=params_dtype
self.device=device
#Parameters.
#Note:torch.nn.functional.linearperformsXA^T+bandasaresult
#Initializeweight.
args=get_args()#取得命令行所有的参数
ifnotskip_init:
ifargs.use_cpu_initialization:#CPU上初始化
self.weight=Parameter(
torch.empty(
self.output_size_per_partition,
self.input_size,
dtype=self.params_dtypeifself.params_dtypeisnotNoneelseargs.params_dtype,
)
)
self.master_weight=_initialize_affine_weight_cpu(#
self.weight,
self.output_size,
self.input_size,
self.output_size_per_partition,
0,
init_method,
stride=stride,
return_master_weight=keep_master_weight_for_test,
)
else:#GPU上初始化
self.weight=Parameter(
torch.empty(
self.output_size_per_partition,
self.input_size,
device=self.deviceifself.deviceisnotNoneelsetorch.cuda.current_device(),
dtype=self.params_dtypeifself.params_dtypeisnotNoneelseargs.params_dtype,
)
)
_initialize_affine_weight_gpu(
self.weight,init_method,partition_dim=0,stride=stride
)
else:
self.register_parameter("weight",None)
#对bias做处理,道理同weight
ifbiasandnotskip_init:
ifargs.use_cpu_initialization:#CPU上初始化
self.bias=Parameter(
torch.empty(self.output_size_per_partition,
dtype=self.params_dtypeifself.params_dtypeisnotNoneelseargs.params_dtype)
)
else:
self.bias=Parameter(#GPU上初始化
torch.empty(
self.output_size_per_partition,
device=self.deviceifself.deviceisnotNoneelsetorch.cuda.current_device(),
dtype=self.params_dtypeifself.params_dtypeisnotNoneelseargs.params_dtype,
)
)
set_tensor_model_parallel_attributes(self.bias,True,0,stride)
#Alwaysinitializebiastozero.
withtorch.no_grad():
self.bias.zero_()
else:
self.register_parameter("bias",None)
defforward(self,input_):
#定义列切割中的f算子
#调用copy_to_tensor_model_parallel_region则新建一个_CopyToModelParallelRegion实例(见下)
input_parallel=copy_to_tensor_model_parallel_region(input_)
bias=self.biasifnotself.skip_bias_addelseNone#定义bias
output_parallel=F.linear(input_parallel,self.weight,bias)#X*切割好的权重
#决定是否要对每个进程上的输出结果做All-Reduce
ifself.gather_output:
#定义列切割中的g算子
#调用gather_from_tensor_model_parallel_region则新建一个_GatherFromModelParallelRegion实例(见下)
output=gather_from_tensor_model_parallel_region(output_parallel)#把各GPU上的输出按照列gather起来后,作为最终输出
else:
output=output_parallel#否则最终输出还是自己算的那块GPU
output_bias=self.biasifself.skip_bias_addelseNone
returnoutput,output_bias
#列切割中的f与g
class_CopyToModelParallelRegion(torch.autograd.Function):
"""Passtheinputtothemodelparallelregion."""
#列切割下的f算子
# forward:copy输入
# backward:对梯度做AllReduce
@staticmethod
defsymbolic(graph,input_):
returninput_
@staticmethod
defforward(ctx,input_):
returninput_
@staticmethod
defbackward(ctx,grad_output):
return_reduce(grad_output)
class_GatherFromModelParallelRegion(torch.autograd.Function):
"""Gathertheinputfrommodelparallelregionandconcatinate."""
#列切割中的g算子
# forward:All-Gather输出
# backward:对梯度,沿着列方向做split
@staticmethod
defsymbolic(graph,input_):
return_gather(input_)
@staticmethod
defforward(ctx,input_):
return_gather(input_)
@staticmethod
defbackward(ctx,grad_output):
return_split(grad_output)
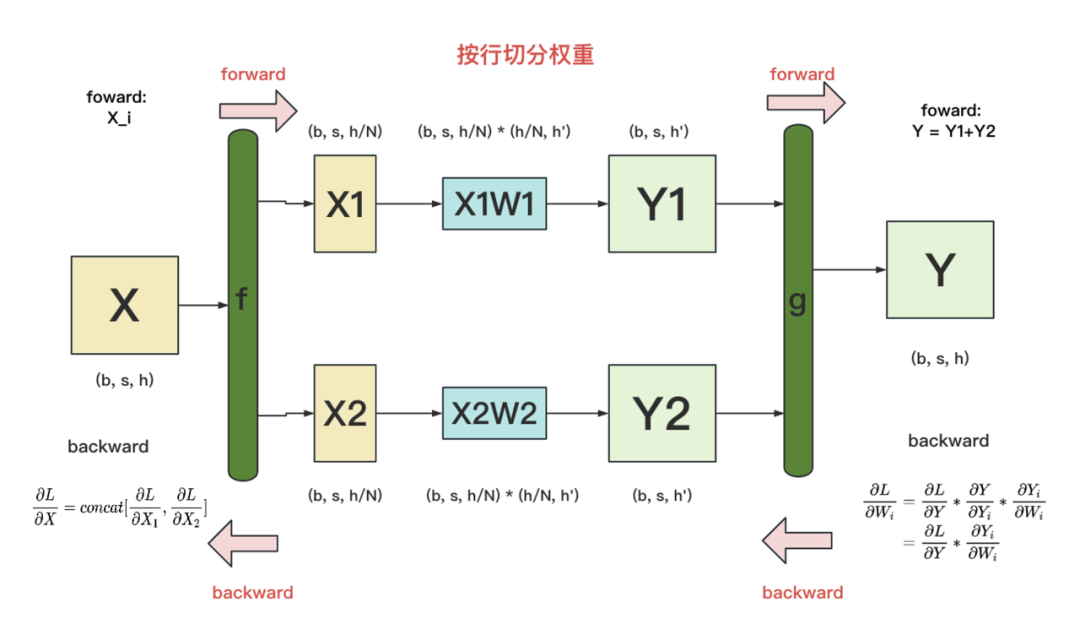
7.2 行切割:RowParallelLinear
-
f: forward中,按列split输入;backward中,all-gather梯度 -
g: forward中,AllReduce输出;backward中,直接输出梯度,无需做任何通讯(因为经过g的foward,每块GPU上已拥有了Yi和Y,则根据图中g的backward公式可知,每块GPU可独立计算梯度)
代码如下:
classRowParallelLinear(torch.nn.Module):
"""Linearlayerwithrowparallelism.
ThelinearlayerisdefinedasY=XA+b.Aisparallelizedalong
itsfirstdimensionandXalongitsseconddimensionas:
--
|A_1|
|.|
A=|.|X=[X_1,...,X_p]
|.|
|A_p|
--
Arguments:
input_size:firstdimensionofmatrixA.
output_size:seconddimensionofmatrixA.
bias:Iftrue,addbias.Notethatbiasisnotparallelized.
input_is_parallel:Iftrue,weassumethattheinputisalready
splitacrosstheGPUsandwedonotsplit
again.
init_method:methodtoinitializeweights.Notethatbiasisalwaysset
tozero.
stride:Forthestridedlinearlayers.
keep_master_weight_for_test:Thiswasaddedfortestingandshouldbe
settoFalse.Itreturnsthemasterweights
usedforinitialization.
skip_bias_add:Thiswasaddedtoenableperformanceoptimationswherebias
canbefusedwithotherelementwiseoperations.weskip
addingbiasbutinsteadreturnit.
"""
def__init__(
self,
input_size,
output_size,
bias=True,
input_is_parallel=False,
init_method=init.xavier_normal_,
stride=1,
keep_master_weight_for_test=False,
skip_bias_add=False,
params_dtype=None,
skip_init=False,
device=None,
):
super(RowParallelLinear,self).__init__()
#Keepinputparameters
self.input_size=input_size
self.output_size=output_size
self.input_is_parallel=input_is_parallel
#Dividetheweightmatrixalongthelastdimension.
world_size=get_tensor_model_parallel_world_size()
self.input_size_per_partition=divide(input_size,world_size)
self.skip_bias_add=skip_bias_add
self.params_dtype=params_dtype
self.device=device
#Parameters.
#Note:torch.nn.functional.linearperformsXA^T+bandasaresult
#weallocatethetranspose.
#Initializeweight.
args=get_args()
ifnotskip_init:
ifargs.use_cpu_initialization:
self.weight=Parameter(
torch.empty(
self.output_size,
self.input_size_per_partition,
dtype=self.params_dtypeifself.params_dtypeisnotNoneelseargs.params_dtype,
)
)
self.master_weight=_initialize_affine_weight_cpu(
self.weight,
self.output_size,
self.input_size,
self.input_size_per_partition,
1,
init_method,
stride=stride,
return_master_weight=keep_master_weight_for_test,
)
else:
self.weight=Parameter(
torch.empty(
self.output_size,
self.input_size_per_partition,
device=self.deviceifself.deviceisnotNoneelsetorch.cuda.current_device(),
dtype=self.params_dtypeifself.params_dtypeisnotNoneelseargs.params_dtype,
)
)
_initialize_affine_weight_gpu(
self.weight,init_method,partition_dim=1,stride=stride
)
else:
self.register_parameter("weight",None)
ifbiasandnotskip_init:
ifargs.use_cpu_initialization:
self.bias=Parameter(
torch.empty(self.output_size,
dtype=self.params_dtypeifself.params_dtypeisnotNoneelseargs.params_dtype)
)
else:
self.bias=Parameter(
torch.empty(
self.output_size,
device=self.deviceifself.deviceisnotNoneelsetorch.cuda.current_device(),
dtype=self.params_dtypeifself.params_dtypeisnotNoneelseargs.params_dtype,
)
)
#Alwaysinitializebiastozero.
withtorch.no_grad():
self.bias.zero_()
else:
self.register_parameter("bias",None)
defforward(self,input_):
#Setupbackpropall-reduce.
ifself.input_is_parallel:
input_parallel=input_
else:
input_parallel=scatter_to_tensor_model_parallel_region(input_)
#Matrixmultiply.
output_parallel=F.linear(input_parallel,self.weight)
#All-reduceacrossallthepartitions.
output_=reduce_from_tensor_model_parallel_region(output_parallel)
ifnotself.skip_bias_add:
output=output_+self.biasifself.biasisnotNoneelseoutput_
output_bias=None
else:
output=output_
output_bias=self.bias
returnoutput,output_bias
#行切割中的f和g算子
class_ScatterToModelParallelRegion(torch.autograd.Function):
"""Splittheinputandkeeponlythecorrespondingchucktotherank."""
#行切割中的f算子
# forward:沿列split输入
# backward:all-gather梯度
@staticmethod
defsymbolic(graph,input_):
return_split(input_)
@staticmethod
defforward(ctx,input_):
return_split(input_)
@staticmethod
defbackward(ctx,grad_output):
return_gather(grad_output)
class_ReduceFromModelParallelRegion(torch.autograd.Function):
"""All-reducetheinputfromthemodelparallelregion."""
#行切割中的g算子
# forward:AllReduce输出
# backward:正常计算梯度,GPU间无需做任何通讯
@staticmethod
defsymbolic(graph,input_):
return_reduce(input_)
@staticmethod
defforward(ctx,input_):
return_reduce(input_)
@staticmethod
defbackward(ctx,grad_output):
returngrad_output
7.3 ParallelSelfAttention
该类的构造如下图:
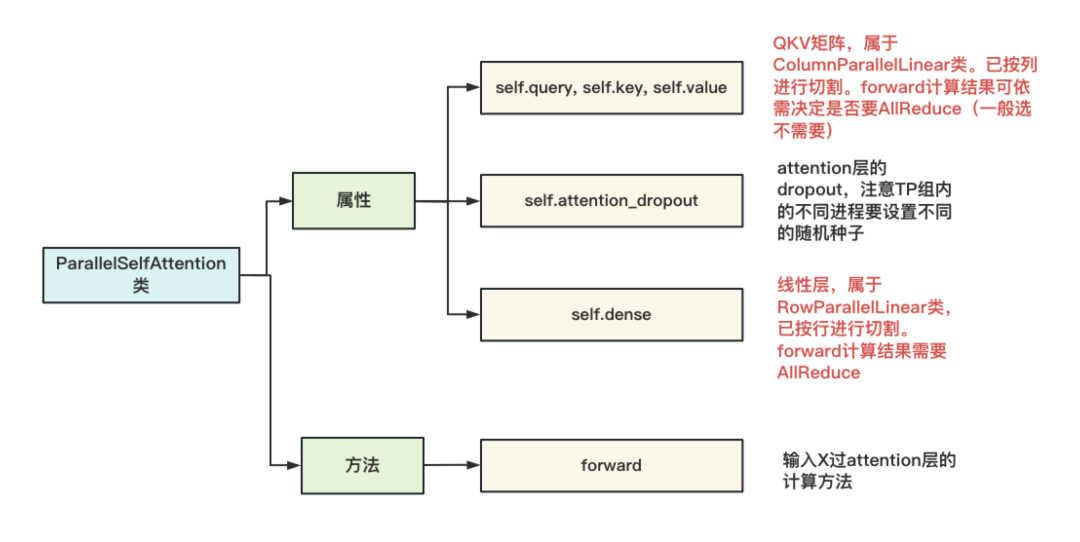
这张图中透露的核心含义是,「每个进程上维护的都是按列切割完的QKV矩阵」,进程间独立计算,QKV矩阵的输出结果一般不做AllReduce。同时,「每个进程上维护的是按行切割完的dense(线型层)矩阵」,Attention输出过线性层后的结果,做AllReduce。另外,在设置attention_dropout时,同样调用了get_cuda_rng_tracker 方法,令TP组内的进程拥有不同的随机种子。「最后,你可能想问,dense后的dropout去哪里了」?代码里把它定义到了ParallelTransformerLayer 下(等于attention + mlp)。
相信有了上面的说明,看这块代码就不难了。篇幅限制,这里不展示代码了。大家可以对照着CodeGeeX架构图,来看这里multi-head attention的计算方式。
ParallelMLP,ParallelTransformerLayer和ParallelTransformer都采用的是一样的套路,也略过不言。
八、CrossEntropy
现在,终于可以来看模型的最后一层:交叉熵的平行计算。核心类为_VocabParallelCrossEntropy
我们在原理篇中讲过交叉熵的并行计算,其优化核心是将通讯量从b*s*v降至b*s。但是Megatron代码中定义的交叉熵计算方式,稍微复杂一些,也和我们一般理解的交叉熵有些许差异。所以我们先用图解,来看下代码定义的交叉熵计算流程:
【注】:
- 对X和Y_i来说,(b, s, h)维度下应该画成一个立方体,为了表达简练,这里将b拍平了。
- 对其余维度中含b的矩阵,b正常表示,即row=b
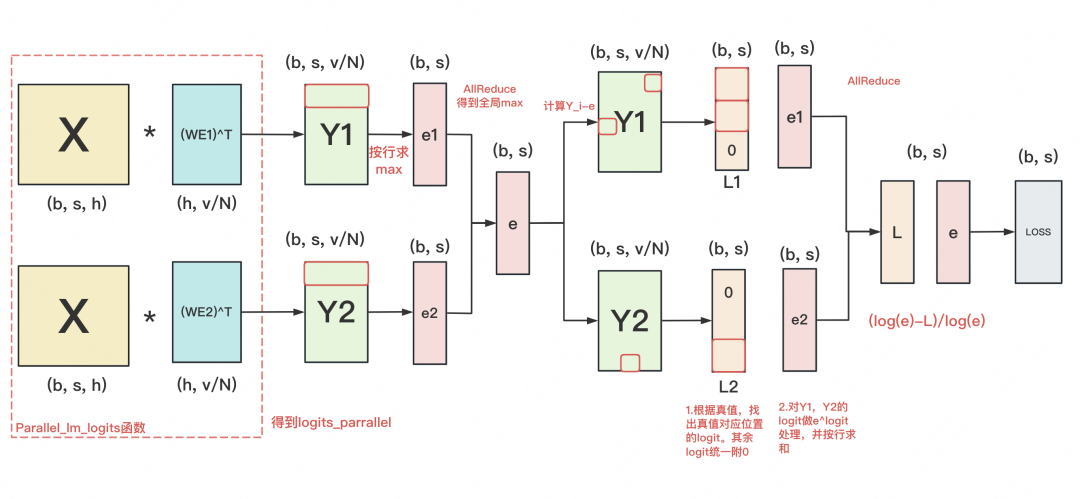
8.1 计算logit
首先,在使用_VocabParallelCrossEntropy 计算交叉熵前,我们需要计算logit。这时我们调用parallel_lm_logits 函数,将模型最后一层的输出X(复习一下,这个X已经在TP组内AllReduce了),乘上当前进程上维护的输入层WE的转置(复习一下,输入层和输出层共用一套embedding),得到当前进程的logit Y_i,「同时我们选择不对输出logit做AllReduce」。
你可能会有一个疑惑:「在Transformer中,输出层会额外训练一个线性矩阵,来计算logit;为什么在gpt中,可以用输入层WE的转置来代替这个线性矩阵?」
这个问题的答案,对理解Megatron交叉熵计算也至关重要。我们可「将X*WE^T结果理解成“X与WE间的相似度”」,例如对Y1来说,它的第一行中的每个logit,表示第一个token与词表里每个词的相似度。
注意到每个进程上只维护部分WE。例如,假设词表共有5个单词,WE1维护前5个单词,WE2维护后5个单词。因此再严格来说:「对Y1,它的第一行中的每个logit,表示第一个token与词表中前5个词的相似度;对Y2,它的第一行中的每个logit,表示第一个token与词表中后5个词的相似度。我们要记住这个含义。」
8.2 计算交叉熵
知道了logit的含义,我们来看交叉熵计算。
首先做了一系列求max的计算,得到基于全局的max(logit),再将orig_logit - max(logit),得到处理后的结果。这步理解起来不难,主要目的是为了防止计算溢出。
「接下来,就是基于logit算loss了。」
-
每个进程上都有一份(b, s)维度的真值,它表示每个token的真值是哪个词(词用id表示)。我们基于这份真值,在Y_i上找出真值位置的logit。例如:seq_length = 3,即我们需要对3个token去做预测,假设前两个token的真值在第1个进程所维护的WE1中,最后一个token的真值在第2个进程所维护的WE2中。那么我们去Y1的前两行里,取出真值位置的logit,这个logit表示“token与真值的相似度”,去Y2的最后一行里做同样操作。
-
这样,我们就能得到L1和L2,和真值位置不对应的地方,统一填充0。随后对L1和L2做AllReduce,得到L。「L中的每行表示“token与真值间的相似度"」
-
现在,我们回来对Y1和Y2的每一行求sum(e^logit),得到e1和e2。将e1和e2做AllReduce,得到e。「e中的每行表示“token和词表中所有词相似度的总和”」
-
我们希望「(token和词表中所有词相似度的总和-token与真值间的相似度) /token和词表中所有词相似度的总和」这个值最小,这个差值就是最终的loss。
8.3 代码
理清了这点,现在可以来看代码了(一切尽在注释中),建议对这块还有疑问的朋友,可以写个test脚本把中间结果打印出来,方便理解:
class_VocabParallelCrossEntropy(torch.autograd.Function):
"""
分布式计算Loss
"""
@staticmethod
defforward(ctx,vocab_parallel_logits,target):
#1.logit-globalmax(logit)操作,主要目的是防溢出
logits_max=torch.max(vocab_parallel_logits,dim=-1)[0]#(b,s,1)
torch.distributed.all_reduce(#(b,s,1)
logits_max,
op=torch.distributed.ReduceOp.MAX,#找全局最大值
group=get_tensor_model_parallel_group(),
)
#Subtractthemaximumvalue.
vocab_parallel_logits.sub_(logits_max.unsqueeze(dim=-1))#原始GPU上维护的logits减去每行最大值(防止溢出)
#2、根据当前进程id,取出当前进程所维护词表序号等信息
#函数,能够获取当前进程所维护词表的start_index和end_index
get_vocab_range=VocabUtility.vocab_range_from_per_partition_vocab_size
#这块GPU上logits最后一维的大小,等于所维护的词表的大小(v/N)
partition_vocab_size=vocab_parallel_logits.size()[-1]
#取得当前进程所在TP组中的序号
rank=get_tensor_model_parallel_rank()
#取得当前进程所在TP组的总进程数
world_size=get_tensor_model_parallel_world_size()
#取得当前进程所维护的词表的start_index和end_index
vocab_start_index,vocab_end_index=get_vocab_range(
partition_vocab_size,rank,world_size
)
#3.基于真值,取出每个token在真值位置上的logit(即和真值的相似度)
#Createamaskofvalidvocabids(1meansitneedstobemasked)
target_mask=(target< vocab_start_index) | (target >=vocab_end_index)#target=(b,s)
masked_target=target.clone()-vocab_start_index
masked_target[target_mask]=0
#Getpredicted-logits=logits[target].
#ForSimplicity,weconvertlogitstoa2-Dtensorwithsize
#[*,partition-vocab-size]andtargettoa1-Dtensorofsize[*].
logits_2d=vocab_parallel_logits.view(-1,partition_vocab_size)#(b*s,v/N)
masked_target_1d=masked_target.view(-1)#(b*s)
arange_1d=torch.arange(#[b*s]
start=0,end=logits_2d.size()[0],device=logits_2d.device
)
#logits_2d[arange_1d,masked_target_1d]:
# tensor的切片操作。arange_1d:取出所有的行。masked_target_1d:取出logit
predicted_logits_1d=logits_2d[arange_1d,masked_target_1d]#(b*s)
predicted_logits_1d=predicted_logits_1d.clone().contiguous()
predicted_logits=predicted_logits_1d.view_as(target)#(b,s)
predicted_logits[target_mask]=0.0
#AllreduceisneededtogetthechunksfromotherGPUs.
torch.distributed.all_reduce(#allreduce之后得到的logit矩阵为(b,s),每一个位置表示对应真值位置的预测logit
predicted_logits,
op=torch.distributed.ReduceOp.SUM,
group=get_tensor_model_parallel_group(),
)
#SumofexponentialoflogitsalongvocabdimensionacrossallGPUs.
exp_logits=vocab_parallel_logits#(b,s,v/N)
torch.exp(vocab_parallel_logits,out=exp_logits)
sum_exp_logits=exp_logits.sum(dim=-1)#(b,s)
torch.distributed.all_reduce(
sum_exp_logits,
op=torch.distributed.ReduceOp.SUM,
group=get_tensor_model_parallel_group(),
)
#4.计算Loss=log(sum(exp(logits)))-predicted-logit.
loss=torch.log(sum_exp_logits)-predicted_logits#(b,s)
#Storesoftmax,target-maskandmasked-targetforbackwardpass.
exp_logits.div_(sum_exp_logits.unsqueeze(dim=-1))
ctx.save_for_backward(exp_logits,target_mask,masked_target_1d)
returnloss
@staticmethod
defbackward(ctx,grad_output):
#Retreivetensorsfromtheforwardpath.
softmax,target_mask,masked_target_1d=ctx.saved_tensors
#Alltheinputshavesoftmaxastheirgradient.
grad_input=softmax
#Forsimplicity,workwiththe2Dgradient.
partition_vocab_size=softmax.size()[-1]
grad_2d=grad_input.view(-1,partition_vocab_size)
#Addthegradientfrommatchingclasses.
arange_1d=torch.arange(start=0,end=grad_2d.size()[0],device=grad_2d.device)
grad_2d[arange_1d,masked_target_1d]-=1.0-target_mask.view(-1).float()
#Finallyelementwisemultiplicationwiththeoutputgradients.
grad_input.mul_(grad_output.unsqueeze(dim=-1))
returngrad_input,None
九、总结
啊这总结怎么写呢,呕心沥血终于写完了。希望能给到大家帮助!
-
gpu
+关注
关注
28文章
4810浏览量
129612 -
源码
+关注
关注
8文章
656浏览量
29673 -
大模型
+关注
关注
2文章
2726浏览量
3337
原文标题:图解大模型训练之:Megatron源码解读2,模型并行
文章出处:【微信号:GiantPandaCV,微信公众号:GiantPandaCV】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于Transformer做大模型预训练基本的并行范式
【大语言模型:原理与工程实践】大语言模型的预训练
【「基于大模型的RAG应用开发与优化」阅读体验】+大模型微调技术解读
用PVC管自制遥控火车模型的教程图解
Pytorch模型训练实用PDF教程【中文】
基于EAIDK的人脸算法应用-源码解读(2)
超大Transformer语言模型的分布式训练框架
探究超大Transformer语言模型的分布式训练框架
KT利用NVIDIA AI平台训练大型语言模型
图解大模型系列之:Megatron源码解读1,分布式环境初始化

图解大模型训练之:数据并行上篇(DP, DDP与ZeRO)
DeepSpeed结合Megatron-LM训练GPT2模型笔记

大模型分布式训练并行技术(一)-概述
基于PyTorch的模型并行分布式训练Megatron解析






 工商网监
工商网监
评论