 机器鱼胸鳍上下摆动功能的实现
机器鱼胸鳍上下摆动功能的实现
1. 运动功能说明
本文示例将实现R330样机机器鱼胸鳍能够灵活的上下摆动的功能。

2. 结构说明
本样机采用舵机模块来进行仿生机器鱼结构的设计。
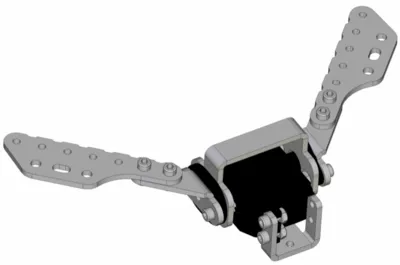 胸鳍
胸鳍 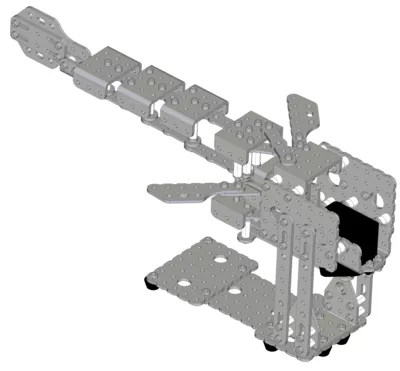 整机
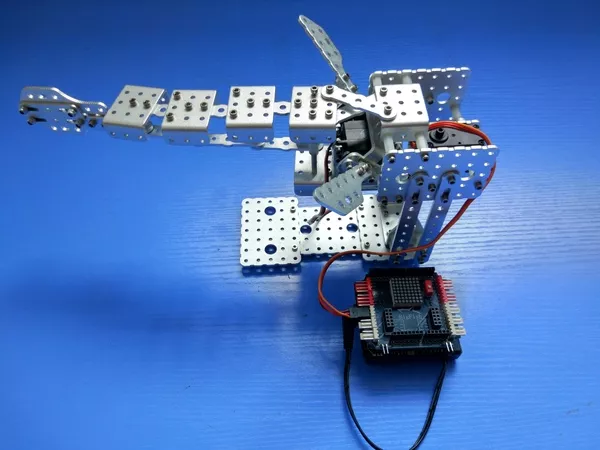
整机
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 电池 | 7.4V锂电池 |
电路连接:将舵机连接在Bigfish扩展板的D4端口。
4. 运动功能实现
编程环境:Arduino 1.8.19
下面提供一个机器鱼胸鳍上下摆动的参考例程(fishQi.ino),例程源代码详见(https://www.robotway.com/h-col-236.html),实验效果可参考网站演示视频。
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2023-05-23 https://www.robotway.com/ ------------------------------*/ #include < Servo.h > int _ABVAR_1_angle_current2 = 0 ; int _ABVAR_2_num = 0 ; Servo servo_pin_4; int _ABVAR_3_angle_current1 = 0 ; void up_down(); void down_up(); void setup() { servo_pin_4.attach(4); } void loop() { down_up(); up_down(); } void down_up() { _ABVAR_1_angle_current2 = 30 ; for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 16 ); _ABVAR_2_num++ ) { _ABVAR_1_angle_current2 = ( _ABVAR_1_angle_current2 + 5 ) ; servo_pin_4.write( _ABVAR_1_angle_current2 ); delay( 50 ); } } void up_down() { _ABVAR_3_angle_current1 = 110 ; for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 16 ); _ABVAR_2_num++ ) { _ABVAR_3_angle_current1 = ( _ABVAR_3_angle_current1 - 5 ) ; servo_pin_4.write( _ABVAR_3_angle_current1 ); delay( 50 ); } }
下面再给大家提供一个机器鱼鱼尾摆动的参考例程(fishTail.ino),大家可以尝试改写一下舵机摆动角度参数,让机器鱼尾能够灵活的摆动。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-05-23 https://www.robotway.com/
------------------------------*/
#include < Servo.h >
int _ABVAR_1_angle_right = 0 ;
int _ABVAR_2_num = 0 ;
Servo servo_pin_4;
int _ABVAR_3_angle_left = 0 ;
void Right_Left();
void left_Right();
void setup()
{
servo_pin_4.attach(4);
}
void loop()
{
left_Right();
Right_Left();
}
void Right_Left()
{
_ABVAR_1_angle_right = 70 ;
for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 8 ); _ABVAR_2_num++ )
{
_ABVAR_1_angle_right = ( _ABVAR_1_angle_right + 5 ) ;
servo_pin_4.write( _ABVAR_1_angle_right );
delay( 100 );
}
}
void left_Right()
{
_ABVAR_3_angle_left = 110 ;
for (_ABVAR_2_num= 1; _ABVAR_2_num<= ( 8 ); _ABVAR_2_num++ )
{
_ABVAR_3_angle_left = ( _ABVAR_3_angle_left - 5 ) ;
servo_pin_4.write( _ABVAR_3_angle_left );
delay( 100 );
}
}
审核编辑黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器鱼
+关注
关注
0文章
11浏览量
3165
发布评论请先 登录
相关推荐
新技术解决方案 复合机器人 CNC 自动上下料
在追求高效、精准与自动化的现代制造业中,CNC加工技术的应用日益广泛。然而,CNC机床的上下料过程往往成为制约生产效率的瓶颈。为了突破这一限制,富唯智能推出了复合机器人CNC自动上下料解决方案,重塑生产流程,提升生产效率与灵活性
复合机器人:CNC 行业上下料的高效变革者
在竞争激烈的 CNC 加工领域,提高生产效率、降低成本并确保加工精度是企业持续发展的关键。富唯智能复合机器人的出现,为 CNC 行业的上下料环节带来了创新性的解决方案,成为众多企业实现智能化升级的核心驱动力。


PLC远程上下载网关的功能特点
上下载网关作为一种关键设备,其重要性日益凸显。本文将详细探讨PLC远程上下载网关的功能特点。 1. 远程访问与程序上下载 PLC远程上下载网

复合机器人CNC柔性上下料
随着制造业的快速发展,提高生产效率、降低人力成本、确保产品质量已成为企业竞争的关键。本项目针对一家模具制造企业的CNC加工环节,引入富唯智能复合机器人自动上下料系统,以优化生产流程,提升生产效率。
复合机器人在磁钢上下料中的应用及其优势分析
复合机器人是一种集成了移动机器人和工业机器人功能的设备,其独特之处在于拥有“手、脚、眼、脑”的综合能力,从而实现了更高的灵活性和操作效率。在
富唯智能案例|3D视觉引导机器人抓取鞋垫上下料
随着制造业对自动化、智能化需求的不断提升,如何实现鞋垫上下料的精准、高效操作成为了企业亟待解决的问题。传统的上下料方式往往依赖人工,存在效率低下、精度不足等问题。而富唯智能的3D视觉引导机器

机器人上下料为汽车制造车间实现高效自动化
在汽车制造领域,上下料环节一直是生产线上的重要环节,也是提高生产效率和质量的关键所在。传统的上下料方式往往依赖于人工操作,不仅效率低下,还存在安全风险。然而,随着富唯智能复合机器人的引入,许多汽车零部件制造企业成功
高效、安全、智能:机器人如何重塑行业内部物流上下料流程?
高效、安全、智能:机器人如何重塑行业内部物流上下料流程? 机器人上下料AMR(自主移动机器人)的应用,为行业内部物流带来了革命性的改变。A



PLC远程上下载功能实现的基本原理
PLC远程上下载功能实现的基本原理 首先,需要一个支持PLC远程上下载的物联网网关,该网关通常具有网口、RS485、232等接口,以连接PLC和其他物联网设备。远程





 工商网监
工商网监
评论