 如何让机器鸟实现扇动翅膀的功能?
如何让机器鸟实现扇动翅膀的功能?
1. 功能说明
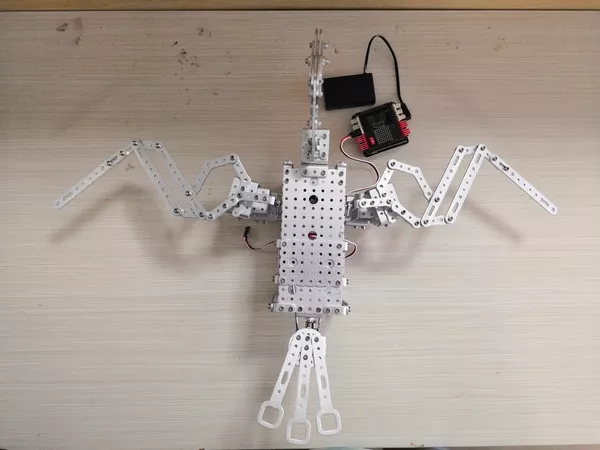
本文示例将实现R329样机机器鸟扇动翅膀的功能。

2. 结构说明
鸟类的翅膀主要由肩关节、肘关节、腕关节组成,本样机利用组合机构设计机器鸟的扑翼机构。
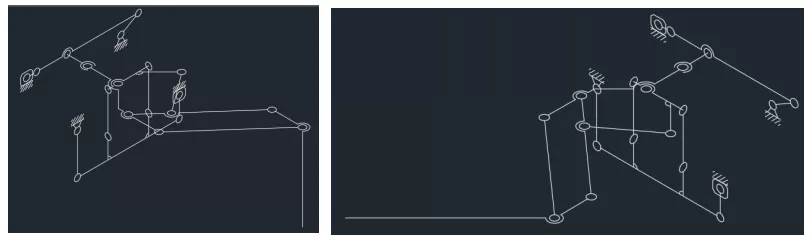 拥有两个关节的机器鸟扑翼机构结构图
拥有两个关节的机器鸟扑翼机构结构图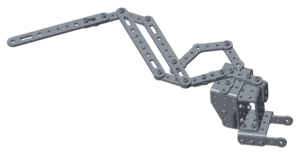 单侧翅膀
单侧翅膀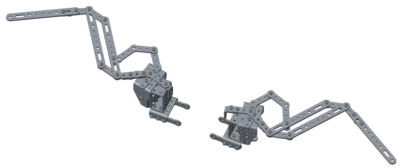 双翅
双翅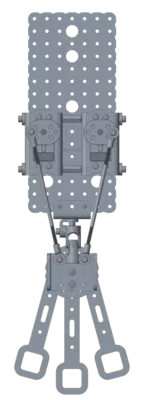 尾部
尾部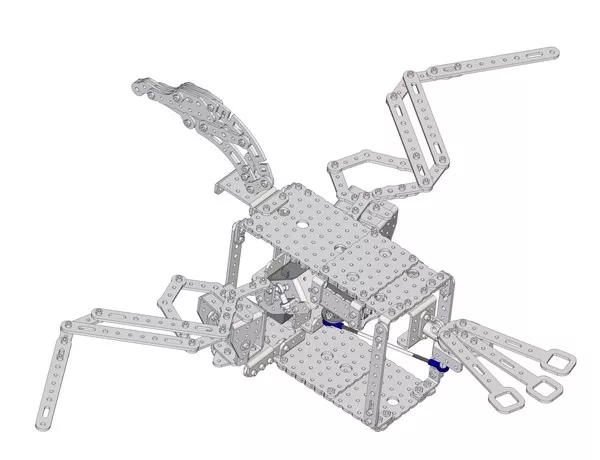 整机
整机3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
|
主控板 |
|
|
扩展板 |
|
|
电池 |
7.4V锂电池 |
电路连接:将舵机连接在Bigfish扩展板的D3端口。
4. 功能实现
编程环境:Arduino 1.8.19
下面提供一个机器鸟扇动翅膀的参考例程(Bird_Wing_Fly.ino),例程源代码及样机3D文件详见【 https://www.robotway.com/h-col-231.html 】,实验效果可参考演示视频。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-05-24 https://www.robotway.com/
------------------------------*/
#include < Servo.h >
int _ABVAR_1_Subdivision_number = 0 ;
int _ABVAR_2_Flags = 0 ;
Servo servo_pin_3;
int _ABVAR_3_Servo3_Start = 0 ;
int _ABVAR_4_Servo3_End = 0 ;
int _ABVAR_5_Angle_Of_Each_Time = 0 ;
int _ABVAR_6_value1 = 0 ;
int _ABVAR_7_Angle_Of_Change = 0 ;
int _ABVAR_8_value2 = 0 ;
void Wing_Open();
void Wing_Close();
void setup()
{
servo_pin_3.attach(3);
_ABVAR_1_Subdivision_number = 14 ;
_ABVAR_2_Flags = 0 ;
servo_pin_3.write( 80 );
delay( 1000 );
}
void loop()
{
Wing_Close();
Wing_Open();
}
void Wing_Close()
{
_ABVAR_3_Servo3_Start = 10 ;
_ABVAR_4_Servo3_End = 80 ;
_ABVAR_5_Angle_Of_Each_Time = ( abs( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) / _ABVAR_1_Subdivision_number ) ;
if (( ( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) > ( 1 ) ))
{
_ABVAR_2_Flags = -1 ;
}
else
{
_ABVAR_2_Flags = 1 ;
}
for (_ABVAR_6_value1= 1; _ABVAR_6_value1<= ( ( _ABVAR_1_Subdivision_number + 1 ) ); _ABVAR_6_value1++ )
{
_ABVAR_7_Angle_Of_Change = ( _ABVAR_3_Servo3_Start + ( _ABVAR_5_Angle_Of_Each_Time * _ABVAR_2_Flags ) ) ;
servo_pin_3.write( _ABVAR_7_Angle_Of_Change );
_ABVAR_3_Servo3_Start = _ABVAR_7_Angle_Of_Change ;
delay( 28 );
}
}
void Wing_Open()
{
_ABVAR_3_Servo3_Start = 80 ;
_ABVAR_4_Servo3_End = 10 ;
_ABVAR_5_Angle_Of_Each_Time = ( abs( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) / _ABVAR_1_Subdivision_number ) ;
if (( ( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) > ( 1 ) ))
{
_ABVAR_2_Flags = -1 ;
}
else
{
_ABVAR_2_Flags = 1 ;
}
for (_ABVAR_8_value2= 1; _ABVAR_8_value2<= ( ( _ABVAR_1_Subdivision_number + 1 ) ); _ABVAR_8_value2++ )
{
_ABVAR_7_Angle_Of_Change = ( _ABVAR_3_Servo3_Start + ( _ABVAR_5_Angle_Of_Each_Time * _ABVAR_2_Flags ) ) ;
servo_pin_3.write( _ABVAR_7_Angle_Of_Change );
_ABVAR_3_Servo3_Start = _ABVAR_7_Angle_Of_Change ;
delay( 65 );
}
}
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Arduino
+关注
关注
188文章
6468浏览量
186954
发布评论请先 登录
相关推荐
太好鸟!NW334高传输率,150M,这次绝对够用鸟!
发现了这款NW334,终于让我峰回路转,还赢得了同事们的夸赞!人生的际遇总是这么一波三折,不过人生就是把一次旅行嘛,沿途的风景就是无数身边的琐碎小事,只有分享鸟,才会感觉到它的价值,才能感受到生活的精彩
发表于 04-01 13:35
循线音乐百灵鸟机器人--鸥鹏机器人制作
循线音乐百灵鸟机器人,完成任务:让小机器人沿着布置好的轨道行走,播放主人喜欢的音乐唤醒房间的主人。孩子们可以学习如何用简单的扬声器发出各种声音,掌握频率和声音之间的关系,并能够用简单的
发表于 03-30 17:02
【NUCLEO-F412ZG申请】扑巽机翅膀下升力感应器
申请理由:项目描述:扑巽机翅膀下升力感应通过两路闭环气压压力传感器I2C接口和6个主机定时器实现,当翅膀下的升力大机扑巽机重量时,主机改变翅膀形状保持像
发表于 11-07 16:35
人工神经网络之深度学习
,制造出可以滑翔的用布料制造的飞翼,从悬崖上飞起来,需要迎面有大风的时候才可以。这里模仿的是鸟类不扇动翅膀的时候在天上滑翔的状态。把飞翼放在山口风很大的地方也可以飞起来,而且风力越大,飞得越高。飞翼
发表于 07-12 07:03
智能驱鸟器,智能型超声波驱鸟器,多功能防鸟驱鸟设备
单片机主板设计,安装方便,供电方面采用了蓄电池和太阳能双重供电方式,可在偏远的野外环境中使用。开启默认起用多普勒雷达探测器和拾音器探测器等功能,当雷达探测到鸟类靠近或拾音器探测到鸟的鸣叫时,系统依据白天
发表于 11-01 11:45
有羽毛有翅膀可折叠 鸟形无人机可逆强风自由飞翔
近日洛桑联邦理工大学(EPFL)智能系统实验室的研究人员已经研制出了一种带翅膀的低耗能无人机,它能在飞行过程中改变翼展长度,还能在狭窄空间中高速飞行。 有羽毛有翅膀可折叠 鸟形无人机可逆强风自由飞翔 早在一亿六千万年前,鸟类就开
发表于 12-27 13:00
•1228次阅读
区块链技术是否能阻止一只蝴蝶轻轻扇动翅膀就可引起的金融大风暴危机?
在当今全球化越来越紧密联系的情况下,亚马逊雨林的一只蝴蝶轻轻扇动翅膀,就有可能引起德克萨斯州的一场龙卷风。目前在全球金融联系越来越紧密的情况下,任何一个国家金融系统出现问题都可能引起席卷全球的大风
发表于 08-10 09:17
•1612次阅读
声控鸟电路
声控鸟是一种仿真电子工艺品。其外观为一或两只彩羽雀鸟停栖于树枝上之造型。在声控或手动开关操作下,使雀鸟发出动听的呜叫声。同时,鸟身还会作出摆动、扇翅等动作,非常有趣。其实这些
区块链在某种特征行业中已经非常成熟了
鸟类专家对此百思不得其解,直到美国一位做三维动画的从业人员,他刚好在《蝙蝠侠归来》的三维模型,发现了其中一个蝙蝠扇动翅膀细节,为了让每只蝙蝠飞舞的时候,不至于碰到隔壁蝙蝠的翅膀,保持一定距离,他在其中加入了一种简单的算法。从而发
发表于 05-15 09:58
•427次阅读
新型折纸软体机器人,可以通过折叠翅膀实现空中跳跃或爬行
4月15日消息,韩国首尔国立大学软机器人研究中心制造了一种机器人,该机器人使用一对翅膀打开飞行并像真正的瓢虫一样快速锁定。
Festo最新仿生机器鸟,可以利用人工羽毛实现飞行
和控制部件、无线电和定位技术、一个无刷电机、两个伺服装置、一个电池和变速箱。该机器鸟可以利用人工羽毛飞行。研究人员利用基于无线电的室内GPS与超宽带技术,以真实鸟类的羽毛为模型,让机械鸟
扇动万亿级市场的翅膀—传感器
来源:罗姆半导体社区 01 传感器是物联网发展的基石 雷军说过这样一句名言:“站在风口处,猪也能飞起来,长出一个小翅膀,就能飞得更高”。随着工信部在6月6号发放5G正式商用牌照,5G的到来





 工商网监
工商网监
评论