 聊聊3D激光SLAM开源算法-LeGo-LOAM
聊聊3D激光SLAM开源算法-LeGo-LOAM
SLAM技术从大的类别来讲,可以分为激光SLAM和视觉SLAM,激光SLAM建图精度高,但是激光雷达价格比较贵,视觉SLAM的性能目前还和激光SLAM有一定差距,然而相机成本低,也在快速发展之中。激光SLAM相对更成熟一点,门槛也更高一点。
从哪里开始学起,怎样才能更高效的学习,进入相关企业需要达到什么样的要求,这也是很多初学者面临的难题。
根据小编的多年经验,总结了三点:首先,要有扎实的数学基础;其次,要对整个SLAM大框架及细节部分理解到一定深度;再次,要有比较高度的编程能力。这三点都绝非易事,需要花很大的功夫,中间也有不少弯路要走。所以这门课程的推出,一方面是带领大家入门基于LeGo-LOAM框架的3D激光SLAM技术,另一方面是教大家高效的SLAM学习方法。LeGo-LOAM在工业中有非常广泛的应用,也是应聘者必须掌握的框架。
相对于LOAM算法,LeGo-LAOM能够进行地面优化,同时保证了轻量级,也加入了回环检测模块。本课程从必备的数学知识,到算法框架、源码,再到最后的实践,力求衔接清晰,通俗易懂,便于大家消化吸收。
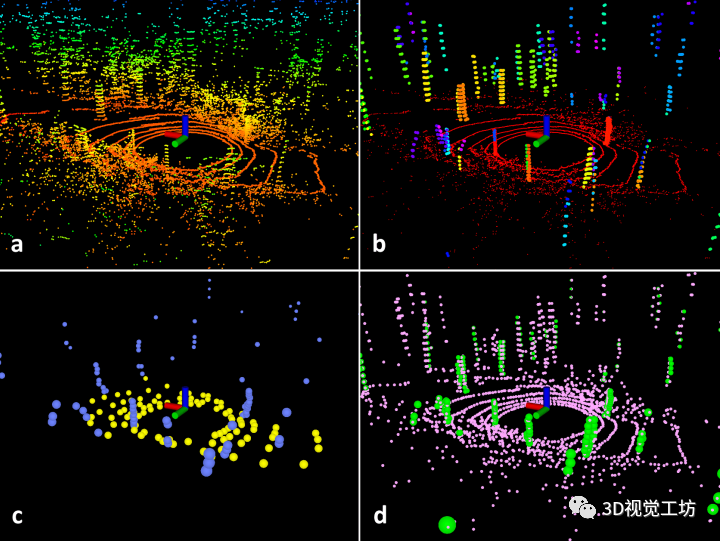
LeGo-LOAM地面优化
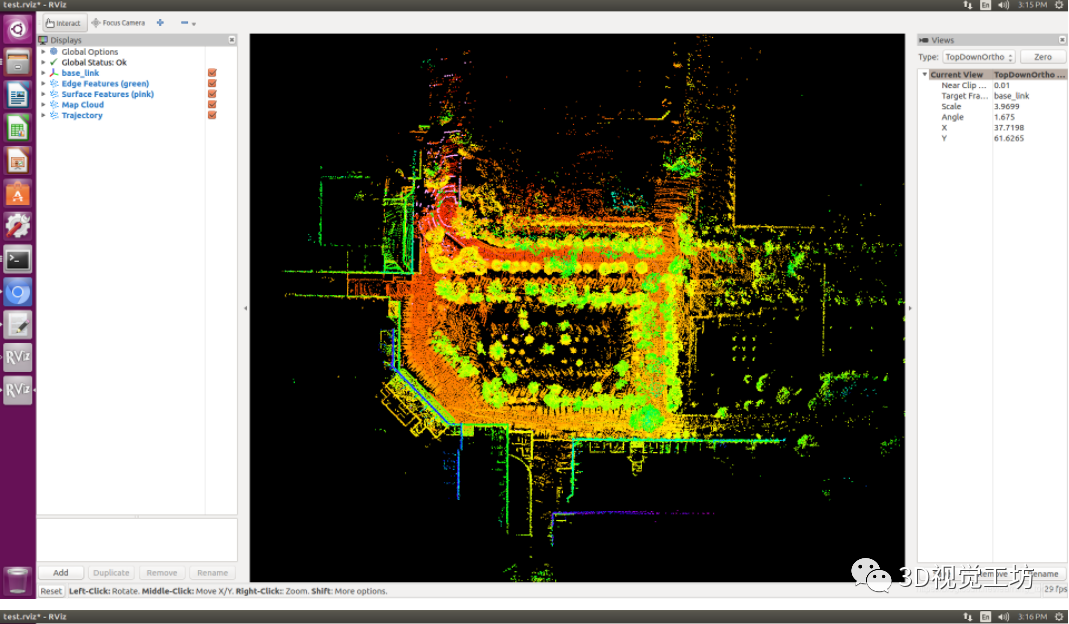
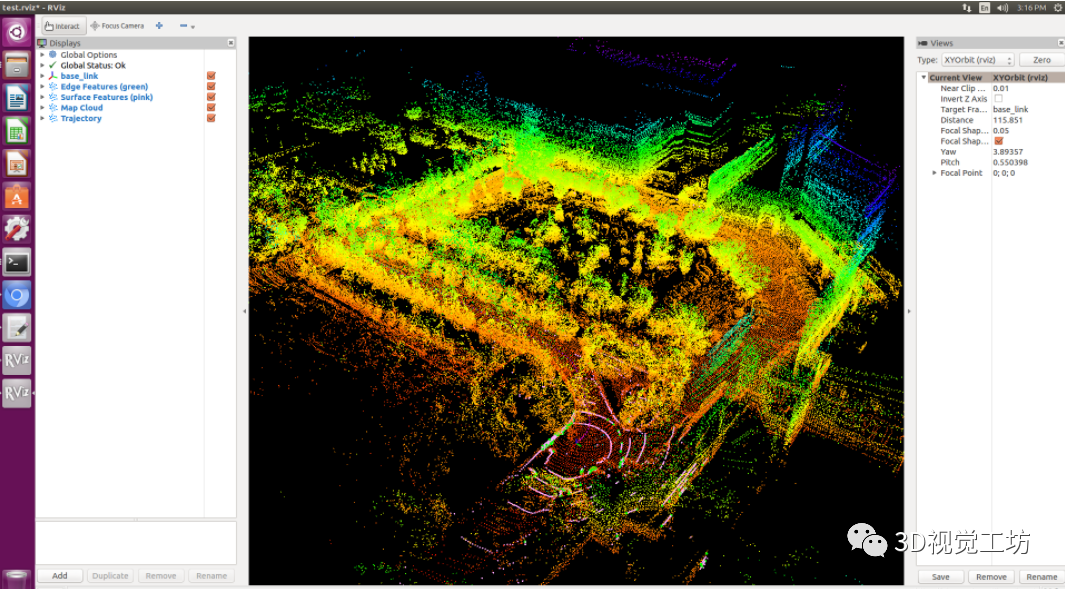
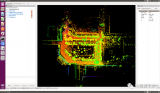
LeGO-LOAM运行效果展示:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
SLAM
+关注
关注
23文章
423浏览量
31822 -
3D激光
+关注
关注
0文章
30浏览量
7465
原文标题:聊聊3D激光SLAM开源算法-LeGo-LOAM
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
5 款激光雷达:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-128
ABI Research认为,2019 年就会有固态激光雷达解决方案问世,到 2027 年市场规模就会扩张至 130 亿美元。总结了目前市面上 5 款激光雷达:iDAR、高清3D
发表于 07-26 20:45
3D激光雷达SLAM技术的应用趋势
算法框架和关键模块, 分析阐述了近年来的研究热点问题和未来发展趋势, 梳理了3D激光雷达 SLAM 算法性能的评估标准, 并据此选取目前较为
测试的SLAM方案
在实验中,hdl_graph_slam和BLAM在所有数据集上的性能均不理想,因而下面不再讨论。而SC-LeGo-LOAM的性能较之LeGo-LOAM也没有明显改善,因而下面也不再讨论。
发表于 08-03 10:46
•1471次阅读
用于3D激光雷达SLAM回环检测的实时词袋模型BoW3D
Lego-LOAM是基于轨迹位姿方法的回环检测,使用KDtree寻找当前位姿的历史最近位姿,之后把历史位姿作为候选,用ICP算法修正位姿。
多智能体协同感知 协同动态调度决策的系统
本篇介绍一个多智能体协同感知,协同动态调度决策的系统。系统包括基于3D点云的SLAM建图(lego-loam),3维定位(hdl_localization),
发表于 04-11 10:36
•1次下载

基于LeGo-LOAM框架的激光SLAM技术解析
相对于LOAM算法,LeGo-LAOM能够进行地面优化,同时保证了轻量级,也加入了回环检测模块。本课程从必备的数学知识,到算法框架、源码,再到最后的实践,力求衔接清晰,通俗易懂,便于大
发表于 06-09 15:20
•211次阅读
详解激光SLAM框架LeGO-LOAM
LeGO-LOAM全称为:Lightweight and Groud-Optimized Lidar Odometry and Mapping on Variable Terrain,从标题可以看出 LeGO-LOAM 为应对可变地面进行了地面优化,同时保证了轻量级。
3D激光SLAM是用LOAM还是LeGo-LOAM?
激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有举足轻重的地位。

基于LeGo-LOAM框架的3D激光SLAM技术
激光SLAM很多人都觉得很难,对于初学者更是不知道从哪里开始学起,怎样才能更高效的学习,进入相关企业需要达到什么样的要求,这也是很多初学者面临的难题。如果掌握了3D激光
3D激光SLAM,为什么要选LeGo-LOAM?
对于学术研究而言,LeGo-LOAM是激光SLAM的经典框架,LeGo-LOAM源码简洁清晰,比LOAM

不同3D激光SLAM方案对比分析
在实验中,hdl_graph_slam和BLAM在所有数据集上的性能均不理想,因而下面不再讨论。而SC-LeGo-LOAM的性能较之LeGo-LOAM也没有明显改善,因而下面也不再讨论。
发表于 08-28 11:47
•632次阅读
对于3D激光SLAM,LeGo-LOAM到底有多重要?
激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有举足轻重的地位。下面的表格是近年来LOAM系列

中强光智能3D激光SLAM无人叉车技术特点详解
中强光智能自主研发的3D激光SLAM无人叉车KSRB1425由智能3D激光导航出发,结合视觉及多项感知融合技术,搭配先进的演算能力,实现智能
基于深度学习的LiDAR SLAM框架(DeepPointMap)
定位准确性:与六种最新的里程计和SLAM方法进行比较,包括KISS-ICP、LeGO-LOAM、SC-LeGO-LOAM、MULLS、CT-ICP和GeoTransformer。在SemanticKITTI、KITTI-360和
发表于 12-29 11:48
•1169次阅读







 工商网监
工商网监
评论