 详解激光SLAM框架LeGO-LOAM
详解激光SLAM框架LeGO-LOAM
LOAM存在的问题
LeGO-LOAM全称为:Lightweight and Groud-Optimized Lidar Odometry and Mapping on Variable Terrain,从标题可以看出 LeGO-LOAM 为应对可变地面进行了地面优化,同时保证了轻量级。 LeGO-LOAM是专门为地面车辆设计的SLAM算法,要求在安装的时候Lidar能以水平方式安装在车辆上;如果是倾斜安装的话,也要进行位姿转换到车辆上。
而LOAM对Lidar的安装方式没有要求,即使手持都没有关系。 作者的实验平台是一个移动小车(UGA),挂载了一个Velodyne VLP-16 线激光雷达,还配有一个低精度的 IMU;选用的硬件平台是 Nvidia Jetson TX2(ARM Cortex-A57 CPU);整体负载是 20Kg;移动速度为:2.0m/s;测试场景为:地面不平(比较颠簸)的草地。
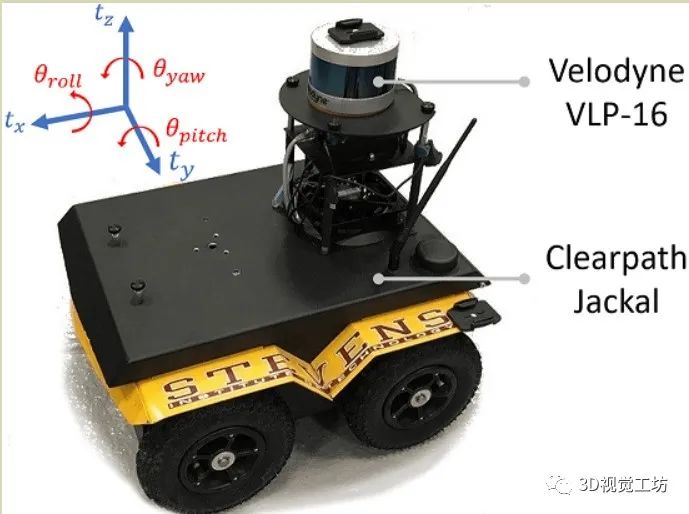
图1 硬件平台 LOAM框架在这样的硬件环境和使用场景中会存在一些问题:
由于搭载的是嵌入式系统,计算能力将会受限,LOAM的计算需要将难以满足,致使无法做到实时;
如果使用LOAM框架,系统计算每个点曲率的处理频率(数据量很大,VLP-16一条线是1800个点)将难以跟上传感器的更新频率;
UGA行驶的路面是非平滑连续的(运动是颠簸的),采集的数据将会失真(运动畸变,匀速运动模型无法适用于颠簸场景),使用LOAM很难在两帧之间找到可靠的特征对应。
在噪杂的环境中操作UGV也会给LOAM带来一些挑战,例如:浮动的草丛和摆动的树叶的点云将被误提取为角点或面点,这些特征是不可靠的,难以在连续帧之间获取准确的匹配,从而会造成较大的漂移。
LeGO-LOAM的设计思路
对地面点云的配准主要使用的是面点特征;在分割后的点云配准主要使用的是边缘点和面点特征。从中可以看出使用边缘点的数量是要远小于平面点的数量,这也是能实现加速的主要原因。
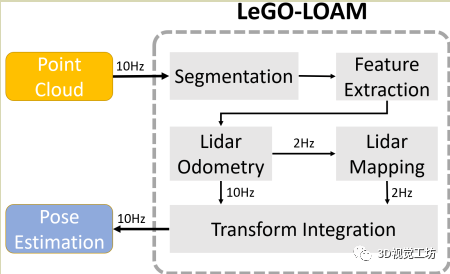
LeGO_LOAM的软件系统输入 3D Lidar 的点云,输出 6 DOF 的位姿估计。整个软件系统分为 5 个部分:
第一部分:Segmentation: 这一部分的主要操作是分离出地面点云;同时对剩下的点云进行聚类,滤除数量较少的点云簇。
第二部分:Feature Extraction: 对分割后的点云(已经分离出地面点云)进行边缘点和面点特征提取,这一步和LOAM里面的操作一样。
第三部分:Lidar 里程计: 在连续帧之间进行(边缘点和面点)特征匹配找到连续帧之间的位姿变换矩阵。
第四部分:Lidar Mapping: 对feature进一步处理,然后在全局的 point cloud map 中进行配准。
第五部分:Transform Integration: Transform Integration 融合了来自 Lidar Odometry 和 Lidar Mapping 的 pose estimation 进行输出最终的 pose estimate。
LeGO-LOAM的算法细节
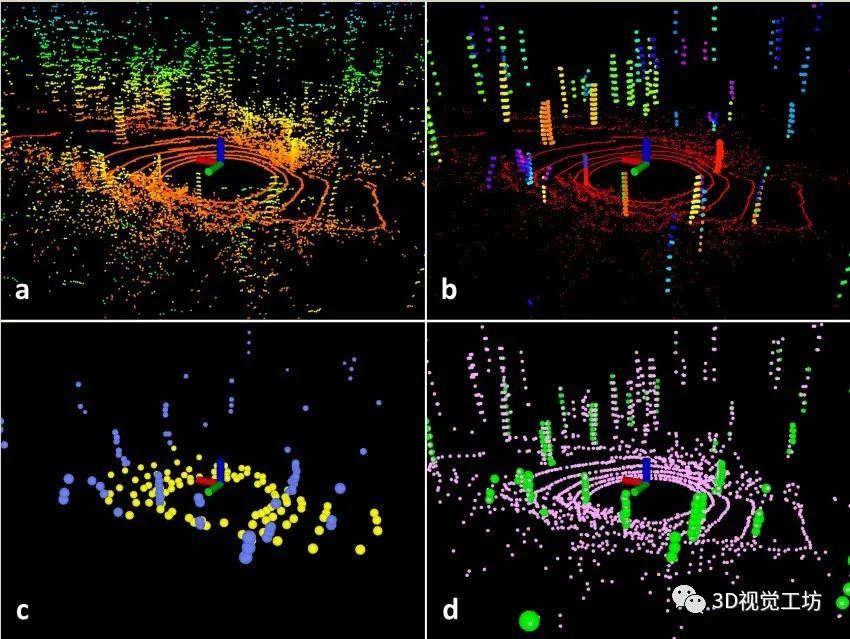
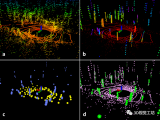
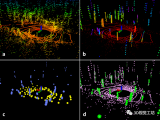
图3 噪声环境中一条scan的特征提取过程

A. Segmentation
提取地面点之后,再对剩下的距离图像进行聚类(分簇),过滤掉点云数量小于 30 的点云簇,对保留下来的点云簇分配不同的标签。地面点云属于特殊的一类点云簇(一开始我们就提取出来了)。对点云进行聚类再处理,可以提高运行效率和提取更稳定的特征。
例如,小车运行于嘈杂的环境,树叶将会产生不可靠的特征,相同的叶子不太可能在连续两帧扫描中看到。图3(a)是原始点云,包含了很多植被点云;经过处理之后变成了图3(b),只剩下大物体点云,例如:树干。地面点云将被保留以作进一步处理。
此时,保留下来的每个点将具备三种属性:(1)点云的标签;(2)在距离图像中的行列数;(3)距离值。
B. Feature Extraction
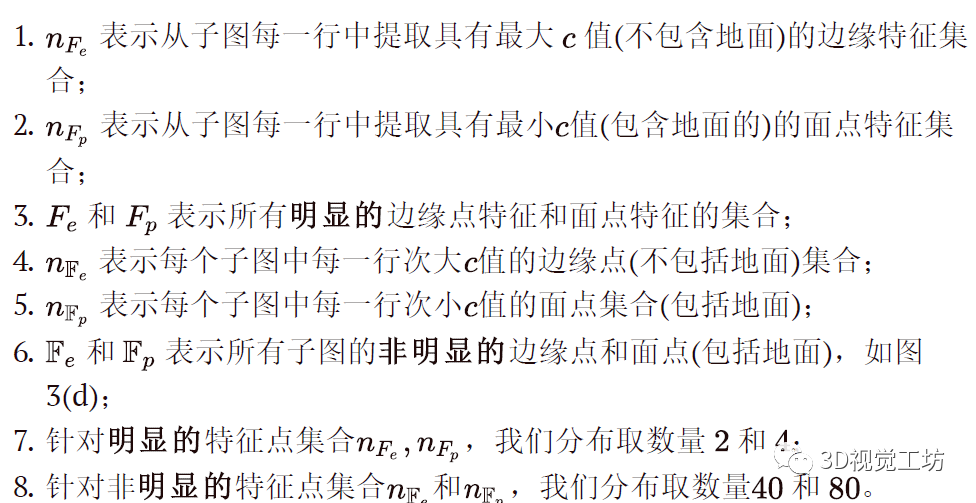
这一步主要是从地面点云和分割出来的点云中提取特征,与LOAM中的操作一样。主要要搞清楚几个特征点集合的概念。
为了从各个方向均匀地提取特征,我们将距离图像水平分割成几个相等的子图像,将360°均匀分成6等分,每一等分的精度是 300 imes 16(因为VLP-16线Lidar,一条scan是1800个点)。
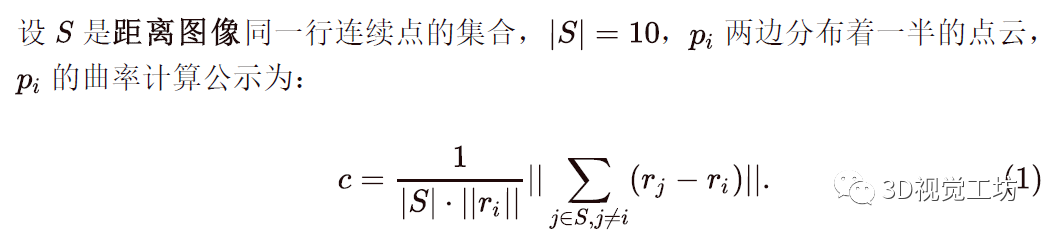
计算子图中每一行的点的曲率值,对曲率值进行排序分类,> Cth,分为边缘点特征;< Cth 分为面点特征。设置以下几个集合(论文中这部分语句相近,以下是我个人的理解,可能不准确):
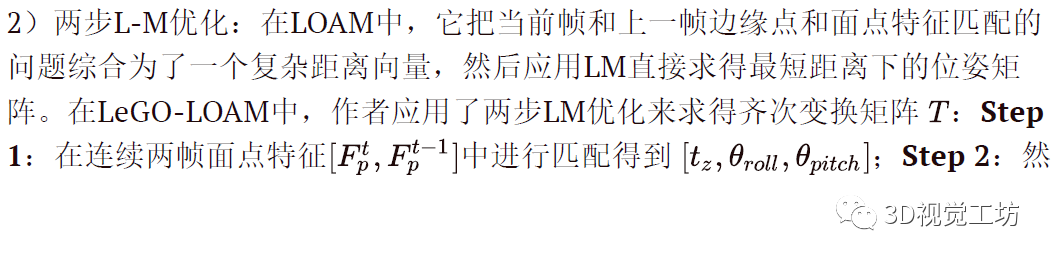
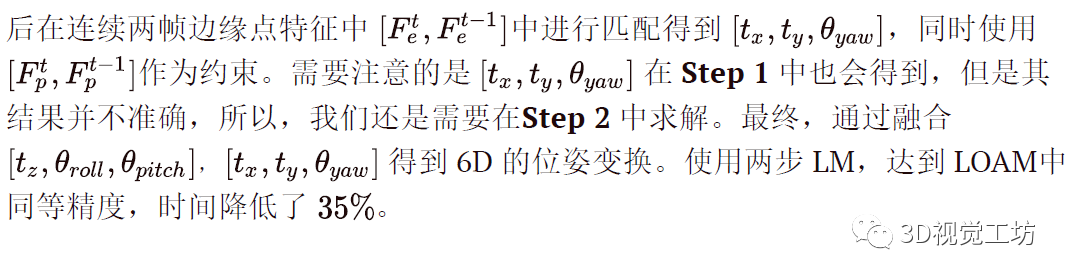
C. Lidar Odometry
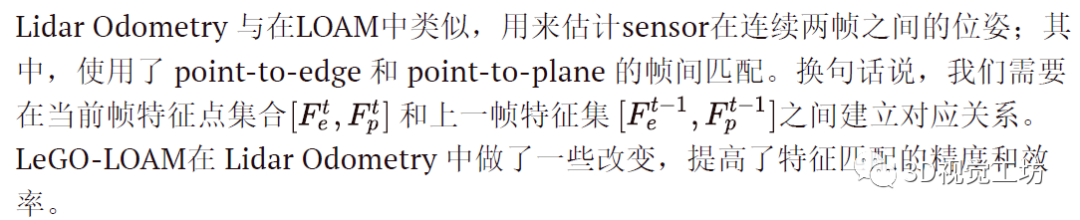
1)Label Matching:LeGO-LOAM对点云进行了聚类分簇,不同的点云簇具有不同的Label。Label 信息可以作为两帧匹配的约束条件,连续两帧之间只有同类标签点云簇才能进行配准。这种方式可以提高配准的精度和效率。
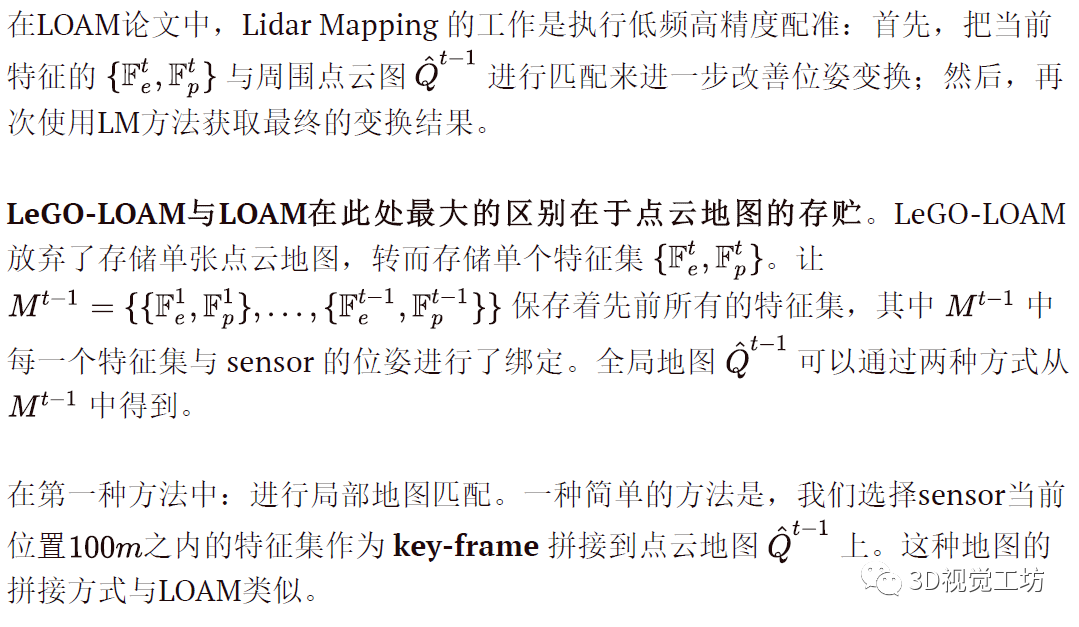
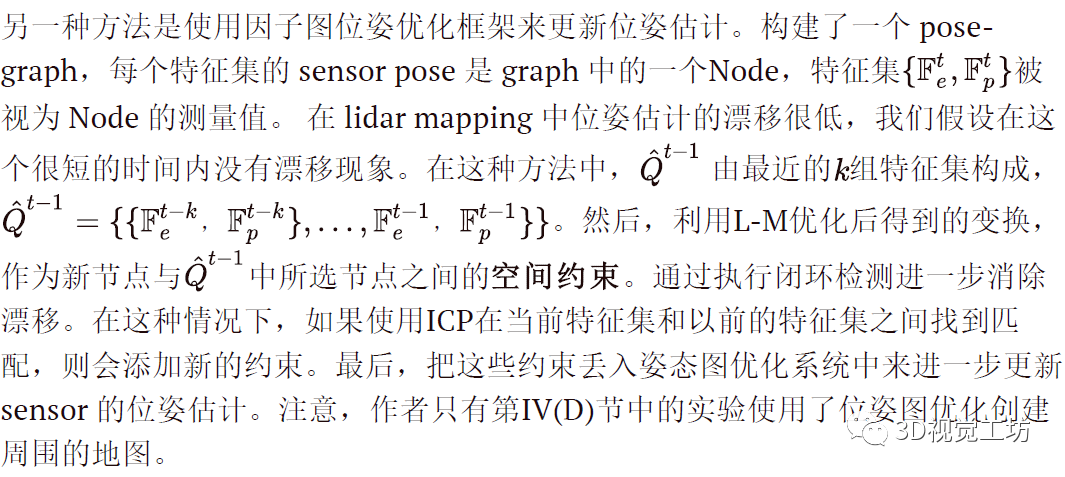
D. Lidar Mapping
LeGO-LOAM的性能表现
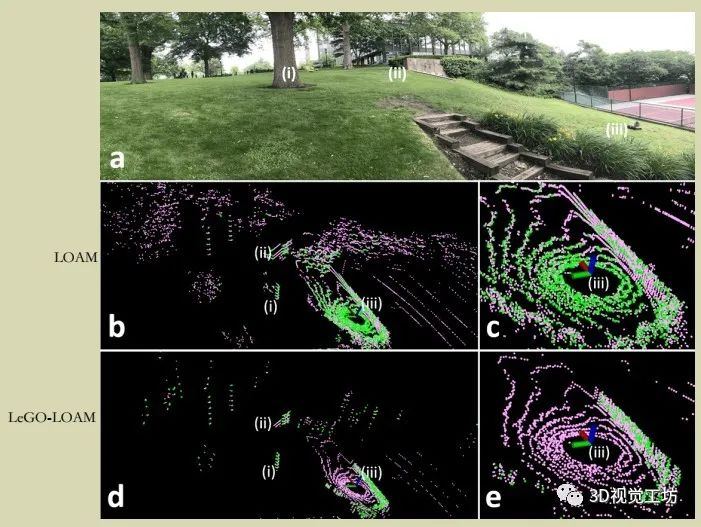
作者为测试LeGO-LOAM的性能,设计了一系列的实验来对比LeGO-LOAM和LOAM的表现性能。 作者在户外的小场景和大场景中,分别对LeGO-LOAM和LOAM测试平台执行激烈和平缓的控制,来查看两者的建图效果和效率。 在小场景的激烈运动过程中:LOAM 会把草丛、树叶提取为边缘点特征(草丛和树叶是不稳定特征的主要来源);而LeGOU-LOAM会过滤掉这些不稳定的特征,只会在树干,地面,台阶等上提取稳定特征。如下图所示(绿色是边缘点,粉色是面点):
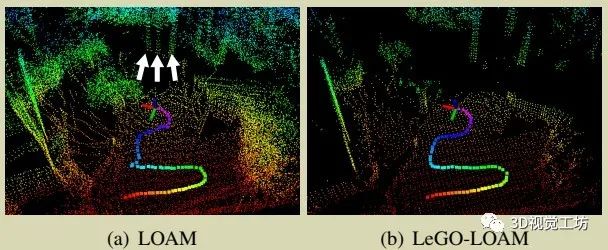
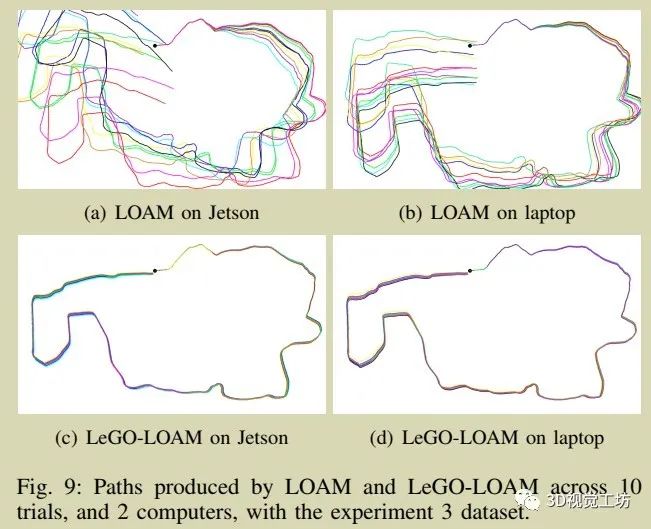
在LOAM框架中,剧烈的运动容易造成点云地图的发散,如下图中(a)LOAM,有三个树干。
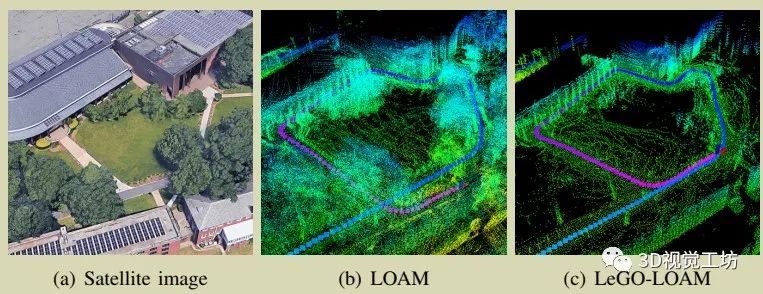
作者在大场景的都市环境(是一个学校,不同地点的海拔误差在19m之内)里也进行多种测试以验证建图的精度,有人行道,水泥路,土路和草丛。 LOAM 在人行道上的建图效果并不好,可能是一端存在树木叶子的干扰,如下图所示:
在其他三种场景中,LeGO-LOAM的偏差(终点相对于初始位置的偏差)表现都要优于LOAM。

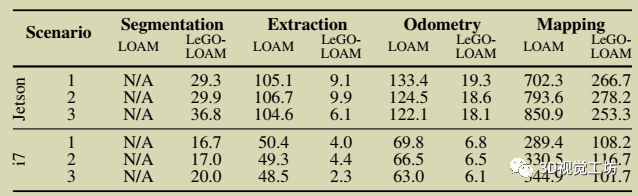
整个测试的结果如下:
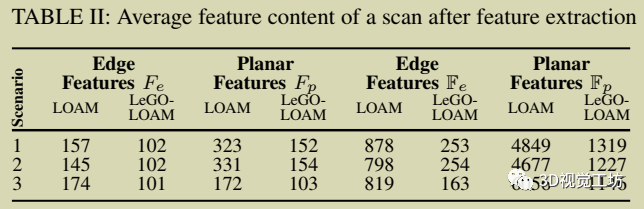
特征点数量对比:LeGO-LOAM特征点整体下降幅度超过:29%,40%,68%,72%。
迭代次数对比:里程计的迭代次数降低了34%,48%。
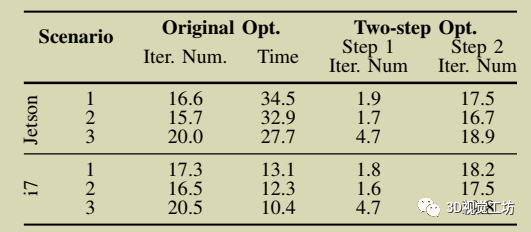
运行时间对比:降低了 60%
位姿误差对比:LeGOLOAM可以用更少的计算时间实现可比或更好的位置估计精度。
审核编辑:刘清
-
激光雷达
+关注
关注
969文章
4041浏览量
190544 -
IMU
+关注
关注
6文章
321浏览量
45959 -
Cortex-A57
+关注
关注
0文章
6浏览量
9253 -
SLAM算法
+关注
关注
0文章
11浏览量
2558
原文标题:一文详解激光SLAM框架LeGO-LOAM
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
激光SLAM与视觉SLAM有什么区别?
HOOFR-SLAM的系统框架及其特征提取
测试的SLAM方案
用于3D激光雷达SLAM回环检测的实时词袋模型BoW3D
基于LeGo-LOAM框架的激光SLAM技术解析
聊聊3D激光SLAM开源算法-LeGo-LOAM
3D激光SLAM是用LOAM还是LeGo-LOAM?

基于LeGo-LOAM框架的3D激光SLAM技术
3D激光SLAM,为什么要选LeGo-LOAM?

不同3D激光SLAM方案对比分析
对于3D激光SLAM,LeGo-LOAM到底有多重要?

视觉SLAM是什么?视觉SLAM的工作原理 视觉SLAM框架解读

基于深度学习的LiDAR SLAM框架(DeepPointMap)






 工商网监
工商网监
评论