 S7-200 SMART如何通过运动控制向导设置运动控制
S7-200 SMART如何通过运动控制向导设置运动控制
200 Smart的运动控制功能和1200(PTO)还是很有些不同,比如有零脉冲ZP信号,反向补偿,通过485读取驱动器位置。但是没有软限位,回零碰到硬限位开关自动反向功能,曲线表也不如工艺对象“命令表”(Command table)来的灵活。不过毕竟便宜特别配合samrt line触摸屏价格很有优势,所以在小型单机设备里面还是很受欢迎。
S7-200 SMART CPU提供了三种开环运动控制方法
脉冲串输出(PTO):内置在CPU的速度和位置控制。
(注意:无PTO向导可用。请用运动控制向导代替。)
脉宽调制(PWM):内置在CPU的速度、位置或负载循环控制。请参见脉冲输出指令。
运动轴:内置于CPU中,用于速度和位置控制
S7-200 SMART只能做开环运动和1200的PTO模式一样。前两种先不看,下面使用运动控制向导来看看第三种运动轴。
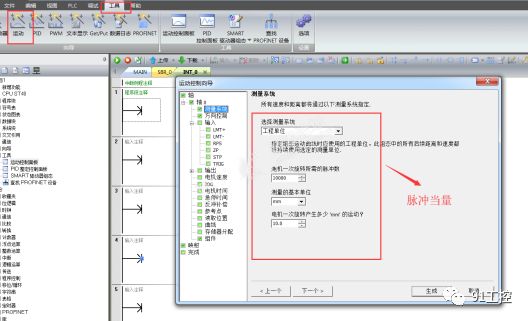
测量系统:就是设置脉冲当量。
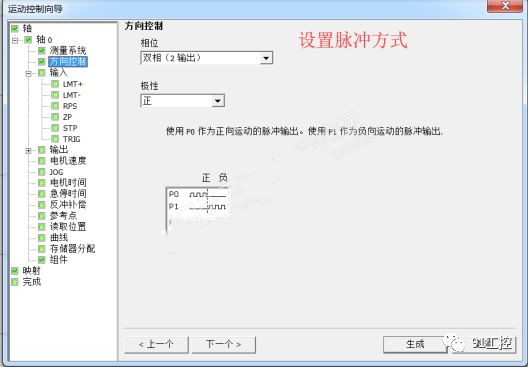
方向控制:选择脉冲类型和极性。脉冲类型有4种,脉冲+方向,正负脉冲,AB相和单脉冲
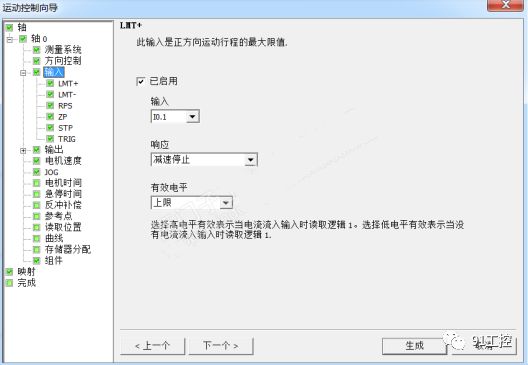
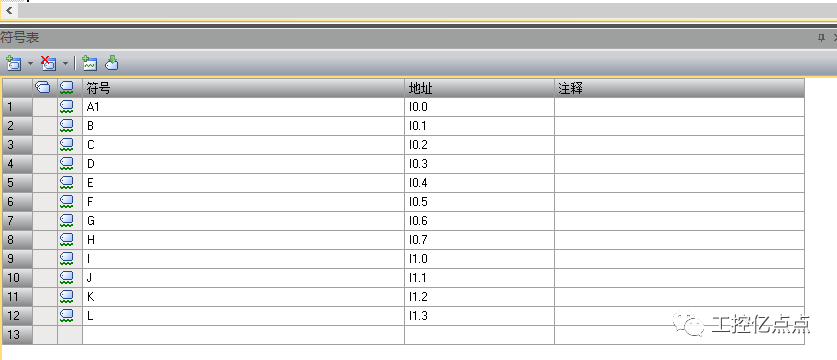
输入:分配输入点功能
LM+,LM-:硬限位开关
RPS:回参考点减速开关,
ZP:零脉冲(伺服电机转一圈编码器有一个零脉冲)需要接入高速口,1200直接把这个功能阉割掉了
STP:停止运动控制,感觉分配给急停用的。这个1200也没有
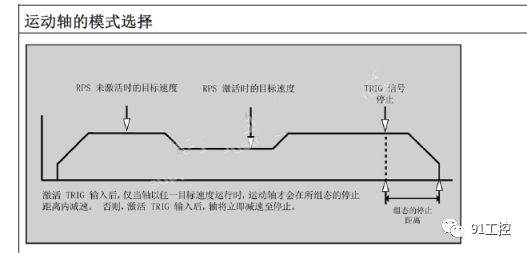
TRIG:用于双速连续旋转的时候触发停止用。这个1200还是没有
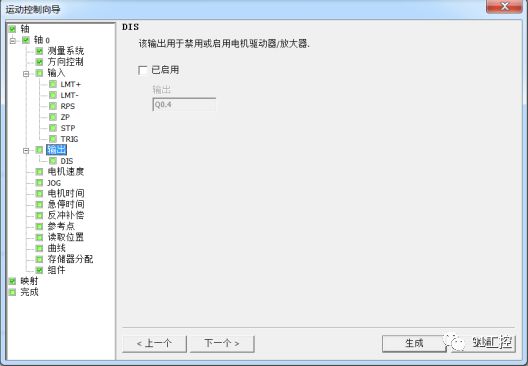
输出:分配输出口
DIS:用于控制伺服使能
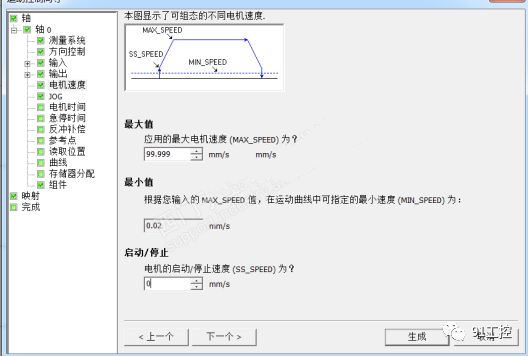
电机速度:设置最大最小和启动速度
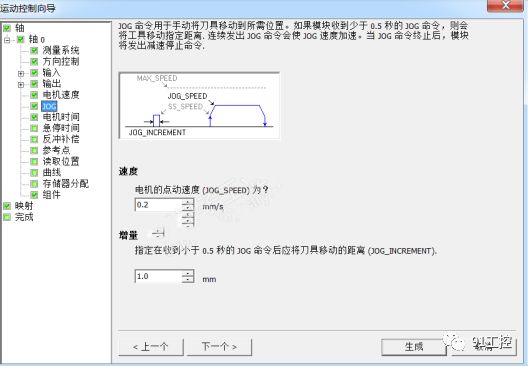
JOG:手动移动时候的速度和点动量
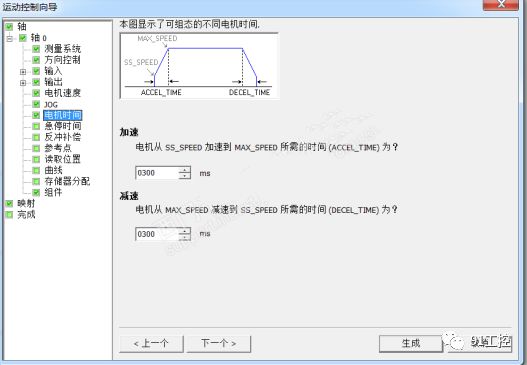
电机时间:加减速时间
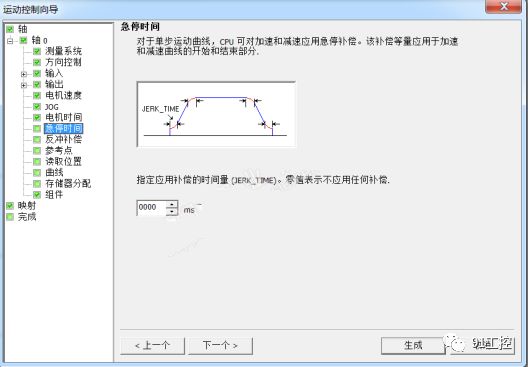
急停时间:急停延时停止的时间
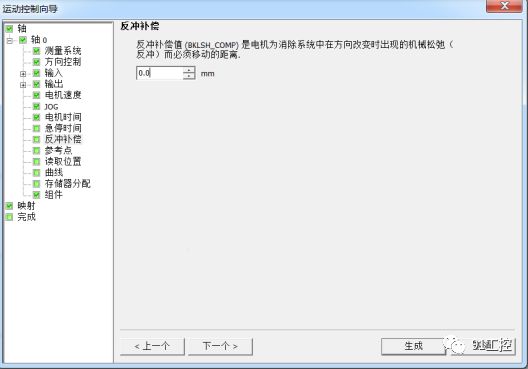
反冲补偿:我们通常叫做反向间隙,丝杠和螺母之间肯定存在一定的间隙,所以在正转后变换成反转的时候,在一定的角度内,尽管丝杠转动,但是丝母还要等间隙消除以后才能带动工作台运动,这个间隙就是反向间隙。通过这个功能可以补偿。
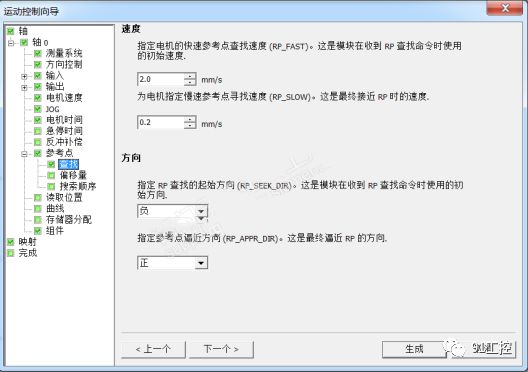
参考点寻参参数:包括查找回零开关信号(RPS)的速度和方向,找到开关后的慢速度找零脉冲的(ZP)的速度和方向
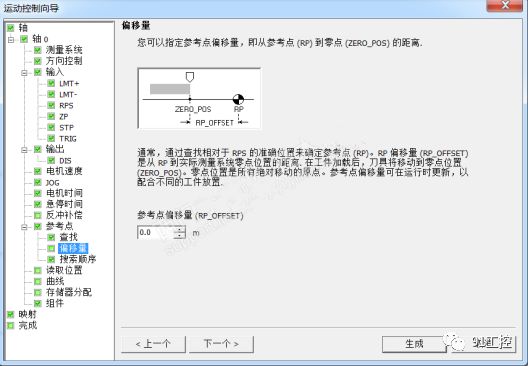
参考点偏移量:设置找到ZP机械零点,偏移到指定位置作为工件零点的位置
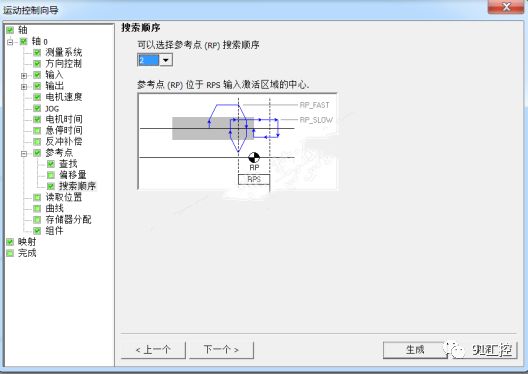
搜索顺序,4种回参考点方式,但是没有和1200那样的碰到硬限位开关自动返回的功能。
方式1,2完全靠回零开关RPS,1脱开回零开关的位置为零点,2压着回零开关的位置为零点。
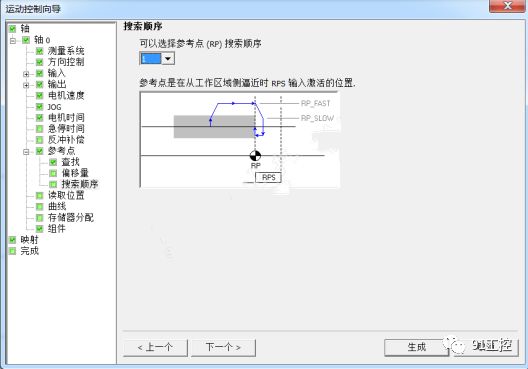
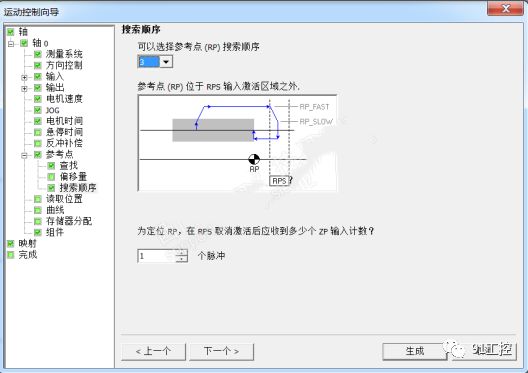
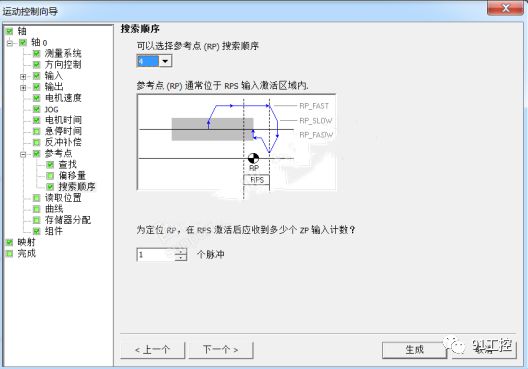
方式3,4,和1,2类似也是3是脱开回零开关找零点,4在回零开关上找零点。不同的是回零完成是靠零脉冲ZP信号的,同时通过设置ZP个脉冲数也可以达到偏移零点的效果
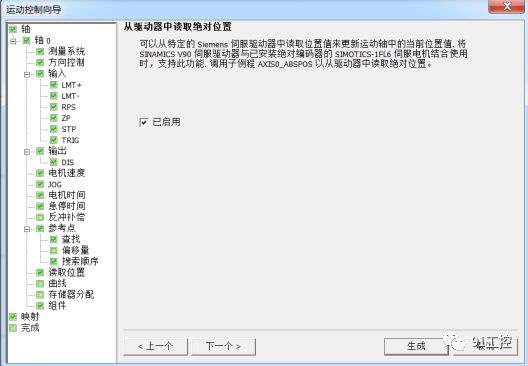
读取位置;通过485口可以读取驱动器的绝对位置。貌似1200没有现成的库
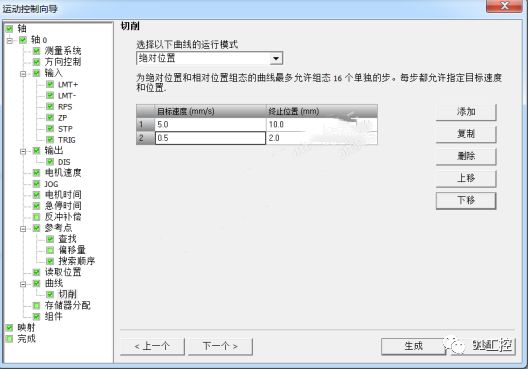
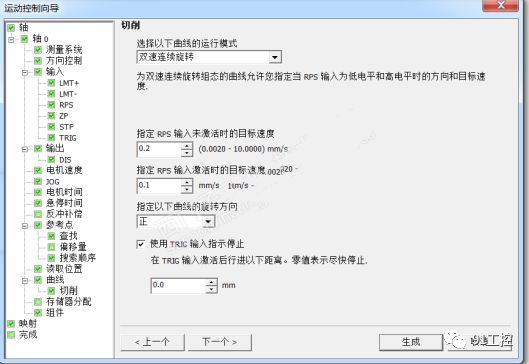
曲线:类似于1200的工艺对象“命令表”(Command table),每个轴可以定义32个曲线,每个曲线可以有16个步,但是一个曲线里面的步的只能是同一种运动模式,要么相对运动要么绝对运动。而不像1200的Command table中的每一步可以设置。
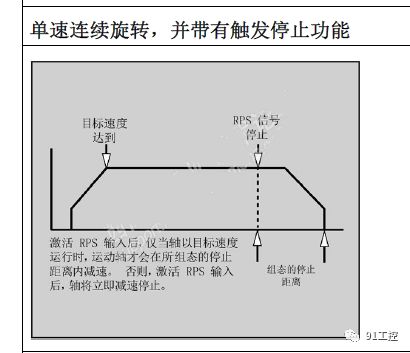
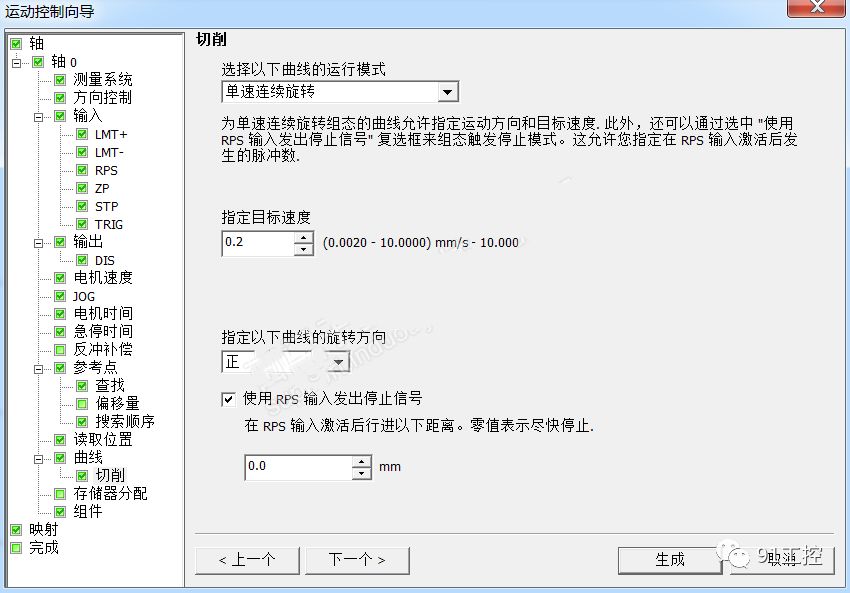
另外还有两种速度模式,分别是单速连续模式和双速连续模式。双速是通过输入点RPS信号点来切换速度的。同时两种模式都能通过输入点信号RPS来停止。快速的停止和速度切换1200直接可以超弛响应,samrt可能只能通过硬件I/O来完成吧
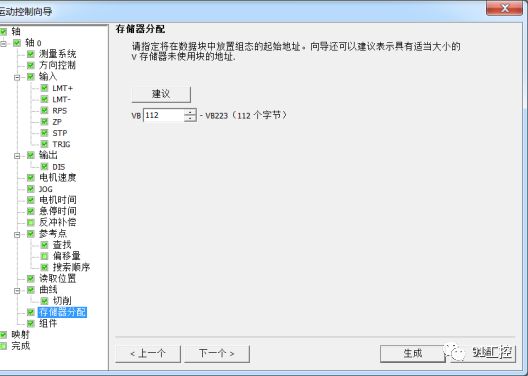
存储器分配:分配组态数据到VB块,选择建议的VB块
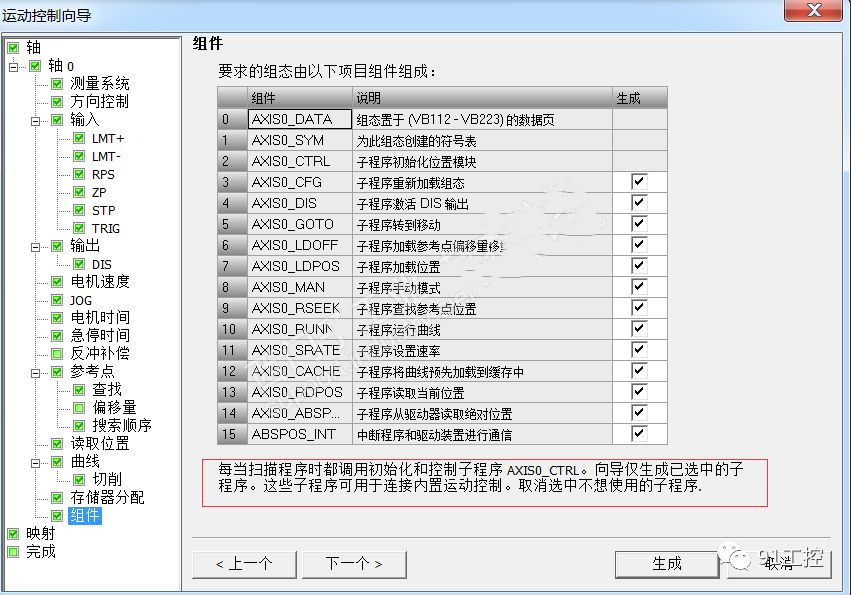
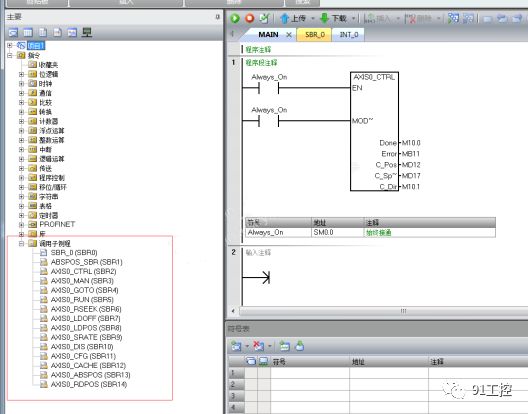
组件;选择需要的功能子程序,一般都是会全选的吧
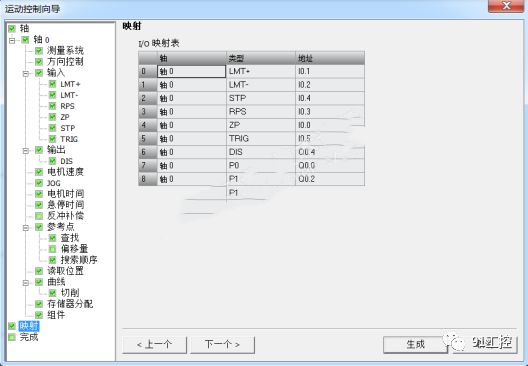
映射:上面组态过的硬件I/O列表
完成:因为Smart不支持FB,所以每个轴的功能都生产了对应轴的子程序。下面就可以开始编程了。
审核编辑:汤梓红
-
cpu
+关注
关注
68文章
10824浏览量
211104 -
SMART
+关注
关注
3文章
223浏览量
44656 -
运动控制
+关注
关注
4文章
564浏览量
32821 -
S7-200
+关注
关注
13文章
407浏览量
50321
原文标题:S7-200smart如何通过运动控制向导设置运动控制
文章出处:【微信号:中泰PLC自动化教学,微信公众号:中泰PLC自动化教学】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
S7-200SMART与S7-200的区别是什么
详细介绍S7-200 SMART运动向导的组态
S7-200 SMART运动向导组态详解
S7-200 SMART CPU固件更新V2.7
S7-200 SMART使用运动控制面板进行调试
S7-1500与S7-200 SMART的PROFINET IO通信配置

SIMATIC S7-200 SMART系统手册
如何在S7-200 SMART CPU断电重启后保持运动控制的当前位置值?






 工商网监
工商网监
评论