 [esp32教程] 5、UART使用
[esp32教程] 5、UART使用
0、前期准备
1、参考首篇文章搭建好esp32环境
2、准备好一块esp32开发开发板(本作者使用了esp32c3作为开发平台)
1、知识储备
1.1 概述
UART称为通用异步收发器,可以进行全双工/半双工数据通讯数据通讯,通讯距离取决于上拉驱动能力、波特率,一般只在电路板上使用,如果需要长距离通讯可以外接RS232(最长通讯距离15M)、RS485电平转换芯片,但是要注意如果外接的是RS485电平芯片,只能进行半双工通讯,在理想情况下使用9600波特率,其通讯距离可达1200M。
1.2 功能架构
乐鑫EPS32C3带有2个UART控制器,不仅可以用来进行数据通讯,还能来用驱动红外发射管。(目前本文只用来作uart通讯)
1.3 uart配置流程介绍
LEDC的配置流程可分为以下3步
1、uart配置:设置波特率、数据位、停止位、奇偶校验位和流控
2、引脚绑定:设置UART使用哪几个引脚
3、 注册uart中断驱动(可选--建议进行该配置,本文给出例子就使用该方式)
1、uart配置
uart的配置主要是给 uart_config_t 结构体赋值,然后通过uart_param_config函数进行uart设置
以下对uart_config_t 结构体进行说明
typedef struct {
int baud_rate; //波特率
uart_word_length_t data_bits; //数据位
uart_parity_t parity; //奇偶校验位
uart_stop_bits_t stop_bits; //停止位
uart_hw_flowcontrol_t flow_ctrl; //硬件流控
uint8_t rx_flow_ctrl_thresh; //硬件流控的RTS阈值
union {
uart_sclk_t source_clk; //时钟源
bool use_ref_tick __attribute__((deprecated));
};
} uart_config_t;
例子:
// uart1配置
// 115200 8 1 无奇偶校验位 无流控
uart_config_t uart_conf = {
.baud_rate = 115200,
.data_bits = UART_DATA_8_BITS,
.stop_bits = UART_STOP_BITS_1,
.parity = UART_PARITY_DISABLE,
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE,
.source_clk = UART_SCLK_APB,
};
uart_param_config(UART_NUM_1, &uart_conf);
2、引脚绑定
设置UART使用哪几个引脚
esp_err_t uart_set_pin(uart_port_t uart_num, int tx_io_num, int rx_io_num, int rts_io_num, int cts_io_num);
// 参数 :uart_num:串口编号 可查看uart.h,进行选择
// tx_io_num:发送引脚编号,不需要可填:UART_PIN_NO_CHANGE
// rx_io_num: 接收引脚编号,不需要可填:UART_PIN_NO_CHANGE
// rts_io_num:rts引脚编号,不需要可填:UART_PIN_NO_CHANGE
// cts_io_num:cts引脚编号,不需要可填:UART_PIN_NO_CHANGE
例子:
// 引脚绑定
uart_set_pin(UART_NUM_1, TX_PIN, RX_PIN, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
3、 注册uart中断驱动(配置可选)
通过注册uart中断,可以不用开一个任务实时的去读取串口,判断串口有没有数据发送过来,提高系统实时性。
中断驱动uart_driver_install函数参数说明如下:
esp_err_t uart_driver_install(uart_port_t uart_num, int rx_buffer_size, int tx_buffer_size, int queue_size, QueueHandle_t *uart_queue, int intr_alloc_flags);
// 参数 :uart_num:串口编号 可查看uart.h,进行选择
// rx_buffer_size:uart接收数组大小
// tx_buffer_size: uart发送数组大小
// queue_size: uart接收消息队列大小,和新建的消息队列大小一致
// uart_queue:uart接收消息队列句柄
// intr_alloc_flags:中断标志位
例子:
QueueHandle_t uart_queue = NULL;
uart_queue = xQueueCreate(8, 512);
uart_driver_install(UART_PORT, RX_BUFF_SIZE, RX_BUFF_SIZE, 8, &uart_queue, 0);
4、 其他函数
本文只介绍发送和接收两个函数,更多函数可参考乐鑫官网
int uart_read_bytes(uart_port_t uart_num, void *buf, uint32_t length, TickType_t ticks_to_wait);
//参数 : uart_num:串口编号 可查看uart.h,进行选择
// buf:接收数组名
// length:接收到的数据长度
// ticks_to_wait:读取等待的RTOS 滴答个数
//返回 : -1:表示错误
// 其他:表示从uart的接收fifo读取到的数据
int uart_write_bytes(uart_port_t uart_num, const void *src, size_t size);
//参数 : uart_num:串口编号 可查看uart.h,进行选择
// src:发送数组名
// size:发送的数据长度
//返回 : -1:表示错误
// 其他:表示uart发送给发送fifo的数据
2、新建工程
idf.py create-project project_uart # 新建工程
cd project_uart
idf.py set-target esp32c3 # 设置工程使用的芯片
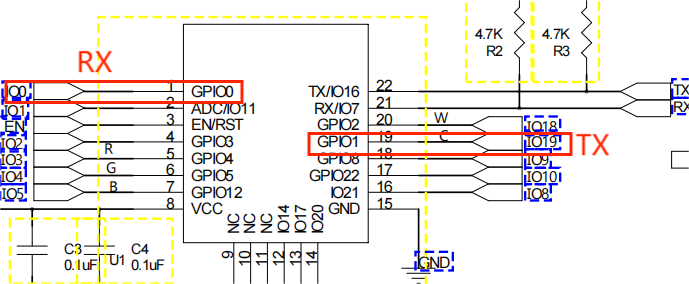
2、查看原理图确定uart引脚
3、编写程序
#include < freertos/FreeRTOS.h >
#include < freertos/queue.h >
#include < freertos/task.h >
#include < driver/gpio.h >
#include < driver/uart.h >
#include < esp_log.h >
#include < string.h >
#define LOG_EVENT_TAG "uart"
QueueHandle_t uart_queue = NULL;
#define RX_BUFF_SIZE 1024
#define UART_PORT UART_NUM_2
#define RX_PIN GPIO_NUM_1
#define TX_PIN GPIO_NUM_0
uint8_t uart_buff[RX_BUFF_SIZE];
void UartEventHandle(void* param);
void init_uart(void) {
uart_config_t uart_conf = {
.baud_rate = 115200,
.data_bits = UART_DATA_8_BITS,
.stop_bits = UART_STOP_BITS_1,
.parity = UART_PARITY_DISABLE,
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE,
.source_clk = UART_SCLK_APB,
};
uart_param_config(UART_PORT, &uart_conf);
uart_set_pin(UART_PORT, TX_PIN, RX_PIN, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
uart_queue = xQueueCreate(8, 512);
uart_driver_install(UART_PORT, RX_BUFF_SIZE, RX_BUFF_SIZE, 8, &uart_queue, 0);
xTaskCreate(UartEventHandle, "uart_event_hanle", 1024, NULL, 5, NULL);
}
void UartEventHandle(void* param) {
uart_event_t event;
memset(&uart_data, 0, sizeof(UartData));
uart_data.rx_status = pdFALSE;
while (pdTRUE) {
if (xQueueReceive(uart_queue, (void*)&event, portMAX_DELAY)) {
switch (event.type) {
case UART_DATA:
memset(&uart_data, 0, sizeof(UartData));
uart_data.rx_status = pdFALSE;
if (event.size <= sizeof(uart_data.buff)) {
uart_data.rx_status = pdTRUE;
uart_data.rx_uart_len = event.size;
uart_read_bytes(UART_PORT, uart_buff, event.size, portMAX_DELAY);
ESP_LOGI(LOG_EVENT_TAG, "uart_buff: %s", uart_buff);
}
break;
case UART_FIFO_OVF:
case UART_BUFFER_FULL:
uart_flush_input(UART_PORT);
xQueueReset(uart_queue);
break;
default:
ESP_LOGI(LOG_EVENT_TAG, "uart event type: %d", event.type);
break;
}
}
}
}
void app_main(void) {
init_uart();
while (1) {
vTaskDelay(1000 / portTICK_RATE_MS);
}
}