 函数进阶与按键(1)
函数进阶与按键(1)
用户与单片机之间的信息交互需要依赖于两类设备:输入设备和输出设备。前边讲的LED小灯、数码管、点阵都是输出设备,本章我们就来学习一下最常用的输入设备——按键,同时还会学到一些硬件电路的基础知识与C语言函数的一些进阶知识。
8.1 单片机最小系统解析
8.1.1 电源
我们在学习过程中,很多指标都是直接用的概念指标,比如我们说+5V代表1,GND代表0等等。但在实际电路中的电压值并不是完全精准的,那这些指标允许范围是什么呢?随着我们所学的内容不断增多,大家要慢慢培养一种阅读数据手册的能力。
比如,我们要使用STC89C52RC单片机的时候,找到它的数据手册第11页,看第二项——工作电压:5.5V~3.4V(5V单片机),这个地方就说明这个单片机正常的工作电压是个范围值,只要电源VCC在5.5V~3.4V之间都可以正常工作,电压超过5.5V是绝对不允许的,会烧坏单片机,电压如果低于3.4V,单片机不会损坏,但是也不能正常工作。而在这个范围内,最典型、最常用的电压值就是5V,这就是后面括号里“5V单片机”这个名称的由来。除此之外,还有一种常用的工作电压范围是2.7V~3.6V、典型值是3.3V的单片机,也就是所谓的“3.3V单片机”。日后随着大家接触更多的器件,对这点会有更深刻的理解。
现在我们再顺便多了解一点,大家打开74HC138的数据手册,会发现74HC138手册的第二页也有一个表格,上边写了74HC138的工作电压范围,最小值是4.75V,额定值是5V,最大值是5.25V,可以得知它的工作电压范围是4.75V~5.25V。这个地方讲这些目的是让大家清楚的了解,我们获取器件工作参数的一个最重要、也是最权威的途径,就是查阅该器件的数据手册。
8.1.2 晶振
晶振通常分为无源晶振和有源晶振两种类型,无源晶振一般称之为crystal(晶体),而有源晶振则叫做oscillator(振荡器)。
有源晶振是一个完整的谐振振荡器,它是利用石英晶体的压电效应来起振,所以有源晶振需要供电,当我们把有源晶振电路做好后,不需要外接其它器件,只要给它供电,它就可以主动产生振荡频率,并且可以提供高精度的频率基准,信号质量也比无源信号要好。
无源晶振自身无法振荡起来,它需要芯片内部的振荡电路一起工作才能振荡,它允许不同的电压,但是信号质量和精度较有源晶振差一些。相对价格来说,无源晶振要比有源晶振价格便宜很多。无源晶振两侧通常都会有个电容,一般其容值都选在10pF~40pF之间,如果手册中有具体电容大小的要求则要根据要求来选电容,如果手册没有要求,我们用20pF就是比较好的选择,这是一个长久以来的经验值,具有极其普遍的适用性。
有源晶振通常有4个引脚,VCC,GND,晶振输出引脚和一个没有用到的悬空引脚(有些晶振也把该引脚作为使能引脚)。无源晶振有2个或3个引脚,如果是3个引脚的话,中间引脚接是晶振的外壳,使用时要接到GND,两侧的引脚就是晶体的2个引出脚了,这两个引脚作用是等同的,就像是电阻的2个引脚一样,没有正负之分。对于无源晶振,用我们的单片机上的两个晶振引脚接上去即可,而有源晶振,只接到单片机的晶振的输入引脚上,输出引脚上不需要接,如图8-3和图8-4所示。
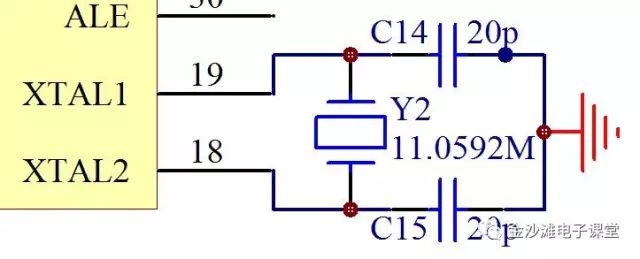
图8-3 无源晶振接法
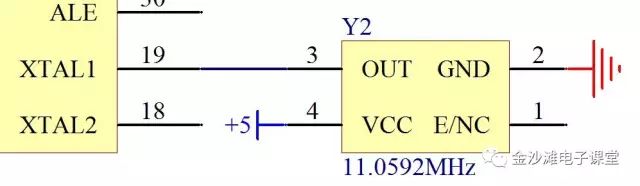
图8-4 有源晶振接法
8.1.3 复位电路
我们先来分析一下KST-51开发板上的复位电路,如图8-5所示。
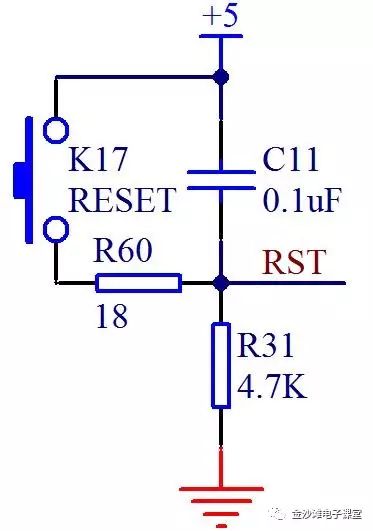
图8-5 单片机复位电路
当这个电路处于稳态时,电容起到隔离直流的作用,隔离了+5V,而左侧的复位按键是弹起状态,下边部分电路就没有电压差的产生,所以按键和电容C11以下部分的电位都是和GND相等的,也就是0V。我们这个单片机是高电平复位,低电平正常工作,所以正常工作的电压是0V,没有问题。
我们再来分析从没有电到上电的瞬间,电容C11上方电压是5V,下方是0V,根据我们初中所学的知识,电容C11要进行充电,正离子从上往下充电,负电子从GND往上充电,这个时候电容对电路来说相当于一根导线,全部电压都加在了R31这个电阻上,那么RST端口位置的电压就是5V,随着电容充电越来越多,即将充满的时候,电流会越来越小,那RST端口上的电压值等于电流乘以R31的阻值,也就会越来越小,一直到电容完全充满后,线路上不再有电流,这个时候RST和GND的电位就相等了也就是0V了。
从这个过程上来看,我们加上这个电路,单片机系统上电后,RST引脚会先保持一小段时间的高电平而后变成低电平,这个过程就是上电复位的过程。那这个“一小段时间”到底是多少才合适呢?每种单片机不完全一样,51单片机手册里写的是持续时间不少于2个机器周期的时间。复位电压值,每种单片机不完全一样,我们按照通常值0.7VCC作为复位电压值,复位时间的计算过程比较复杂,我这里只给大家一个结论,时间t=1.2RC,我们用的R是4700欧,C是0.0000001法,那么计算出t就是0.000564秒,即564us,远远大于2个机器周期(2us),在电路设计的时候一般留够余量就行。
按键复位(即手动复位)有2个过程,按下按键之前,RST的电压是0V,当按下按键后电路导通,同时电容也会在瞬间进行放电,RST电压值变化为4700VCC/(4700+18),会处于高电平复位状态。当松开按键后就和上电复位类似了,先是电容充电,后电流逐渐减小直到RST电压变0V的过程。我们按下按键的时间通常都会有几百毫秒,这个时间足够复位了。按下按键的瞬间,电容两端的5V电压(注意不是电源的5V和GND之间)会被直接接通,此刻会有一个瞬间的大电流冲击,会在局部范围内产生电磁干扰,为了抑制这个大电流所引起的干扰,我们这里在电容放电回路中串入一个18欧的电阻来限流。
如果有的同学已经想开始DIY设计自己的电路板,那单片机最小系统的设计现在已经有了足够的理论依据了,可以考虑尝试了。基础比较薄弱的同学先不要着急,继续跟着往下学,把课程都学完了再动手操作也不迟,磨刀不误砍柴工。
8.2 函数的调用
在一个程序的编写过程中,随着代码量的增加,如果把所有的语句都写到main函数中,一方面程序会显得的比较乱,另外一个方面,当同一个功能需要在不同地方执行时,我们就得再重复写一遍相同的语句。此时,如果把一些零碎的功能单独写成一个函数,在需要它们时只需进行一些简单的函数调用,这样既有助于程序结构的清晰条理,又可以避免大块的代码重复。
在实际工程项目中,一个程序通常都是由很多个子程序模块组成的,一个模块实现一个特定的功能,在C语言中,这个模块就用函数来表示。一个C程序一般由一个主函数和若干个其他函数构成。主函数可以调用其它函数,其它函数也可以相互调用,但其它函数不能调用主函数。在我们的51单片机程序中,还有中断服务函数,是当相应的中断到来后自动调用的,不需要也不能由其它函数来调用。
函数调用的一般形式是:
函数名 (实参列表)
函数名就是需要调用的函数的名称,实参列表就是根据实际需求调用函数要传递给被调用函数的参数列表,不需要传递参数时只保留括号就可以了,传递多个参数时参数之间要用逗号隔开。
那么我先举例看一下函数调用使程序结构更加条理清晰方面的作用。回顾一下图6-1所示的程序流程图和为实现它而编写的程序代码,相对来说这个主函数的结构就比较复杂了,很难一眼看清楚它的执行流程。那么如果我们把其中最重要的两件事——秒计数和数码管动态扫描功能都用单独的函数来实现会怎样呢?来看程序。
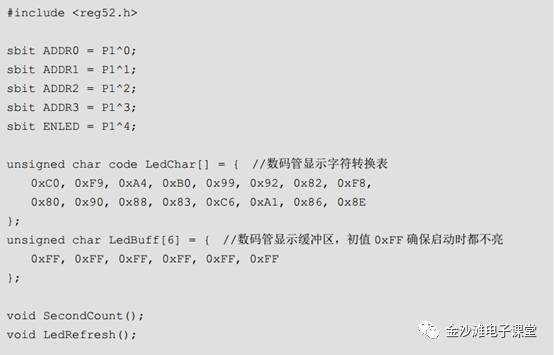
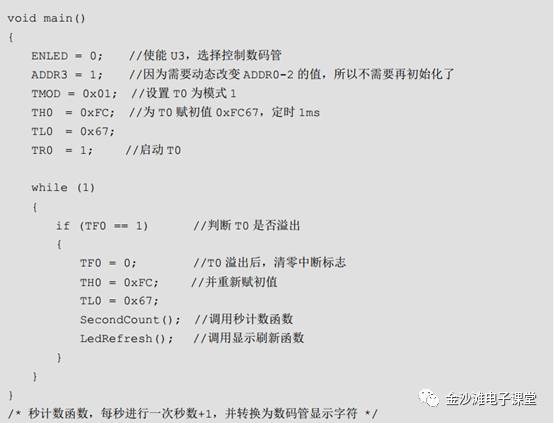
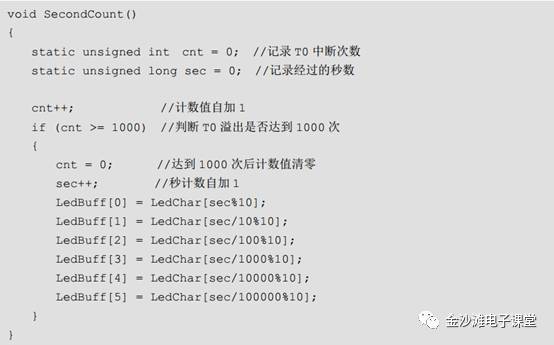
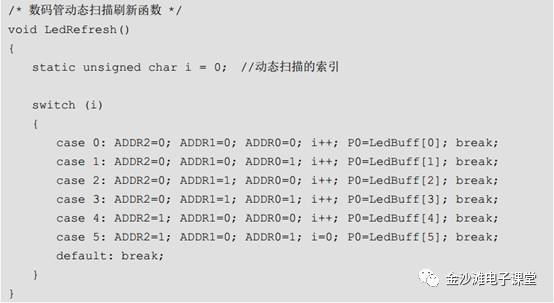
看一下,主函数的结构是不是清晰的多了——每隔1ms就去干两件事,至于这两件事是什么交由各自的函数去实现。还请大家注意一点:原来程序中的i、cnt、sec这三个变量在放到单独的函数中后,都加了static关键字而变成了静态变量。因为原来的main()永远不会结束所以它们的值也总是得到保持的,但现在它们在各自的功能函数内,如不加static修饰那么每次函数被调用时它们的值就都成了初值了,借此也把静态变量再加深一下理解吧。
当然,这是我们刻意把程序功能做了这样的划分,主要目的还是来讲解函数的调用,对于这个程序即使你不划分函数也复杂不到哪里去,但继续学下去你就能领会到划分功能函数的必要了。现在我们还是把注意力放在学习函数调用上,有以下几点需要大家注意:
1、函数调用的时候,不需要加函数类型。我们在主函数内调用SecondCount()和LedRefresh()时都没有加void。
2、调用函数与被调用函数的位置关系,C语言规定:函数在被调用之前,必须先被定义或声明。意思就是说:在一个文件中,一个函数应该先定义,然后才能被调用,也就是调用函数应位于被调用函数的下方。但是作为一种通常的编程规范,我们推荐main函数写在最前面(因为它起到提纲挈领的作用),其后再定义各个功能函数,而中断函数则写在文件的最后。那么主函数要调用定义在它之后的函数怎么办呢?我们就在文件开头,所有函数定义之前,开辟一块区域,叫做函数声明区,用来把被调用的函数声明一下,如此,该函数就可以被随意调用了。如上述例程所示。
3、函数声明的时候必须加函数类型,函数的形式参数,最后加上一个分号表示结束。函数声明行与函数定义行的唯一区别就是最后的分号,其它的都必须保持一致。这点请尤其注意,初学者很容易因粗心大意而搞错分号或是修改了定义行中的形参却忘了修改声明行中的形参,导致程序编译不过。
8.3 函数的形式参数和实际参数
上一个例程中在进行函数调用的时候,不需要任何参数传递,所以函数定义和调用时括号内都是空的,但是更多的时候我们需要在主调函数和被调用函数之间传递参数。在调用一个有参数的函数时,函数名后边括号中的参数叫做实际参数,简称实参。而被调用的函数在进行定义时,括号里的参数叫做形式参数,简称形参。我们用个简单程序例子做说明。
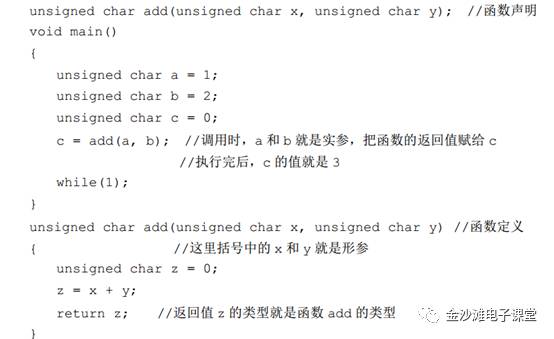
这个演示程序虽然很简单,但是函数调用的全部内容都囊括在内了。主调函数main和被调用函数add之间的数据通过形参和实参发生了传递关系,而函数运算完后把值传递给了变量c,函数只要不是void类型,就都会有返回值,返回值类型就是函数的类型。关于形参和实参,还有以下几点需要注意。
1、函数定义中指定的形参,在未发生函数调用时不占内存,只有函数调用时,函数add中的形参才被分配内存单元。在调用结束后,形参所占的内存单元也被释放,这个前边讲过了,形参是局部变量。
2、实参可以是常量,也可以是简单或者复杂的表达式,但是要求他们必须有确定的值,在调用发生时将实参的值传递给形参。如上边这个程序也可以写成:c = add(1, a+b);
3、形参必须要指定数据类型,和定义变量一样,因为它本来就是局部变量。
4、实参和形参的数据类型应该相同或者赋值兼容。和变量赋值一样,当形参和实参出现不同类型时,则按照不同类型数值的赋值规则进行转换。
5、主调函数在调用函数之前,应对被调函数做原型声明。
6、实参向形参的数据传递是单向传递,不能由形参再回传给实参。也就是说,实参值传递给形参后,调用结束,形参单元被释放,而实参单元仍保留并且维持原值。
8.4 按键
8.4.1 独立按键
常用的按键电路有两种形式,独立式按键和矩阵式按键,独立式按键比较简单,它们各自与独立的输入线相连接,如图8-6所示。
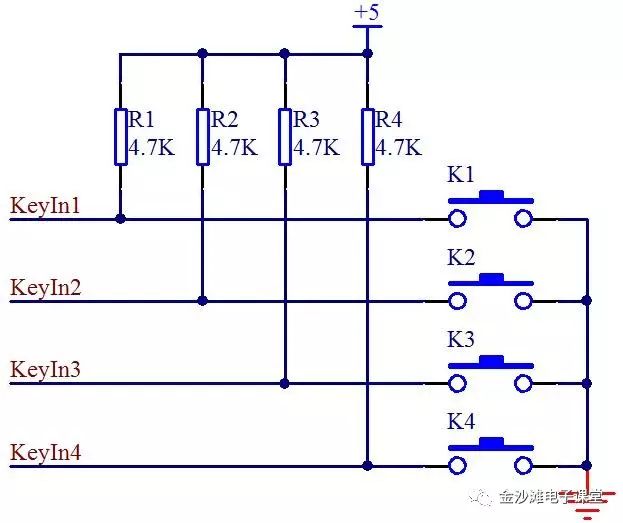
图8-6 独立式按键原理图
4条输入线接到单片机的IO口上,当按键K1按下时,+5V通过电阻R1然后再通过按键K1最终进入GND形成一条通路,那么这条线路的全部电压都加到了R1这个电阻上,KeyIn1这个引脚就是个低电平。当松开按键后,线路断开,就不会有电流通过,那么KeyIn1和+5V就应该是等电位,是一个高电平。我们就可以通过KeyIn1这个IO口的高低电平来判断是否有按键按下。
这个电路中按键的原理我们清楚了,但是实际上在我们的单片机IO口内部,也有一个上拉电阻的存在。我们的按键是接到了P2口上,P2口上电默认是准双向IO口,我们来简单了解一下这个准双向IO口的电路,如图8-7所示。
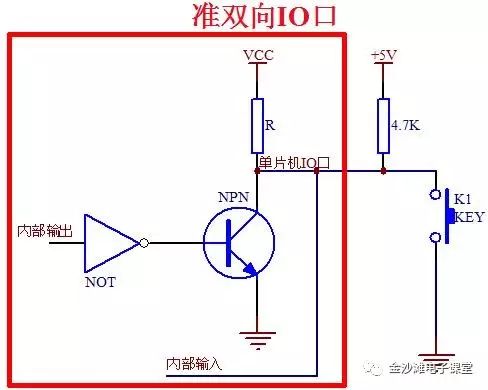
图8-7 准双向IO口结构图
首先说明一点,就是我们现在绝大多数单片机的IO口都是使用MOS管而非三极管,但用在这里的MOS管其原理和三极管是一样的,因此在这里我用三极管替代它来进行原理讲解,把前面讲过的三极管的知识搬过来,一切都是适用的,有助于理解。
图8-7方框内的电路都是指单片机内部部分,方框外的就是我们外接的上拉电阻和按键。这个地方大家要注意一下,就是当我们要读取外部按键信号的时候,单片机必须先给该引脚写“1”,也就是高电平,这样我们才能正确读取到外部按键信号,我们来分析一下缘由。
当内部输出是高电平,经过一个反向器变成低电平,NPN三极管不会导通,那么单片机IO口从内部来看,由于上拉电阻R的存在,所以是一个高电平。当外部没有按键按下将电平拉低的话,VCC也是+5V,它们之间虽然有2个电阻,但是没有压差,就不会有电流,线上所有的位置都是高电平,这个时候我们就可以正常读取到按键的状态了。
当内部输出是个低电平,经过一个反相器变成高电平,NPN三极管导通,那么单片机的内部IO口就是个低电平,这个时候,外部虽然也有上拉电阻的存在,但是两个电阻是并联关系,不管按键是否按下,单片机的IO口上输入到单片机内部的状态都是低电平,我们就无法正常读取到按键的状态了。
这个和水流其实很类似的,内部和外部,只要有一边是低电位,那么电流就会顺流而下,由于只有上拉电阻,下边没有电阻分压,直接到GND上了,所以不管另外一边是高还是低,那电平肯定就是低电平了。
从上面的分析就可以得出一个结论,这种具有上拉的准双向IO口,如果要正常读取外部信号的状态,必须首先得保证自己内部输出的是1,如果内部输出0,则无论外部信号是1还是0,这个引脚读进来的都是0。
8.4.2 矩阵按键
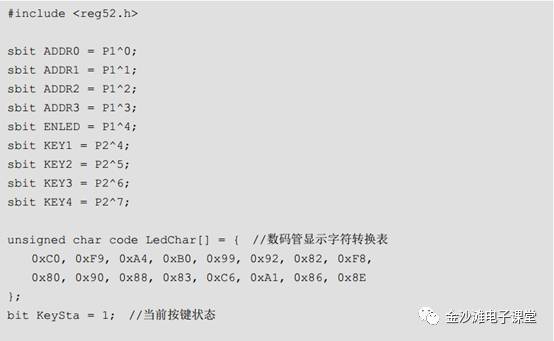
在某一个系统设计中,如果需要使用很多的按键时,做成独立按键会大量占用IO口,因此我们引入了矩阵按键的设计。如图8-8所示,是我们的KST-51开发板上的矩阵按键电路原理图,使用8个IO口来实现了16个按键。
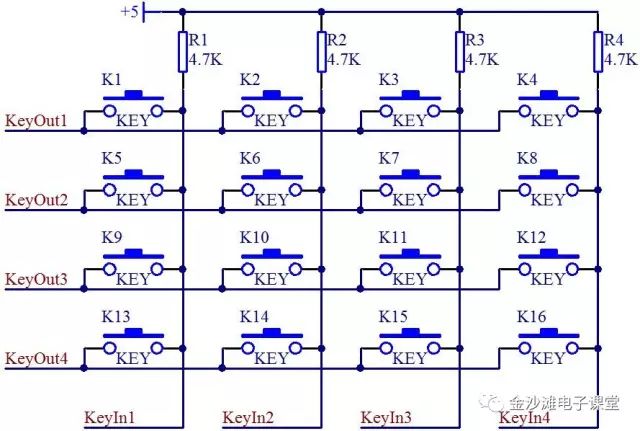
图8-8 矩阵按键原理图
如果独立按键理解了,矩阵按键也不难理解,那么我们一起来分析一下。图8-8中,一共有4组按键,我们只看其中一组,如图8-9所示。大家认真看一下,如果KeyOut1输出一个低电平,KeyOut1就相当于是GND,是否相当于4个独立按键呢。当然这时候KeyOut2、KeyOut3、KeyOut4都必须输出高电平,它们都输出高电平才能保证与它们相连的三路按键不会对这一路产生干扰,大家可以对照两张原理图分析一下。
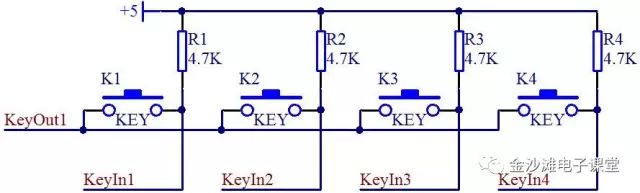
图8-9 矩阵按键变独立按键示意图
8.4.3 独立按键的扫描
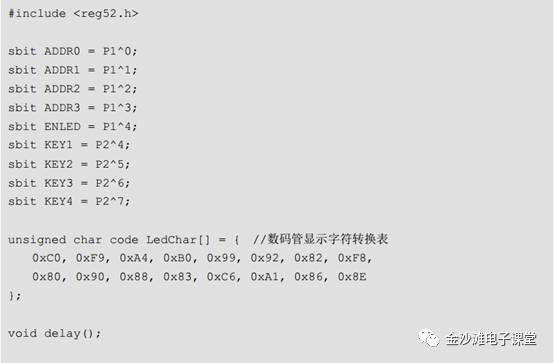
原理搞清楚了,那么下面我们就先编写一个独立按键的程序,把最基本的功能验证一下。
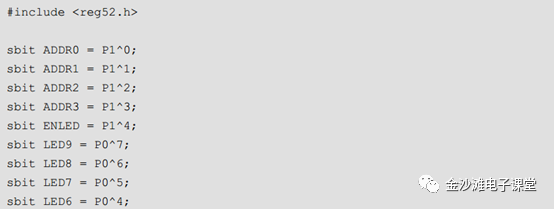
本程序固定在KeyOut1上输出低电平,而KeyOut2~4保持高电平,就相当于是把矩阵按键的第一行,即K1~K4作为4个独立按键来处理,然后把这4个按键的状态直接送给LED9~6这4个LED小灯,那么当按键按下时,对应按键的输入引脚是0,对应小灯控制信号也是0,于是灯就亮了,这说明上述关于按键检测的理论都是可实现的。
绝大多数情况下,按键是不会一直按住的,所以我们通常检测按键的动作并不是检测一个固定的电平值,而是检测电平值的变化,即按键在按下和弹起这两种状态之间的变化,只要发生了这种变化就说明现在按键产生动作了。
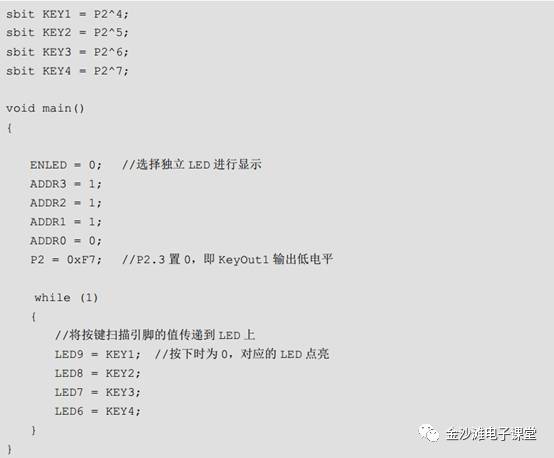
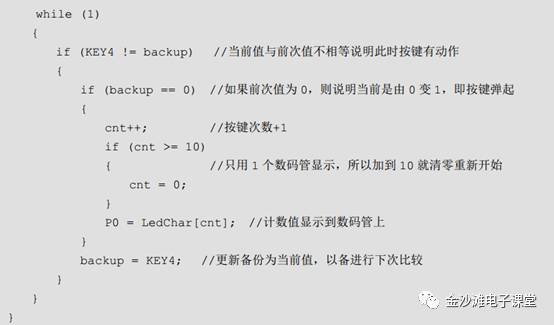
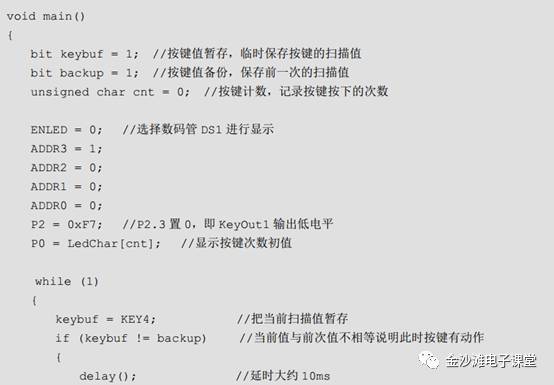
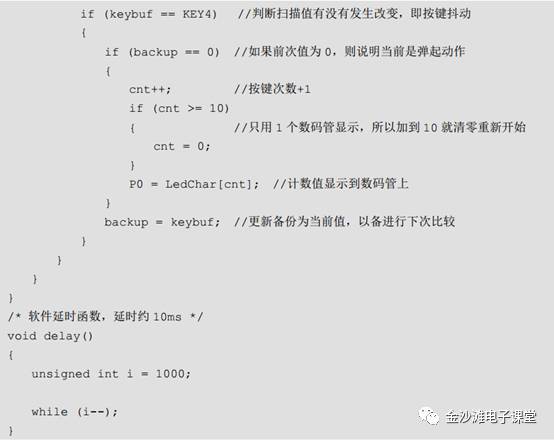
程序上,我们可以把每次扫描到的按键状态都保存起来,当一次按键状态扫描进来的时候,与前一次的状态做比较,如果发现这两次按键状态不一致,就说明按键产生动作了。当上一次的状态是未按下而现在是按下,此时按键的动作就是“按下”;当上一次的状态是按下而现在是未按下,此时按键的动作就是“弹起”。显然,每次按键动作都会包含一次“按下”和一次“弹起”,我们可以任选其一来执行程序,或者两个都用,以执行不同的程序也是可以的。下面就用程序来实现这个功能,程序只取按键K4为例。

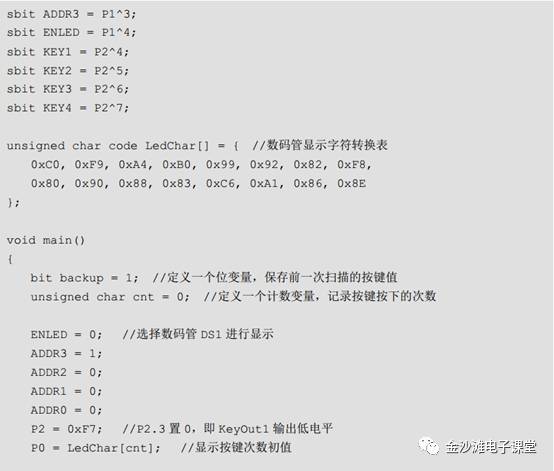
先来介绍出现在程序中的一个新知识点,就是变量类型——bit,这个在标准C语言里边是没有的。51单片机有一种特殊的变量类型就是bit型。比如unsigned char型是定义了一个无符号的8位的数据,它占用一个字节(Byte)的内存,而bit型是1位数据,只占用1个位(bit)的内存,用法和标准C中其他的基本数据类型是一致的。它的优点就是节省内存空间,8个bit型变量才相当于1个char型变量所占用的空间。虽然它只有0和1两个值,但也已经可以表示很多东西了,比如:按键的按下和弹起、LED灯的亮和灭、三极管的导通与关断等等,联想一下已经学过的内容,它是不是能用最小的内存代价来完成很多工作呢?
在这个程序中,我们以K4为例,按一次按键,就会产生“按下”和“弹起”两个动态的动作,我们选择在“弹起”时对数码管进行加1操作。理论是如此,大家可以在板子上用K4按键做做实验试试,多按几次,是不是会发生这样一种现象:有的时候我明明只按了一下按键,但数字却加了不止1,而是2或者更多?但是我们的程序并没有任何逻辑上的错误,这是怎么回事呢?于是我们就得来说说按键抖动和消抖的问题了。
8.4.4 按键消抖
通常按键所用的开关都是机械弹性开关,当机械触点断开、闭合时,由于机械触点的弹性作用,一个按键开关在闭合时不会马上就稳定的接通,在断开时也不会一下子彻底断开,而是在闭合和断开的瞬间伴随了一连串的抖动,如图8-10所示。
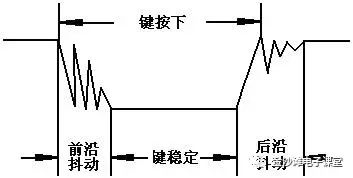
图8-10 按键抖动状态图
按键稳定闭合时间长短是由操作人员决定的,通常都会在100ms以上,刻意快速按的话能达到40-50ms左右,很难再低了。抖动时间是由按键的机械特性决定的,一般都会在10ms以内,为了确保程序对按键的一次闭合或者一次断开只响应一次,必须进行按键的消抖处理。当检测到按键状态变化时,不是立即去响应动作,而是先等待闭合或断开稳定后再进行处理。按键消抖可分为硬件消抖和软件消抖。
硬件消抖就是在按键上并联一个电容,如图8-11所示,利用电容的充放电特性来对抖动过程中产生的电压毛刺进行平滑处理,从而实现消抖。但实际应用中,这种方式的效果往往不是很好,而且还增加了成本和电路复杂度,所以实际中使用的并不多。
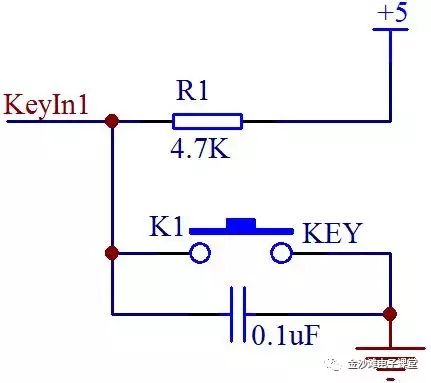
图8-11 硬件电容消抖
在绝大多数情况下,我们是用软件即程序来实现消抖的。最简单的消抖原理,就是当检测到按键状态变化后,先等待一个10ms左右的延时时间,让抖动消失后再进行一次按键状态检测,如果与刚才检测到的状态相同,就可以确认按键已经稳定的动作了。将上一个的程序稍加改动,得到新的带消抖功能的程序如下。
大家把这个程序下载到板子上再进行试验试试,按一下按键而数字加了多次的问题是不是就这样解决了?把问题解决掉的感觉是不是很爽呢?
这个程序用了一个简单的算法实现了按键的消抖。作为这种很简单的演示程序,我们可以这样来写,但是实际做项目开发的时候,程序量往往很大,各种状态值也很多,while(1)这个主循环要不停的扫描各种状态值是否有发生变化,及时的进行任务调度,如果程序中间加了这种delay延时操作后,很可能某一事件发生了,但是我们程序还在进行delay延时操作中,当这个事件发生完了,程序还在delay操作中,当我们delay完事再去检查的时候,已经晚了,已经检测不到那个事件了。为了避免这种情况的发生,我们要尽量缩短while(1)循环一次所用的时间,而需要进行长时间延时的操作,必须想其它的办法来处理。
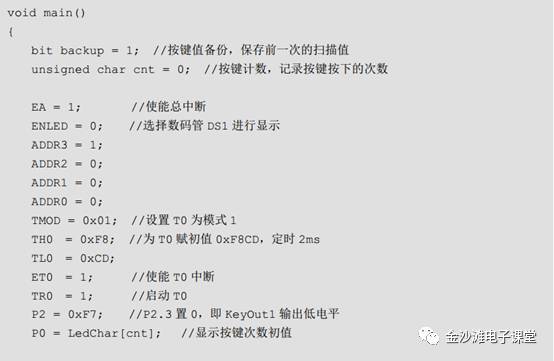
那么消抖操作所需要的延时该怎么处理呢?其实除了这种简单的延时,我们还有更优异的方法来处理按键抖动问题。举个例子:我们启用一个定时中断,每2ms进一次中断,扫描一次按键状态并且存储起来,连续扫描8次后,看看这连续8次的按键状态是否是一致的。8次按键的时间大概是16ms,这16ms内如果按键状态一直保持一致,那就可以确定现在按键处于稳定的阶段,而非处于抖动的阶段,如图8-12。

图8-12 按键连续扫描判断
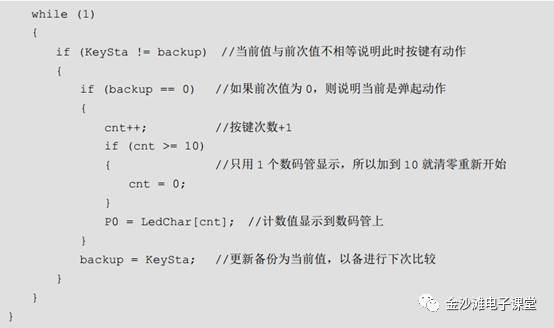
假如左边时间是起始0时刻,每经过2ms左移一次,每移动一次,判断当前连续的8次按键状态是不是全1或者全0,如果是全1则判定为弹起,如果是全0则判定为按下,如果0和1交错,就认为是抖动,不做任何判定。想一下,这样是不是比简单的延时更加可靠?
利用这种方法,就可以避免通过延时消抖占用单片机执行时间,而是转化成了一种按键状态判定而非按键过程判定,我们只对当前按键的连续16ms的8次状态进行判断,而不再关心它在这16ms内都做了什么事情,那么下面就按照这种思路用程序实现出来,同样只以K4为例。
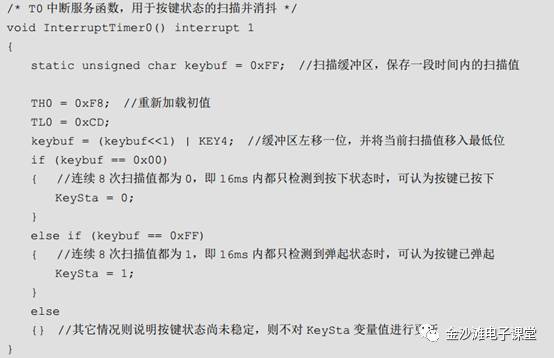
这个算法是我们在实际工程中经常使用按键所总结的一个比较好的方法,介绍给大家,今后都可以用这种方法消抖了。
-
单片机
+关注
关注
6056文章
44805浏览量
643956 -
振荡器
+关注
关注
28文章
3941浏览量
140131 -
C语言
+关注
关注
180文章
7624浏览量
139496 -
STC89C52RC
+关注
关注
15文章
64浏览量
38867 -
GND
+关注
关注
2文章
541浏览量
39254
发布评论请先 登录
相关推荐

解锁TSMaster fifo函数:报文读取的高效方法

STM32C031C6在按键中断处理程序中使用HAL_Delay()延时函数,程序则无法运行怎么解决?

【RA-Eco-RA4E2-64PIN-V1.0开发板试用】使用按键SW1实现单击,双击,长按等多种按键功能
如何优化SUMIF函数的效率
SUMIF函数与SUMIFS函数的区别

面试常考+1:函数指针与指针函数、数组指针与指针数组






 工商网监
工商网监
评论