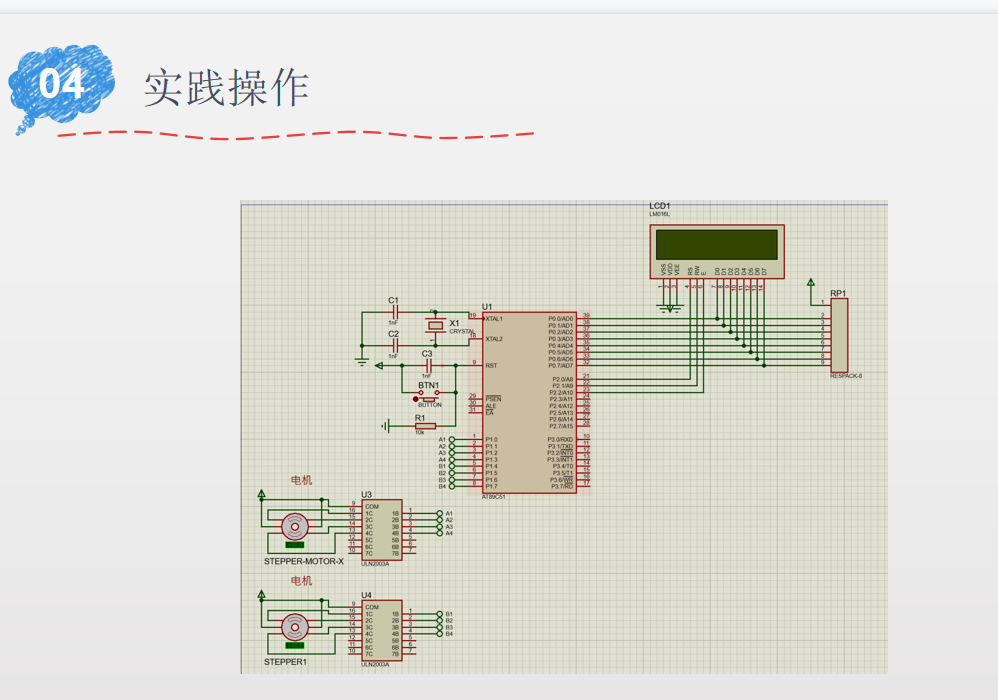
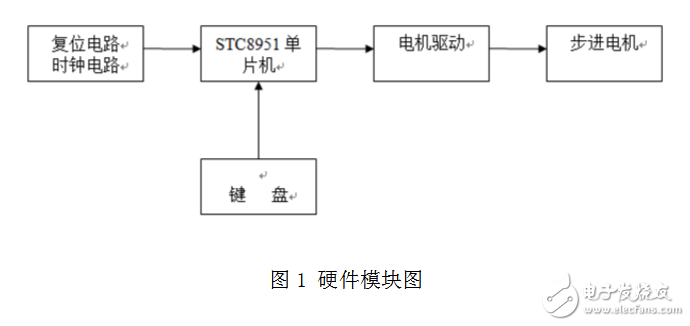
 Proteus教程:步进电机
Proteus教程:步进电机
视频教程:https://www.bilibili.com/video/BV1fF411K79x
#include< reg51.h >
#include < math.h >
#define uchar unsigned char
#define uint unsigned int
#define LCD1602_DATAPINS P0
sbit LCD1602_E=P2^2;
sbit LCD1602_RW=P2^1;
sbit LCD1602_RS=P2^0;
sbit MA_1 = P1^0;
sbit MA_2 = P1^1;
sbit MA_3 = P1^2;
sbit MA_4 = P1^3;
sbit MB_1 = P1^4;
sbit MB_2 = P1^5;
sbit MB_3 = P1^6;
sbit MB_4 = P1^7;
uchar flag;
unsigned char code M_A[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9}; //X反转顺序
unsigned char code M_B[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1}; //X正转顺序
/*******************************************************************************
* 函 数 名 : Delay
* 函数功能 : 延时
*******************************************************************************/
void DDelay(unsigned int t)
{
unsigned int k;
while(t--)
{
for(k=0; k< 80; k++);
}
}
/*******************************************************************************
* 函 数 名 : Lcd1602_Delay1ms
* 函数功能 : 延时函数,延时1ms
* 输 入 : c
* 输 出 : 无
* 说 名 : 该函数是在12MHZ晶振下,12分频单片机的延时。
*******************************************************************************/
void Lcd1602_Delay1ms(uint c) //误差 0us
{
uchar a,b;
for (; c >0; c--)
{
for (b=199;b>0;b--)
{
for(a=1;a>0;a--);
}
}
}
/*******************************************************************************
* 函 数 名 : LcdWriteCom
* 函数功能 : 向LCD写入一个字节的命令
* 输 入 : com
* 输 出 : 无
*******************************************************************************/
void LcdWriteCom(uchar com) //写入命令
{
LCD1602_E = 0; //使能
LCD1602_RS = 0; //选择发送命令
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = com; //放入命令
Lcd1602_Delay1ms(1); //等待数据稳定
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E = 0;
}
/*******************************************************************************
* 函 数 名 : LcdWriteData
* 函数功能 : 向LCD写入一个字节的数据
* 输 入 : dat
* 输 出 : 无
*******************************************************************************/
void LcdWriteData(uchar dat) //写入数据
{
LCD1602_E = 0; //使能清零
LCD1602_RS = 1; //选择输入数据
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = dat; //写入数据
Lcd1602_Delay1ms(1);
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E = 0;
}
/*******************************************************************************
* 函 数 名 : LcdInit()
* 函数功能 : 初始化LCD屏
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void LcdInit() //LCD初始化子程序
{
LcdWriteCom(0x38); //开显示
LcdWriteCom(0x0c); //开显示不显示光标
LcdWriteCom(0x06); //写一个指针加1
LcdWriteCom(0x01); //清屏
LcdWriteCom(0x80); //设置数据指针起点
}
//按指定位置显示一个字符
void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData)
{
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
if (Y) X |= 0x40; //当要显示第二行时地址码+0x40;
X |= 0x80; // 算出指令码
LcdWriteCom(X); //这里不检测忙信号,发送地址码
LcdWriteData(DData);
}
//按指定位置显示一串字符
void DisplayListChar(unsigned char X, unsigned char Y, unsigned char code *DData)
{
unsigned char ListLength;
ListLength = 0;
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
while (DData[ListLength]>=0x20) //若到达字串尾则退出
{
if (X <= 0xF) //X坐标应小于0xF
{
DisplayOneChar(X, Y, DData[ListLength]); //显示单个字符
ListLength++;
X++;
}
}
}
//unsigned char code M_A[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9}; //X反转顺序
//unsigned char code M_B[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1}; //X正转顺序
void Motor_A1()
{
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 0;
MA_4 = 1;
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 1;
MA_4 = 1;
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 1;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 1;
MA_3 = 1;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 1;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 1;
MA_2 = 1;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 1;
MA_2 = 0;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 1;
MA_2 = 0;
MA_3 = 0;
MA_4 = 1;
}
//unsigned char code M_B[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1}; //X正转顺序
void Motor_A2()
{
DDelay(3);
MA_1 = 1;
MA_2 = 0;
MA_3 = 0;
MA_4 = 1;
DDelay(3);
MA_1 = 1;
MA_2 = 0;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 1;
MA_2 = 1;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 1;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 1;
MA_3 = 1;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 1;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 1;
MA_4 = 1;
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 0;
MA_4 = 1;
}
void Motor_B1()
{
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 0;
MB_4 = 1;
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 1;
MB_4 = 1;
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 1;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 1;
MB_3 = 1;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 1;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 1;
MB_2 = 1;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 1;
MB_2 = 0;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 1;
MB_2 = 0;
MB_3 = 0;
MB_4 = 1;
}
void Motor_B2()
{
DDelay(3);
MB_1 = 1;
MB_2 = 0;
MB_3 = 0;
MB_4 = 1;
DDelay(3);
MB_1 = 1;
MB_2 = 0;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 1;
MB_2 = 1;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 1;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 1;
MB_3 = 1;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 1;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 1;
MB_4 = 1;
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 0;
MB_4 = 1;
}
void M_Con(uchar id,uchar dir,uint step)
{
uchar i;
if(id == 0)
{
if(dir == 0)
{
for(i=0;i< step;i++)
{
Motor_A1();
}
}else if(dir == 1)
{
for(i=0;i< step;i++)
{
Motor_A2();
}
}
}
if(id == 1)
{
if(dir == 0)
{
for(i=0;i< step;i++)
{
Motor_B1();
}
}else if(dir == 1)
{
for(i=0;i< step;i++)
{
Motor_B2();
}
}
}
}
/*******************************************************
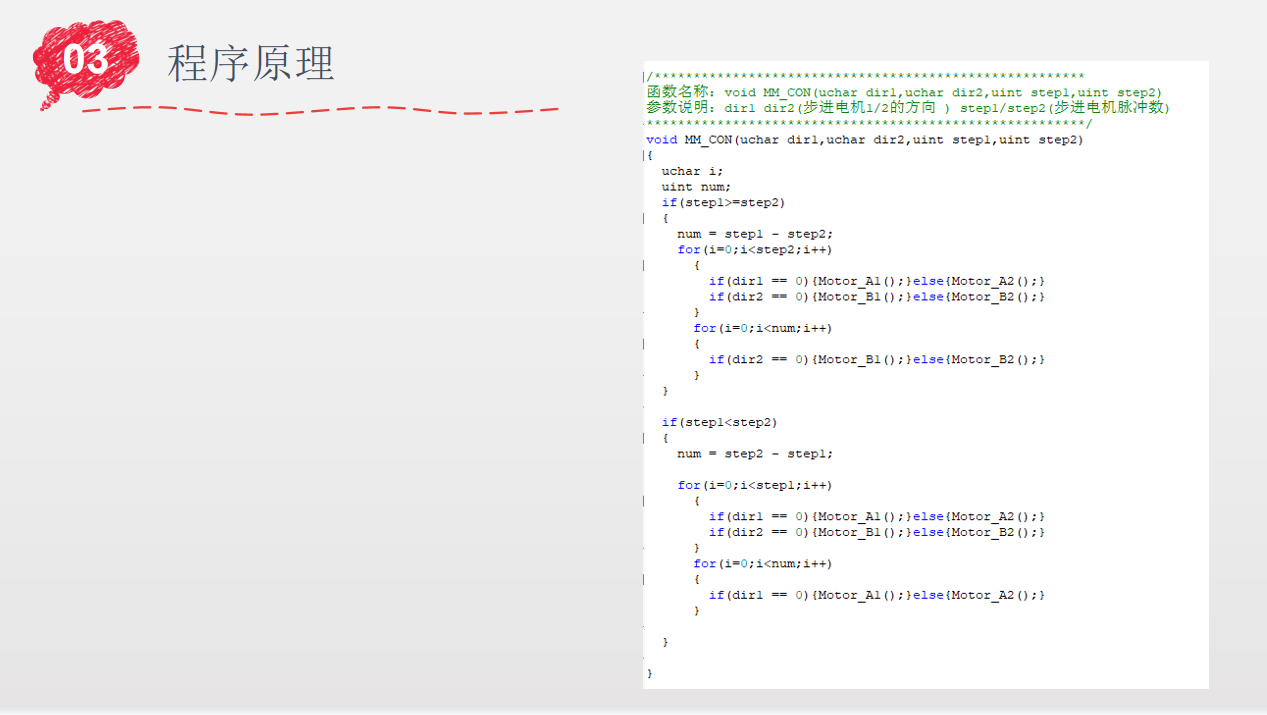
函数名称:void MM_CON(uchar dir1,uchar dir2,uint step1,uint step2)
参数说明:dir1 dir2(步进电机1/2的方向 ) step1/step2(步进电机脉冲数)
********************************************************/
void MM_CON(uchar dir1,uchar dir2,uint step1,uint step2)
{
uchar i;
uint num;
if(step1 >=step2)
{
num = step1 - step2;
for(i=0;i< step2;i++)
{
if(dir1 == 0){Motor_A1();}else{Motor_A2();}
if(dir2 == 0){Motor_B1();}else{Motor_B2();}
}
for(i=0;i< num;i++)
{
if(dir2 == 0){Motor_B1();}else{Motor_B2();}
}
}
if(step1< step2)
{
num = step2 - step1;
for(i=0;i< step1;i++)
{
if(dir1 == 0){Motor_A1();}else{Motor_A2();}
if(dir2 == 0){Motor_B1();}else{Motor_B2();}
}
for(i=0;i< num;i++)
{
if(dir1 == 0){Motor_A1();}else{Motor_A2();}
}
}
}
double sin_ans;
double arc_sin;
uint get_H;
uint get_L;
uchar show;
void main()
{
LcdInit();
DisplayListChar(2,0,"Step Motor");
MM_CON(1,0,(uint)(15/2*5),(uint)(18/2*5));
while(1)
{
}
}
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Proteus
+关注
关注
79文章
1692浏览量
107519 -
电动机
+关注
关注
75文章
4139浏览量
97669 -
步进电机
+关注
关注
152文章
3136浏览量
148444
发布评论请先 登录
相关推荐
基于单片机和proteus的步进电机控制
发表于 03-02 22:10
•132次下载
基于proteus的步进电机仿真简介
发表于 12-02 10:50
•15次下载
Proteus步进电机控制资料
发表于 06-19 14:33
•9次下载
proteus步进电机仿真
步进电机是一种能够将电脉冲信号转换成角位移或线位移的机电元件,它实际上是一种单相或多相同步电动机。单相步进电动机有单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动。多相步进电动机
发表于 02-26 09:56
•5.4w次阅读






 工商网监
工商网监
评论