 在约束条件下优化非线性目标函数的问题
在约束条件下优化非线性目标函数的问题
非线性规划是一类在约束条件下优化非线性目标函数的问题。以下是几个常见的非线性规划算法:
1. 罚函数法
罚函数法通过惩罚不满足约束条件的点,将非线性规划问题转化为一个无约束优化问题。具体来说,定义一个罚函数  ,它在可行域内取值为0,否则为一个较大的正数。这样,原问题可以转化为一个带有惩罚项的无约束优化问题,即:
,它在可行域内取值为0,否则为一个较大的正数。这样,原问题可以转化为一个带有惩罚项的无约束优化问题,即:
其中, 是一个较大的正数。
2. 信赖域法
信赖域法通过在每次迭代中构建一个局部模型来近似原始问题,然后在局部模型上进行优化。优化完成后,比较原始问题和局部模型的表现,决定是否接受求解结果或者继续迭代。该方法的核心是信赖域半径的精确定义和控制。
3. 内点法
内点法通过引入一个内点路径,使得每个迭代点都在可行域内。具体来说,引入一个惩罚因子 ,并将目标函数  中的约束条件
中的约束条件  替换为一个惩罚项
替换为一个惩罚项  。这样,原问题可以转化为一个无约束的优化问题:
。这样,原问题可以转化为一个无约束的优化问题:

然后,通过一系列迭代,将 缩小至零,从而逐步逼近原始问题。
以上是几个常见的非线性规划算法示例。除此之外,还有很多其他的算法,例如拟牛顿法、次梯度法、粒子群算法等等。
使用罚函数法求解非线性规划的简单示例
在 MATLAB 中,可以使用 fmincon 函数来求解非线性规划问题,其中包括罚函数法。fmincon 函数的使用方法非常灵活,可以通过修改参数来指定不同的算法、约束条件等。
以下是一个使用罚函数法求解非线性规划的简单示例:
假设有以下优化问题:

满足以下约束条件:
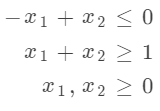
对于罚函数法,我们可以将上面的约束条件转化为惩罚项,即:
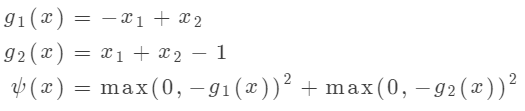
然后将目标函数和罚函数相加,得到无约束优化问题:

其中 是一个较大的正数。
下面是 MATLAB 的代码实现:
%定义目标函数和约束条件 f=@(x)(x(1)-1)^2+x(2)^2; g=@(x)[x(2)-x(1);x(1)+x(2)-1]; %定义罚函数 rho=10; penalty=@(x)max(0,-g(x))^2; %定义总目标函数 F=@(x)f(x)+rho*penalty(x); %定义初始点和约束条件 x0=[0;0]; A=[-11;11]; b=[0;1]; %调用fmincon函数进行优化 options=optimoptions('fmincon','Display','iter'); [x,fval,eflag,output]=fmincon(F,x0,A,b,[],[],[],[],[],options);
在上面的代码中,首先定义了目标函数 f 和约束条件 g,然后通过罚函数法将其转化为无约束优化问题。最后,调用 fmincon 函数来求解优化问题。
需要注意的是,使用罚函数法求解非线性规划问题时,要根据实际情况选择合适的惩罚系数 。过小的 可能导致解不准确,过大的 可能导致数值不稳定。
审核编辑:汤梓红
-
算法
+关注
关注
23文章
4646浏览量
93712 -
函数
+关注
关注
3文章
4353浏览量
63292 -
约束
+关注
关注
0文章
82浏览量
12813
原文标题:在约束条件下优化非线性目标函数的问题
文章出处:【微信号:嵌入式职场,微信公众号:嵌入式职场】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基本rs触发器的约束条件
matlab中无约束非线性规划函数\fminunc函数使用方法
如何求解约束条件下的线性超定方程组的最优解
基于非线性约束的局部投影降噪
一种多约束条件下路径规划算法研究

基于无约束优化的无参数填充函数算法
开关电源线性化条件研究
两种SR锁存器的约束条件
浅谈多目标优化约束条件下充电设施有序充电控制策略





 工商网监
工商网监
评论