 从ADAS到驱动器更换——实际雷达性能是否足够好?
从ADAS到驱动器更换——实际雷达性能是否足够好?
1904年,雷达首次被Christian Huelsmeyer用于探测船只,已有一个多世纪的历史。常见的应用是军事雷达、民用航空交通管制,当然,还有针对私家车辆的测速点。但是现在存在一种误解,认为这项技术已经成熟,该领域几乎没有什么发展。成像雷达和协同雷达都在进行着颠覆性的新创新。ADI公司(ADI)如何在汽车领域应用中实现雷达并引入独特的软件和算法正是其特殊之处。
过去25年里,ADI一直活跃在汽车行业,其产品既可用于被动安全应用,也可用于主动安全应用。过去15年里,ADI以DSP和数据转换器在汽车雷达供应链中占有一席之地,最近还提供24 GHz和77 GHz/79 GHz雷达芯片组。
ADI自动交通和安全副总裁Chris Jacobs表示:“高级驾驶员辅助系统已面市,自动驾驶即将到来,而道路安全至关重要。所以,我和工程师致力于使用先进的功能和技术来实现更高的性能和自主性,从而挽救生命。据我们估计,基于我们产品的汽车传感器每天可以挽救8条生命。”
为了保护驾驶员、乘客和行人,硬件和软件都需要大量创新。必须开发一种更高效且优化的雷达技术,提供与航空航天和防务行业系统相同的高性能、功能和可靠性,并转化为适合私家汽车市场的尺寸和成本。
ADI自动交通和汽车安全事业部技术总监Mike Keaveney说道:“虽然25万美元的高分辨率成像雷达系统成本对于价值数百万美元的军用坦克总价来说不算什么,但与均价3万美元的家用汽车相比便贵的离谱了。我们正在探索如何进行定制,微型化、加固,降低成本、尺寸、重量和电源需求,以便能够用于每辆汽车。”
雷达的挑战
转让和采用军事和航空航天的高成本、高性能雷达技术,并将其安装在汽车上,在技术、美学和经济方面都面临重大挑战。关键的挑战不仅在于减少尺寸、重量和功率(SWaP),还要在降低成本的同时提高性能。雷达不仅必须能够进行物体检测,还必须能够进行物体分类。这就要求雷达图像的分辨率比目前先进系统的分辨率更高。
这些都是ADI致力于实现的目标,以推进技术发展,确保安全,并将经济高效的汽车雷达带给消费者。
性能
在不增加尺寸、成本和功耗预算的情况下,将角度分辨率提高到高度自动驾驶所需的水平。
增加低反射率目标发出的反射点数量。
大幅减少检测延迟,特别是对于横向移动的物体,这可缩短响应时间,并允许车辆在紧急情况下采取规避行动。
SWaP
优化外形尺寸(大小、重量和功率),同时保持高性能。
在不影响车辆工业设计的前提下,保持系统的美观。
成本/经济学
以大众市场汽车成本约束可接受的价格和外形尺寸实现高分辨率雷达。
将成本控制在购车者的价格敏感范围内,因为他们才是为这一切买单的人。
法规
还必须继续遵守政府规定的高级驾驶员辅助系统(ADAS)安全特性(如2022年美国自动紧急制动指令)。雷达将不再是一个选项,而是标准。因此,关键是要不断地将系统成本降低到一个消费者和OEM都可以接受的价格点,同时仍然保持这些具有挑战性的ADAS应用所需的性能。如今的汽车雷达装置比手机还小,能探测您前方、后方或侧方的盲点位置是否存在大型障碍。但这还不够。
成像雷达
成像雷达的概念和实现更高水平的角度分辨率是一项理想功能,对于自动驾驶出租车来说尤其如此。高分辨率不仅支持物体检测(前面有东西),还支持物体分类(前面有自行车、汽车、人或小孩)。
为实现更高的分辨率,成像雷达利用高带宽信号处理、数字波束合成和相控阵技术。这些都依赖于大量的硬件和处理能力,其中天线尺寸随着所需的角度分辨率而缩放,通道计数增加以使用通道覆盖所需的天线区域。"只是投入更多昂贵的硬件来解决这一问题,是将更高分辨率作为解决方案的一种'暴力'方式,"Chris Jacobs表示。
如今,ADI正与领先的OEM和一级供应商紧密合作,开发新的突破性方法,来改进雷达并应对其现代挑战。如今的汽车采用的雷达分辨率都不高,只能看到一团东西。它可以检测到汽车周围存在物体,可能是摩托车,可能是人或大型卡车,但无法确认该物体是什么。在硬件检测技术和软件算法进步的推动下,雷达的分辨率提高,能够分辨检测物体的属性,这让我们距离安全的全自动驾驶汽车又更近了一步。
分辨率问题和关于物体区分的挑战
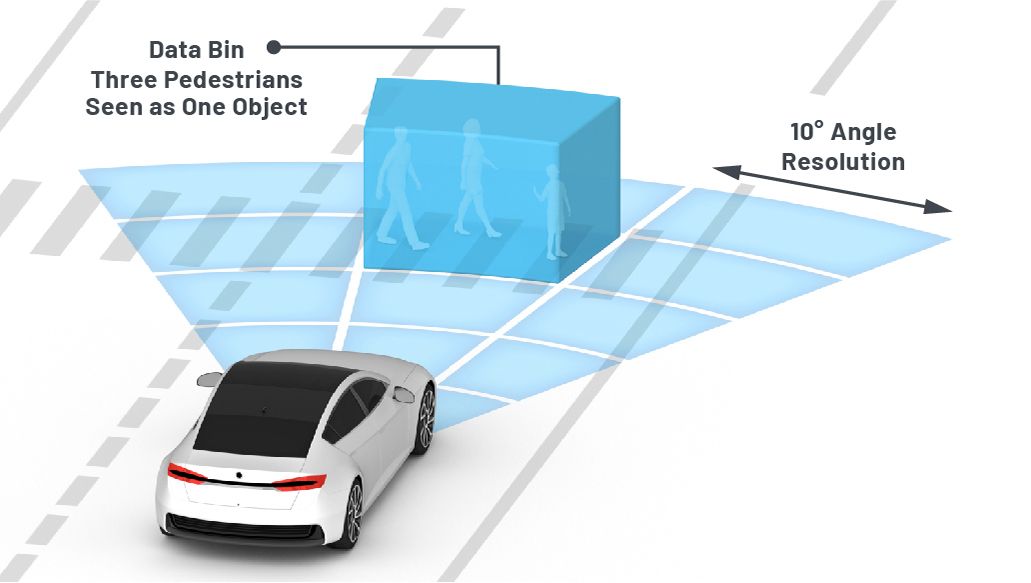
现有的常规汽车雷达在大视场范围内提供大约10°到20°的水平角度分辨率。
成像雷达的角度分辨率为1°至2°,是非成像雷达分辨率的10倍。数据箱收集1°到2°分辨率的信息,帮助区分和确定3名行人的位置。
数据处理
您为更高分辨率所花费的成本将给您带来更多数据,随着分辨率增加,数据量也相应增加,这就需要更多的计算能力。这就是为什么高效处理所有数据的先进模式对于管理大量数据和低功耗至关重要。高效的中央处理或者边缘处理,将是未来雷达的基础。
下一步:协同雷达与通信需求
Mike Keaveney说道:"利用现有车载雷达传感器硬件的协同雷达是未来汽车领域的发展方向。协同雷达就是相干性和识别协同创建高分辨率相干图像的事物需求,在本例中是指检测雷达。一旦实现了协同雷达的经济性,就能够享受诸多优势。"
协同雷达可提供成像雷达性能,而不会显著增加车内个别现有雷达系统的大小。这是因为有效孔径现在由两个(或多个)具有重叠视场的分布式雷达传感器之间的距离设定,而不是由任何一个传感器的物理尺寸预先确定。
初级雷达现在常用于汽车。来自每个发射源的雷达信号反射到一个物体上,然后传回到原点。孔径,或者说初级雷达的性能,是以英寸为单位的雷达发射器本身的宽度。
协同雷达/SuperRADAR较大的孔径
SuperRADAR是ADI通过多个具有重叠视场的雷达波束实现相干性算法的方法。
基于SuperRADAR的协同雷达使用低速链路在雷达源之间进行粗略定时。每个传感器向中央处理器发送数据,或者可能从一个雷达向另一个雷达发送数据,并在边缘传感器上进行处理,后面这种方法更经济。
Chris Jacobs表示:"传统协同雷达系统不容易实现,因为需要在雷达之间运行高频链路。实现这种相干性的硬件开销和成本非常高。"
对于汽车雷达来说,提高协同雷达的性价比非常有必要。Jacobs说:"向汽车添加硬件的传统方法并非解决方案,我们必须换个思路来看问题。我们可以通过智能方式,用算法将这些技术结合起来,使用系统中的相同硬件提高组合系统性能。ADI的SuperRADAR方法允许雷达系统产生多个非相干图像的相干叠加。"
协同雷达
协同雷达的工作原理是什么?来自每个源的信号反射到一个物体上,被两个雷达接收器捕获。因此,同一目标有2个外观(或两个不同的视图),并且目标上的时间为2倍,而初级雷达只有一个外观,时间也只有1倍。此外,由于两个雷达协同工作,雷达孔径(与性能成正比)是汽车前部的尺寸,两个角雷达之间的距离(大约4英尺),与初级雷达的英寸完全不同。
这种方法允许实现经济高效的传感器设计,可将传感器放在车辆周围的多个点上,支持出色的物体检测和分类。
SuperRADAR的优势:1 + 1 > 2
SuperRADAR不仅降低尺寸、重量和功耗,还为系统带来更多功能,从而提高分辨率,同时显著减少硬件,在更合理的成本范围内提高应用性能。
更多反射点:目标上的时间为2倍
SuperRADAR可使用同样多的硬件提供两倍性能。或者,使用一半的雷达通道来保持相同的性能。Chris Jacobs说:"借助SuperRADAR,我们得到的分辨率是单个雷达的两倍。可能会需要额外的处理能力,但是汽车级DSP/MCU的路线图足以满足这些处理需求。"
SuperRADAR实际上就是雷达融合。我们将融合两个独立的雷达视图,因此得到的分辨率比单独完成的更好。Jacobs表示:"融合将成为未来实施ADAS的标准方式。"
降低延迟:快速计算横向速度可挽救生命
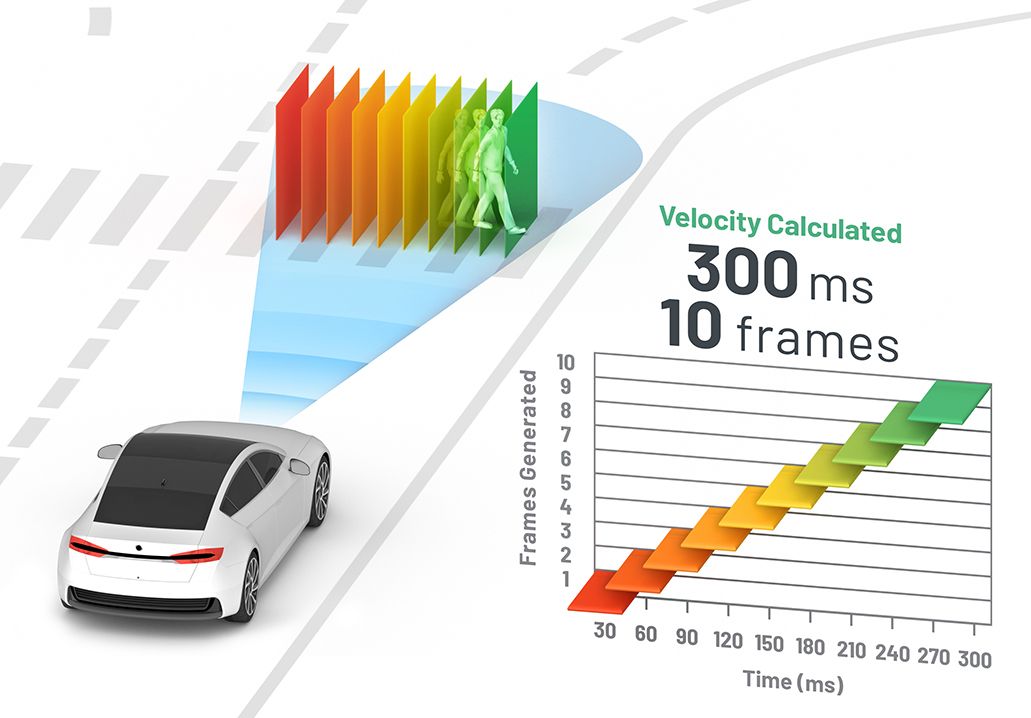
车辆成像系统的一个重点是能够快速计算横向速度,即物体正交(以直角)移动到车辆行驶方向的速度。但是,要实现足够低的误报率,即使是主要基于摄像头的出色机器学习算法仍然需要大约300 ms来进行横向移动检测。对于在以每小时60英里速度行驶的车辆前方行走的行人来说,毫秒之差就关系到人员受伤的轻重程度,因此响应时间至关重要。
300 ms延迟是由系统从10个连续视频帧执行增量矢量计算所需的时间造成的,10个是以可接受的低误报率进行可靠检测所需的数目。但是,由于SuperRADAR的宽有效孔径,以及它将来自两个或多个传感器的图像连贯组合的方式,它能够在一个30 ms的测量周期内精确地计算出速度的切向分量和径向分量(这种延迟比目前一流的系统快10倍)。这种低延迟的检测比F1赛车手的反应时间100 ms要少,远远少于一般驾驶员的反应时间!
使用当今常见的成像雷达技术,如果有人过马路,就需要多个摄像头图像来显示正在移动的物体。每个摄像头图像需要30 ms。10个图像需要300 ms。在这段时间内,汽车移动几英尺。
两个雷达协同工作,可以进行三角测量,从而捕捉运动中的物体,因为两个雷达源都是偏置的。只需要先用雷达波束1从位置1映射这个人,然后在30 ms后用雷达波束2从位置2映射。这就让汽车知道人的移动方向。
SuperRADAR只需使用传统成像雷达十分之一的时间即可识别穿越道路的移动物体。
SuperRADAR的经济性
SuperRADAR概念不仅是降低整体系统成本的有效方法,而且能够满足性能需求,为最终应用带来更大的价值。
Chris Jacobs表示,"我们要的是成像雷达的性能,现在只能在昂贵的自动驾驶出租车应用中找到,还要去除所有昂贵的硬件,把价格降到个人车主能够承受的水平。这正是SuperRADAR发挥作用的地方,用最少的硬件占用空间和硬件上面运行的软件,产生两倍的性能。"
汽车的未来
在我们展望汽车领域的未来时,我们发现可能需要从根本上重新构建现有系统。现有的汽车平台与未来的汽车平台极为不同。
凭借在垂直领域的丰富经验和专业知识,ADI具备独特的优势,能够通过硬件和软件产品的组合来优化未来汽车的雷达处理需求,为最终应用带来更多价值。这种算法直接解决了汽车制造商目前和未来面临的总拥有成本(TOCO)挑战。
SuperRADAR潜力十足,而目前还处于初步探索阶段。这项技术不仅是一种推动ADAS的更高性能、更经济高效的解决方案,而且最终会挽救生命。
审核编辑:郭婷
-
汽车电子
+关注
关注
3031文章
8085浏览量
168387 -
SWAP
+关注
关注
0文章
51浏览量
12998 -
adas
+关注
关注
310文章
2208浏览量
209123
发布评论请先 登录
相关推荐
从ADAS到驱动器更换——实际雷达性能是否足够好?
智能网联汽车ADAS雷达汽车报警数据发生器
汽车毫米波雷达传感器的性能一致性
77G毫米波雷达在 ADAS 功能和 AD 自动驾驶中的角色和功能
车载雷达和ADAS视觉方案,详尽系统硬件设计与仿真
ADAS系统无人驾驶的眼睛毫米波雷达
电机驱动器解决方案以及从分立元件构建驱动器
从ADAS到驾驶员更换—实际雷达性能是否足够好
从ADAS到驾驶员更换—实际雷达性能是否足够好
电机驱动器在实际使用时的输出电流

MCU是否会从ADAS域控制器消失





 工商网监
工商网监
评论