 使用Processing与Arduino进行交互将MPU6050数据进行3D建模展示
使用Processing与Arduino进行交互将MPU6050数据进行3D建模展示
对MPU6050姿态解算得到欧拉角后,就可以应用于四轴等对姿态进行控制了。为了更直观的理解三个欧拉角,本篇我们使用Processing软件与Arduino进行交互,将MPU6050数据进行3D建模展示。
1
Processing介绍
Processing是一种文本编程语言,主要用于处理可视化数据,并可以将数据呈现为2D或3D模型 。它以Java语言为基础,并且做了扩展和延伸,将计算机编程和艺术创作完美结合,将代码转换成千变万化的图像。
对于电子爱好者来说,我们以单片机、Arduino等MCU为主的嵌入式应用很难将数据进行直观的展示,通过C#、QT等来开发PC机上的可视化软件又比较复杂,而通过Processing这一开源平台可简单方便的实现互动。
在这里我们不对Processing进行展开讲解,如读者对其感兴趣可关注后续系列教程笔记。
2
Prosessing软件及其库安装
我们可以登录Processing官网进行软件下载,本文写作时,最新版本为3.5.4。
本文使用Windows-64bit版本,另外还需要安装"toxiclibs"库。为方便大家使用,已经将资源进行了整理,可在文末获取。
将下载的Processing压缩包进行解压,双击可执行文件即可运行软件。

安装Processing
在软件运行后,会在"C:\\Users\\Tony\\Documents"目录下生成Processing文件夹,其中"Tony"为电脑用户名。将下载的库文件"toxiclibs-complete-0020.zip"进行解压,将解压文件拷贝到该目录下的libraries文件夹,即可完成库安装。

安装库文件
3
实验材料
4
实验步骤
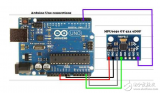
1.根据原理图搭建电路图。
MPU6050传感器模块的VCC、GND分别连接开发板的3.3V、GND,传感器的SDA、SCL引脚连接开发板A4、A5引脚。
实验原理图如下图所示:

实验原理图
2.启动Arduino IDE,点击「文件」—「示例」,在示例中找到上一篇安装的MPU6050驱动库示例「MPU6050_DMP6」。

打开示例文件
3.对代码进行简单修改,将代码103行屏蔽掉,打开120行宏定义。选择开发板及端口号,上传程序。

修改代码

程序下载
4.启动Processing,点击「文件」—「打开」,打开MPU6050驱动库MPUTeapot文件夹下MPUTeapot.pde,文件路径为"C:\\Users\\Tony\\Documents\\Arduino\\libraries\\MPU6050\\examples\\MPU6050_DMP6\\Processing\\MPUTeapot",其中"Tony"为电脑用户名。

打开Processing程序
5.屏蔽代码71行,然后在74行修改添加当前Arduino开发板端口号,例如我的是COM18,然后点击运行。

运行Processing
5. 实验现象
运行Processing后,会出现小飞机模型,晃动MPU6050,小飞机会在3D坐标中运动。

实验现象
-
MPU
+关注
关注
0文章
361浏览量
48849 -
Arduino
+关注
关注
188文章
6471浏览量
187304 -
GND
+关注
关注
2文章
539浏览量
38777 -
MPU6050
+关注
关注
39文章
307浏览量
71483 -
MCU芯片
+关注
关注
3文章
253浏览量
11542
发布评论请先 登录
相关推荐
Arduino与MPU6050的通信
一文看懂mpu9150和mpu6050区别
MPU6050常见问题的分析与处理

使用MPU6050、ESP8266和Qubitro进行ART分析
使用arduino、mpu6050和python控制游戏
Arduino MPU6050 32x8矩阵上的交互式滚动游戏





 工商网监
工商网监
评论