 在英特尔开发者套件上用OpenVINO™ 2023.0加速YOLOv8-Pose姿态估计模型
在英特尔开发者套件上用OpenVINO™ 2023.0加速YOLOv8-Pose姿态估计模型
01
简介
《在英特尔开发者套件上用OpenVINO加速YOLOv8-seg实例分割模型》介绍了在英特尔者开发套件上使用 OpenVINO开发套件部署并测评 YOLOv8-Seg 的实例分割模型,本文将介绍在英特尔开发者套件上使用 OpenVINO2023.0 加速 YOLOv8-Pose 姿态估计(Pose Estimation)模型。

请先下载本文的范例代码仓,并搭建好 YOLOv8 的OpenVINO 推理程序开发环境:
git clone
https://gitee.com/ppovnuc/yolov8_openvino.git
02
导出 YOLOv8-Pose 姿态估计 OpenVINO IR 模型
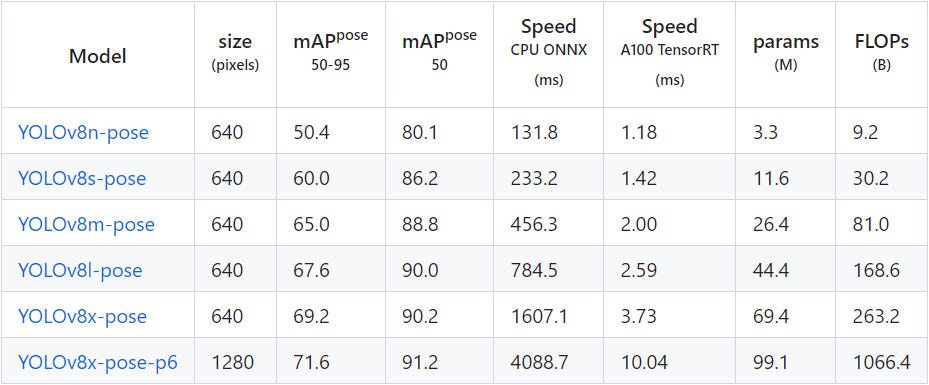
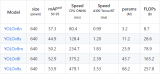
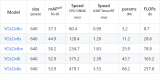
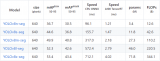
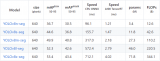
YOLOv8-Pose 的姿态估计模型有5种,在 COCOKeypoints 数据集完成训练,如下表所示。
COCOKeypoints 数据集请见:
http://cocodataset.org/
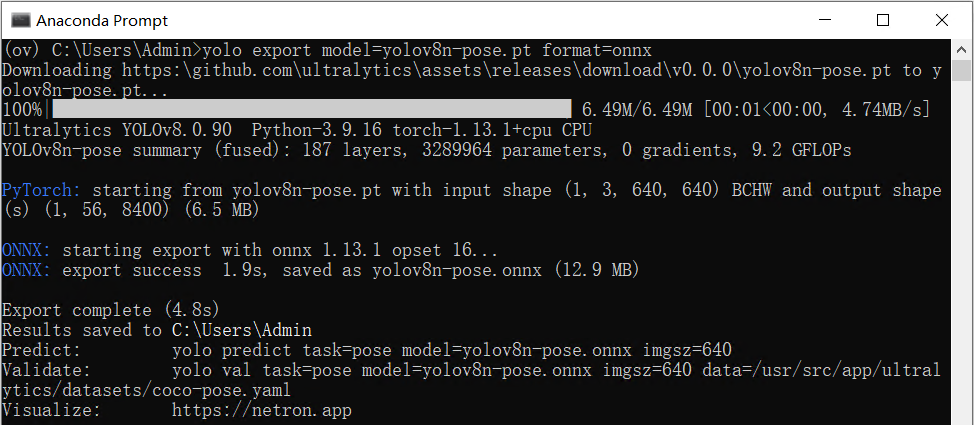
首先使用命令:
yolo export model=yolov8n-pose.pt format=onnx
向右滑动查看完整代码
完成 yolov8n-pose.onnx 模型导出,如下图所示:
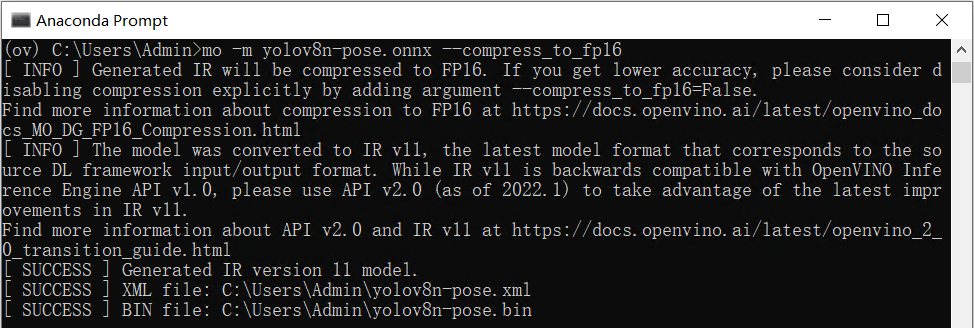
然后使用命令:
mo -m yolov8n-pose.onnx --compress_to_fp16
向右滑动查看完整代码
优化并导出 FP16 精度的 OpenVINO IR 格式模型,如下图所示:
03
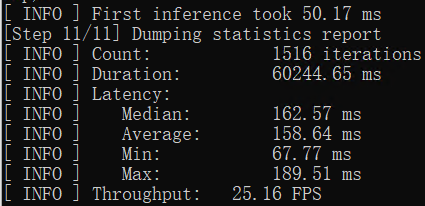
用 benchmark_app 测试 yolov8 姿态估计模型的推理计算性能
benchmark_app 是 OpenVINO工具套件自带的 AI 模型推理计算性能测试工具,可以指定在不同的计算设备上,在同步或异步模式下,测试出不带前后处理的纯 AI 模型推理计算性能。
使用命令:
benchmark_app -m yolov8n-pose.xml -d GPU
向右滑动查看完整代码
获得 yolov8n-pose.xml 模型在英特尔开发者套件的集成显卡上的异步推理计算性能,如下图所示:
04
使用 OpenVINO Python API编写 YOLOv8-Pose 姿态估计模型推理程序
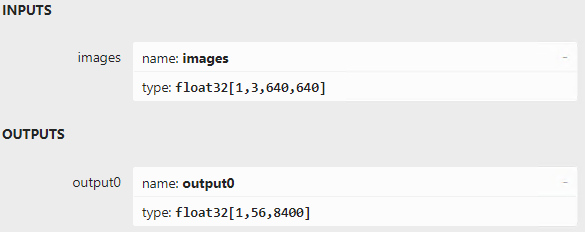
用 Netron 打开 yolov8n-seg.onnx 可以看到模型的输入和输出:
输入节点名字:“images”;数据:float32[1,3,640,640]
输出节点1的名字:“output0”;数据:float32 [1,56,8400],其中“8400”是指 YOLOv8 的3个检测头在 imgsz=640 时,有640/8=80,640/16=40,640/32=20,80x80+40x40+20x20=8400个输出单元格;“56”指 “Person” 类的中心坐标 cx,cy,w,h+“Person” 类的置信分数+“Person” 类的17个关键点([17,3]) = 56。
基于 OpenVINO Python API 的 YOLOv8 实例分割模型范例程序 yolov8_pose_ov_sync_infer_demo.py 的核心源代码,如下所示:
# 实例化Core对象
core = Core()
# 载入并编译模型
net = core.compile_model(f'{MODEL_NAME}.xml', device_name="GPU")
# 获得模型输出节点
output_node = net.outputs[0]
ir = net.create_infer_request()
cap = cv2.VideoCapture("store-aisle-detection.mp4")
while True:
start = time.time()
ret, frame = cap.read()
if not ret:
break
[height, width, _] = frame.shape
length = max((height, width))
image = np.zeros((length, length, 3), np.uint8)
image[0:height, 0:width] = frame
scale = length / 640
blob = cv2.dnn.blobFromImage(image, scalefactor=1 / 255, size=(640, 640), swapRB=True)
# 基于OpenVINO实现推理计算
outputs = ir.infer(blob)[output_node]
outputs = np.array([cv2.transpose(outputs[0])])
rows = outputs.shape[1]
# Postprocess
boxes = []
scores = []
preds_kpts = []
for i in range(rows):
classes_scores = outputs[0][i][4]
key_points = outputs[0][i][5:]
if classes_scores >= 0.5:
box = [
outputs[0][i][0] - (0.5 * outputs[0][i][2]), outputs[0][i][1] - (0.5 * outputs[0][i][3]),
outputs[0][i][2], outputs[0][i][3]]
boxes.append(box)
scores.append(classes_scores)
preds_kpts.append(key_points)
result_boxes = cv2.dnn.NMSBoxes(boxes, scores, 0.25, 0.45, 0.5)
detections = []
for i in range(len(result_boxes)):
index = result_boxes[i]
box = boxes[index]
pred_kpts = preds_kpts[index]
detection = {
'class_id': 0,
'class_name': 'person',
'confidence': scores[index],
'box': box,
'scale': scale}
detections.append(detection)
print(box[0] * scale, box[1] * scale, scale)
draw_bounding_box(frame, 0, scores[index], round(box[0] * scale), round(box[1] * scale),
round((box[0] + box[2]) * scale), round((box[1] + box[3]) * scale))
draw_key_points(frame, pred_kpts, 0.2, scale)
向右滑动查看完整代码
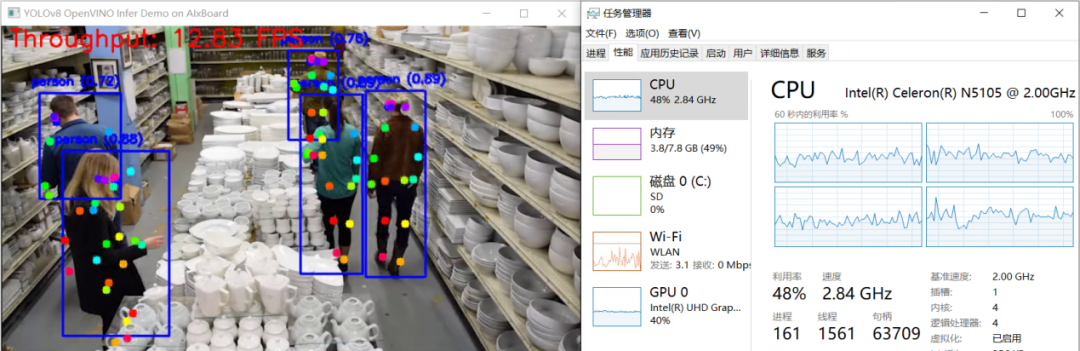
运行结果,如下图所示:
05
结论
英特尔开发者套件借助 N5105 处理器的集成显卡(24个执行单元)和 OpenVINO2023.0 ,可以在 YOLOv8-Pose 的姿态估计模型上获得相当不错的性能。通过异步处理和 AsyncInferQueue ,还能进一步提升计算设备的利用率,提高 AI 推理程序的吞吐量。
-
英特尔
+关注
关注
61文章
10038浏览量
172551 -
AI
+关注
关注
87文章
31964浏览量
270783
原文标题:在英特尔开发者套件上用OpenVINO™ 2023.0加速YOLOv8-Pose姿态估计模型 | 开发者实战
文章出处:【微信号:英特尔物联网,微信公众号:英特尔物联网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于C#和OpenVINO™在英特尔独立显卡上部署PP-TinyPose模型
SDK3.0中yolov8-pose用onnx转bmodel自动killed如何解决?
在AI爱克斯开发板上用OpenVINO™加速YOLOv8分类模型

用OpenVINO™ C++ API编写YOLOv8-Seg实例分割模型推理程序

使用英特尔开发者套件搭建RTMP流媒体服务器

使用OpenVINO优化并部署训练好的YOLOv7模型

基于OpenVINO在英特尔开发套件上实现眼部追踪
基于英特尔开发套件的AI字幕生成器设计
基于英特尔哪吒开发者套件平台来快速部署OpenVINO Java实战

【转载】英特尔开发套件“哪吒”快速部署YoloV8 on Java | 开发者实战

基于LabVIEW和YOLOv8-Pose的跳绳计数装置






 工商网监
工商网监
评论