 KUKA机器人中-TCP通讯数据传输
KUKA机器人中-TCP通讯数据传输
下面是KUKA机器人中-TCP通讯里的纯理论的东西. CAST_TO CAST_TO使得使用单个CWRITE语句处理多达4 KB的数据成为可能。CAST_TO将单个变量分组为一个缓冲区。然后,CWRITE将此缓冲区写入通道。 最大缓冲区大小:4 KB(= 4,096字节)。如果数据量太大,以致最大缓冲区大小不足,则必须使用几个连续的CWRITE语句。 CAST_TO不会触发提前运行停止,但是,如果处理的变量确实触发了提前运行stop,则间接触发提前运行停止。 如果使用CWRITE传输使用CAST_TO生成的缓冲区,则CWRITE语句中仅允许以下转换字符: r(=原始数据格式) s(=字符串格式) 与s相比,r具有以下优点: 如果传输了字符0,则将其整数表示为字符串的结尾。r不会发生此问题。 偏移量以字节为单位。如果CREAD用r即二进制读取数据,则可以使用偏移量轻松计算已传输的值的数量。 CAST_TO (Buffer, OFFSET, Var1 < , … , Var10 > ) Buffer: 类型:CHAR数组,将变量Var1…Var10写入的缓冲区. OFFSET: 类型:INT 缓冲区内的位置(以字节为单位),之后将数据写入缓冲区。偏移量从0开始。 Var1 … Var10 写入缓冲区的变量。每个语句最多可以有10个变量。 对于未初始化的变量或数组元素,会将随机值写入缓冲区。由于随机值可能会导致缓冲区接收器出现问题,因此建议初始化所有变量和数组元素。 CAST_FROM 如果缓冲区是在数据列表中声明的,则不能设置初始值! 原因:初始值被当前值覆盖。电流值可以高达4KB,因此超过了KRL线路的最大允许长度。 对的:DECL CHAR mybuffer[4096] 不正确:DECL CHAR mybuffer[4096]=" " CAST_FROM使得使用单个CREAD语句处理多达4 KB的数据成为可能。如果CREAD已从通道读取缓冲区,则CAST_FROM可以将缓冲区分解为各个变量。 最大缓冲区大小:4 KB(= 4,096字节)。如果数据量太大以至于最大缓冲区大小不足,则必须使用几个连续的CREAD语句。 CAST_FROM不会触发提前运行停止,但是,如果处理的变量确实触发了提前停止,则间接触发提前运行停止。 CAST_FROM ( Buffer , OFFSET, Var1 < , … , Var10 > )
| Buffer | 类型:CHAR数组 其数据用于填充变量Var1…Var10的缓冲器 |
| OFFSET | 类型:INT 缓冲区内的位置(以字节为单位),在该位置之后,数据被用来将它们写入变量Var1…Var10。偏移量从0开始。 示例: OFFSET=0:缓冲器从第一个位置开始使用。 OFFSET=2:缓冲器从第三个位置开始使用。位置1和2被忽略。 |
| Var1 … Var10 | 使用缓冲区中的数据写入的变量。每条语句最多可以有10个变量。每个变量从缓冲区接收的字节数由其数据类型决定。 INT变量1、BOOL变量2、REAL变量3 Var1接收4个字节;Var2接收1个字节;Var3接收4个字节。 |
CAST 语句中允许的数据类型
| INT | 4 bytes |
| REAL | 4 bytes |
| BOOL | 1 byte |
| CHAR | 1 byte |
| ENUM | 4 bytes |
| SIGNAL | 1 byte |
| FRAME | 6*REAL |
| POS | 6*REAL + 2*INT |
| AXIS | 6*REAL |
| E3POS | 6*REAL + 2*INT + 3*REAL |
| E3AXIS | 6*REAL + 3*REAL |
| E6POS | 6*REAL + 2*INT * 6*REAL |
| E6AXIS | 6*REAL + 6*REAL |
例如在EthernetKRL( )程序中设定的EKI_GetFrame: EKI_GetFrame从存储器读取 FRAME 类型的数值 示例 RET = EKI_GetFrame("Channel_1", "Root/TCP", MyFrame) 程序分析: GLOBAL DEFFCT EKI_STATUS EKI_GetFrame(strChannelName[]:IN,strPlace[]:IN,value:OUT) 声明变量: DECL CHAR strChannelName[] 字符串 DECL CHAR strPlace[] 字符串 DECL FRAME value FRAME坐标类型变量 DECL CHAR Buff[24]24长度的字符串 DECL STATE_T Stat 状态变量 DECL MODUS_T Mode DECL EKI_STATUS Ret EthernetKRL通讯专用变量 DECL INT Offset 设置模式: Mode = #SYNC设置同步模式 Ret = EKI_NULL_STATUS ret.buff=1 Offset = 0 Cast_To(Buff[], Offset,value) 将坐标变量写入缓冲区 CONTINUE CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Get",strChannelName[],strPlace[],Buff[],Ret.Buff, Ret.Read, TYPEFRAME,Ret.Connected) 使用”EFC_eki_Get”将Buff[] 里字符串坐标FRAME值通过EthernetKRL软件发出开通的通道,给PC上位机软件使用 Offset=0 Cast_From(Buff[], Offset,value)将缓存区里的值再发给变量 Ret.Msg_No = Stat.Msg_No RETURN Ret 发出反馈值 ENDFCT 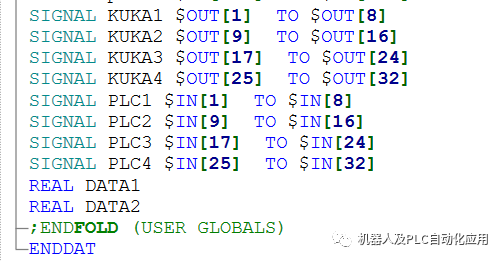
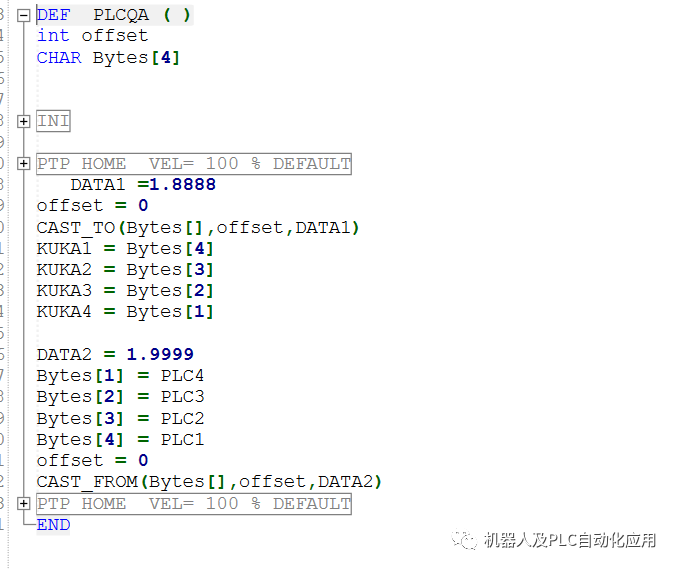 发送标准编码的real数据,PLC端可直接使用ID数据进行real数据的判断。(注:使用CAST_TO函数后,Bytes[1]为对应二进制的低位,Bytes[4]为高位。上面的KUKA1对应的bytes4是为了将PLC能直接读数据而不用通过SWAP指令进行转换)接收到的数据存于DATA2中。
发送标准编码的real数据,PLC端可直接使用ID数据进行real数据的判断。(注:使用CAST_TO函数后,Bytes[1]为对应二进制的低位,Bytes[4]为高位。上面的KUKA1对应的bytes4是为了将PLC能直接读数据而不用通过SWAP指令进行转换)接收到的数据存于DATA2中。
责任编辑:彭菁
-
数据传输
+关注
关注
9文章
1964浏览量
64899 -
通讯
+关注
关注
9文章
916浏览量
35139 -
KUKA机器人
+关注
关注
4文章
143浏览量
9195
原文标题:KUKA 机器人CAST_TO-CAST_FROM 数据传输
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
使用banana PI 作为管道机器人控制及数据传输
labviewTCP的数据传输的问题
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
tcp ip 数据传输
TCP/IP协议单片机在网络通信中的数据传输技术
LabView TCP数据传输的7个实例详细资料概述






 工商网监
工商网监
评论