 新型iMEMS角速率检测陀螺仪
新型iMEMS角速率检测陀螺仪
John Geen 和 David Krakauer
ADI公司的ADXRS150和ADXRS300陀螺仪的满量程范围为150°/s和300°/s,代表了陀螺仪技术的一次量子飞跃。作为首款带有集成电子元件的商用表面微加工角速率传感器,它们比任何具有类似功能的陀螺仪都更小,功耗更低,抗冲击和振动能力更好。这一真正的突破之所以成为可能,是因为ADI公司专有的集成微机电系统(iMEMS)工艺,该工艺已在数百万个汽车加速度计中使用。
产品描述
陀螺仪用于测量角速率——物体转动的速度。旋转通常参考以下三个轴之一进行测量:偏航、俯仰或滚动。
图1显示了相对于安装在平面上的封装的每个灵敏度轴的示意图。具有一个灵敏度轴的陀螺仪也可用于通过不同安装陀螺仪来测量其他轴,如右图所示。在这里,偏航轴陀螺仪(如ADXRS150或ADXRS300)安装在其侧面,使偏航轴成为横滚轴。
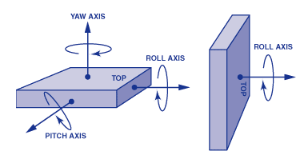
图1.旋转灵敏度的陀螺仪轴。根据陀螺仪通常的位置,其灵敏度主轴可以是三个运动轴之一:偏航、俯仰或滚动。ADXRS150和ADXRS300是偏航轴陀螺仪,但它们可以通过适当的安装方向测量绕其他轴的旋转。例如,在右侧:偏航轴设备定位用于测量侧倾。
作为如何使用陀螺仪的一个例子,安装在以 33 1/3 rpm(每分钟转数)旋转的转盘上的偏航轴陀螺仪将测量 360° 乘以 33 1/3 rpm 除以 60 秒或 200°/s 的恒定旋转。陀螺仪将输出与角速率成比例的电压,由其灵敏度决定,以毫伏每秒度(mV / °/ s)为单位。满量程电压决定了可以测量的角速率,因此在转盘示例中,陀螺仪需要具有至少对应于200°/s的满量程电压。满量程受可用电压摆幅除以灵敏度的限制。例如,ADXRS300的满量程为1.5 V,灵敏度为5 mV/°/s,处理300°/s的满量程。ADXRS150的满量程更有限,为150°/s,但灵敏度更高,为12.5 mV/°/s。
一个实际应用是通过在车内安装陀螺仪来测量汽车的转弯速度;如果陀螺仪感觉到汽车正在失控,差速制动就会启动以使其重新控制。角速率也可以随时间进行积分以确定角位置 - 当卫星信号短时间丢失时,对于保持基于GPS的导航的连续性特别有用。
科里奥利加速
ADI公司的ADXRS陀螺仪通过科里奥利加速度测量角速率。科里奥利效应可以解释如下,从图 2 开始。考虑一下自己站在靠近中心的旋转平台上。您相对于地面的速度如图 2 中的蓝色箭头长度所示。如果您要移动到平台外边缘附近的点,您的速度将相对于地面增加,如较长的蓝色箭头所示。由径向速度引起的切向速度增加率是科里奥利加速度(以法国数学家加斯帕德·G·德·科里奥利斯(Gaspard G. de Coriolis,1792-1843)的名字命名)。
如果Ω是角速率并且是半径,则切向速度为 Ωr。因此,如果 r 以速度 v 变化,则会出现切向加速度 Ωv。这是科里奥利加速度的一半。还有一半来自改变径向速度的方向,总共得到2Ωv(见附录)。如果你有质量M,平台必须施加一个力,2MΩv,以引起这种加速度,质量经历相应的反作用力。
图2.科里奥利加速度示例。向北向旋转平台外边缘移动的人必须增加向西的速度分量(蓝色箭头)以保持北行路线。所需的加速度是科里奥利加速度。
ADXRS陀螺仪利用这种效应,使用类似于人在旋转平台上移出和移入的共振质量。质量由多晶硅微加工而成,并拴在多晶硅框架上,因此它只能沿一个方向共振。
图3显示,当共振质量向旋转的外边缘移动时,它向右加速并向左对框架施加反作用力。当它向旋转中心移动时,它会向右施加力,如橙色箭头所示。
为了测量科里奥利加速度,包含共振质量的框架通过弹簧相对于共振运动以90°拴在基板上,如图4所示。该图还显示了科里奥利感应手指,用于电容感应框架的位移,以响应质量施加的力,如下所述。如果弹簧具有刚度 K,则由反作用力产生的位移将为 2 ΩvM/K。
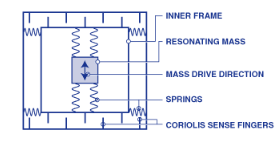
图4.陀螺仪的机械结构示意图。
图5显示了完整的结构,表明随着共振质量的移动,以及陀螺仪安装的表面的旋转,质量及其框架经历科里奥利加速度,并从振动运动中平移90°。随着旋转速率的增加,质量的位移和从相应电容获得的信号也会发生变化。
应该注意的是,陀螺仪可以放置在旋转物体上的任何位置和任何角度,只要其感应轴平行于旋转轴即可。上述解释旨在直观地了解该功能,并通过陀螺仪的放置进行了简化。
电容式传感
ADXRS陀螺仪通过连接到谐振器的电容式传感元件测量谐振质量及其框架因科里奥利效应引起的位移,如图4、5和图6所示。这些元件是硅束,与连接到基板上的两组固定硅束相互指射,从而形成两个标称相等的电容器。由于角速率引起的位移在该系统中会产生差分电容。如果总电容为C,光束间距为g,则差分电容为2 ΩvMC/gK,与角速率成正比。这种关系的保真度在实践中非常好,非线性小于0.1%。
ADXRS陀螺仪电子器件可以分辨小至12×10的电容变化–21法拉(12 齐法)来自小至 0.00016 埃(16 飞米)的光束偏转。在实际设备中可以利用的唯一方法是将电子设备(包括放大器和滤波器)与机械传感器放在同一芯片上。差分信号在谐振器频率处交替,可以通过相关从噪声中提取。
图5.框架和共振质量体响应科里奥利效应横向位移。位移由框架上的科里奥利感应手指与连接到基板上的手指之间的电容变化决定。
这些亚原子位移作为光束表面的平均位置是有意义的,即使表面上的单个原子随机移动得更多。大约有10个12电容器表面上的原子,因此其各个运动的统计平均将不确定性降低了 10 倍6.那么,为什么我们不能做得更好100倍呢?答案是,空气分子的撞击导致结构移动——尽管平均值相似,但它们的影响要大得多!那么为什么不去除空气呢?该设备不是在真空中运行的,因为它是一种非常细的薄膜,仅重 4 微克;它的弯曲只有1.7微米宽,悬浮在硅衬底上。空气缓冲结构,防止其被猛烈的冲击破坏 - 即使是在榴弹炮发射制导炮弹时所经历的冲击(如最近所示)。
图6.机械传感器的照片。ADXRS陀螺仪包括两种结构,可实现差分检测,从而抑制环境冲击和振动。
特征
电子元件和机械元件的集成是ADXRS150和ADXRS300等产品的关键特性,因为它可以在给定的性能水平下实现最小的尺寸和成本。图7是ADXRS芯片的照片。
图7.ADXRS陀螺仪芯片的照片,突出了机械速率传感器和信号调理电子器件的集成。
ADXRS150和ADXRS300采用行业标准封装,可简化用户的产品开发和生产。陶瓷封装是一个 32 引脚球形网格阵列 (BGA),尺寸为 7 mm 宽 x 7 mm 深 x 3 mm 高。它比具有类似性能的任何其他陀螺仪至少小 100 倍。除了体积小外,这些陀螺仪消耗30 mW,远低于类似的陀螺仪。小尺寸和低功耗的组合使这些产品非常适合消费类应用,如玩具机器人、踏板车和导航设备。
抗冲击和振动能力
陀螺仪用户最关心的问题之一是设备能否可靠地提供准确的角速率输出信号,即使在存在环境冲击和振动的情况下也是如此。这种应用的一个例子是汽车侧翻检测,其中陀螺仪用于检测汽车(或SUV)是否正在翻车。某些翻车事件是由与另一个物体(例如路缘石)的撞击触发的,从而导致车辆受到冲击。如果冲击使陀螺仪传感器饱和,并且陀螺仪无法将其过滤掉,则安全气囊可能无法展开。同样,如果道路上的颠簸导致冲击或振动转化为旋转信号,安全气囊可能会在不需要时展开——这是一个相当大的安全隐患!
如图6和图7所示,ADXRS陀螺仪采用一种新的角度速率检测方法,可以抑制高达1,000g的冲击——它们使用两个谐振器来差分检测信号,并抑制与角运动无关的共模外部加速度。这种方法是ADXRS陀螺仪对冲击和振动具有出色抗扰度的部分原因。图6中的两个谐振器在机械上是独立的,并且它们以反相方式工作。因此,它们测量相同的旋转幅度,但给出相反方向的输出。因此,两个传感器信号之间的差异用于测量角速率。这样可以消除影响两个传感器的非旋转信号。信号在非常灵敏的前置放大器之前的内部硬接线中组合。因此,极端加速度过载在很大程度上被阻止到达电子设备,从而允许信号调理在大冲击期间保持角速率输出。该方案要求两个传感器匹配良好,彼此精确制造的副本。
总结
ADI公司利用其iMEMS工艺实现了突破,开发出了世界上首款完全集成的角速率传感器。集成带来了可靠性、尺寸和价格的革命。其结果是陀螺仪适用于比以前认为可能或负担得起的更广泛的应用。该设备的低功耗和小尺寸将使使用电池运行的小型消费和工业产品受益,例如玩具,踏板车和便携式仪器。对冲击和振动的巨大抗扰度有利于汽车和其他受到恶劣环境条件影响的应用。
展望未来,可以利用iMEMS工艺和陀螺仪设计技术来实现更高水平的集成。正如ADI公司开发双轴加速度计一样,也可以生产多轴陀螺仪。甚至可以在单个芯片上集成加速度计和陀螺仪。由此产生的惯性测量单元甚至可以使微型车辆能够稳定和自主导航。
附录
二维运动
考虑位置坐标,z = rεs,在复平面中。关于时间的微分,t,速度是
这两个项分别是径向分量和切向分量,后者由角速率产生。再次区分,加速度是

第一项是径向线性加速度,第四项是由角加速度产生的切向分量。最后一项是约束 r 所需的熟悉的向心加速度。第二项和第三项是切向的,是科里奥利加速度分量。它们分别由径向速度的变化方向和切向速度的变化大小产生。如果角速率和径向速度恒定,
然后
其中角分量,iεs,表示科里奥利加速度、2Ωv 和 –ε 的正 u 意义上的切向方向s表示朝向中心(即向心)表示Ω2r 组件。
审核编辑:郭婷
-
传感器
+关注
关注
2554文章
51655浏览量
758237 -
陀螺仪
+关注
关注
44文章
798浏览量
99124 -
iMEMS
+关注
关注
0文章
14浏览量
8592
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论