 推导电容传感加速度计的传递函数
推导电容传感加速度计的传递函数

在本系列的部分中,我们讨论了质量-弹簧-阻尼器(或质量-阻尼器-弹簧)结构可用于测量加速度。为了使质量块位移与施加的加速度成正比,应适当选择质量块-弹簧-阻尼器系统的不同参数。本文将使用经典力学的概念推导质量-弹簧-阻尼系统的传递函数。
传递函数使我们能够描述质量块如何响应外部加速度而移动。在解释加速度计的不同参数(例如传感器线性工作范围和带宽规格)时,将在本系列的后续文章中使用导出的传递函数。
然而,在尝试推导传感器传递函数之前,让我们简要介绍一下微机电系统 (MEMS) 技术,该技术使当今的小型低成本惯性传感器成为可能。
MEMS 加速度计:使用质量弹簧阻尼器结构测量加速度
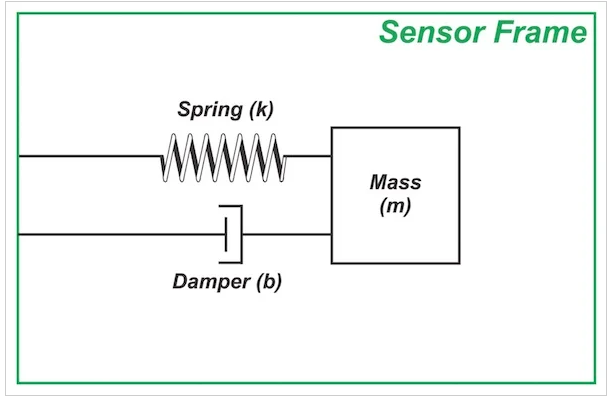
用于感测加速度的质量-弹簧-阻尼器结构如图 1 所示。
MEMS 技术使我们能够在同一硅芯片上实现该机械系统的非常小版本以及所需的信号调节电子设备,从而拥有完整的传感解决方案。
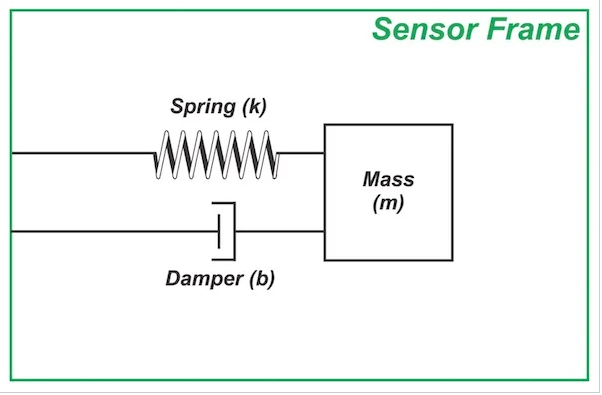
图 1. 质量-弹簧-阻尼器结构。
MEMS 技术借鉴了微电子行业的基于光刻的微加工技术,并将它们与其他专门的制造技术相结合,从而能够在硅芯片上创建可移动部件。
微制造技术的进步帮助实现了今天的小型、低成本微机械加速度计,图 2 显示了一个示例。
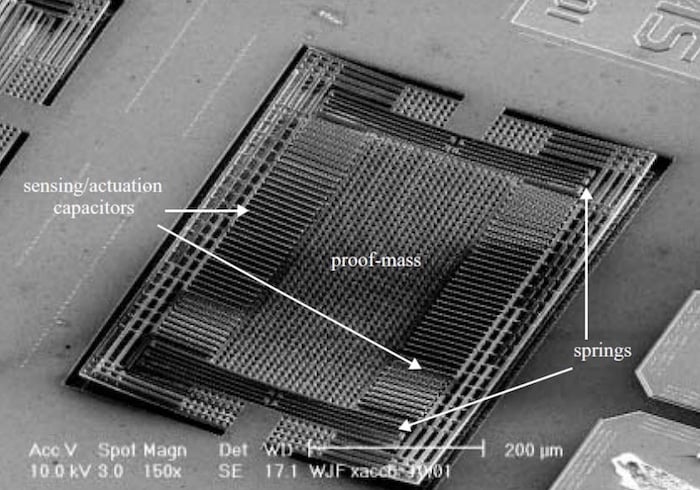
图 2. CMOS MEMS 加速度计的扫描电子显微照片 (SEM)。图片由K. Zhang提供
在上一篇文章中,我们简要提到了阻尼器在加速度计操作中起着至关重要的作用。在尝试推导质量-弹簧-阻尼器系统的传递函数之前,现在是进一步熟悉系统的这一重要部分的好时机。
MEMS 加速度计中的阻尼机制
阻尼器模拟耗散力,该耗散力会减少质量-弹簧-阻尼器系统的机械能并减慢检验质量的运动。
MEMS 加速度计中的主要阻尼机制之一是运动质量与周围空气分子之间发生的内部摩擦。事实上,可以在极低的压力下封装基于 MEMS 的加速度计,以减少空气阻尼的影响。然而,一般而言,空气阻尼是 MEMS 加速度计中能量损失的主要。
其他常见的阻尼源是结构阻尼和热阻尼。
结构阻尼考虑了由 MEMS 器件中使用的组件结构引起的能量损失。
热阻尼对应于 MEMS 结构的应力-应变关系随温度变化的偏差。阻尼器施加在验证质量上的总减速力通常建模为与验证质量的速度成比例的力。
该力的作用方向与质量运动相反,由下式给出:
[F_{阻尼器} = bv ]
其中 b 表示阻尼系数,v 表示质量块的速度。
请注意,当物体非常小时,空气阻力与物体的速度成正比,微加工结构就是这种情况。
一般来说,空气阻力与 物体的速度有着复杂的关系。例如,一个大物体,例如在空中移动的跳伞者,会受到与物体速度的平方成正比的阻力。
阻尼效应:需要还是讨厌?
由于阻尼源自耗散力,因此它可能看起来是一种应该避免的麻烦。事实上,许多 MEMS 加速度计设计为只有少量阻尼(以降低系统的噪声)。
但需要注意的是,没有阻尼的理想质量弹簧系统实际上是一个振荡器,不能用作加速度计。
如果我们将“理想”弹簧质量系统的质量从平衡状态移开然后释放它,即使没有向系统施加外部加速度,质量也会永远来回运动。这就是为什么对于加速度计,我们需要至少向弹簧质量系统引入少量阻尼。
使用牛顿运动定律证明质量位移
假设如图 3 所示,外力作用于传感器框架。
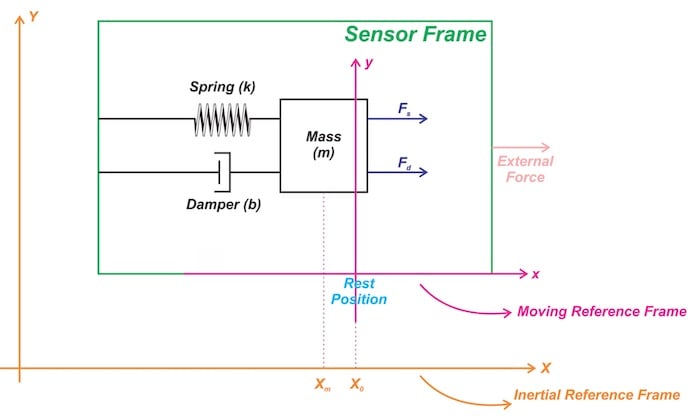
图 3. 对外力作出反应的质量-弹簧-阻尼器结构传感器框架。
为了根据施加的加速度计算质量块位移,我们使用牛顿第二运动定律。正如您可能知道的那样,该定律指出,合力产生的物体加速度与合力的大小成正比,与物体的质量成反比。
这由以下熟悉的等式表示:
[F=马]
公式 1
其中 F 是施加在身体上的合力,m 是身体的质量,a 表示加速度。
要将此等式正确地应用到我们的系统,这里应该注意一个微妙的点。牛顿第二运动定律只适用于惯性坐标系,即不加速的坐标系。
图 3 描绘了我们的加速度计的两个不同坐标系。橙色坐标系对应于在解决物理问题时假定为惯性的地球参考系。
然而,品红色坐标系表示固定到传感器框架的参考系。
该坐标系是非惯性的,因为当向传感器施加外力时它会加速。因此,要找到质量块的运动方程,我们应该使用惯性参考系(橙色坐标系)。
什么力作用于证明质量?
假设如图3所示,X 0和X m分别表示质量块的静止位置和任意时刻质量块的位置。在正 X 方向的外力作用下,传感器框架向右加速。初,质量块由于其惯性而倾向于“后退”。这会改变检测质量相对于传感器框架的相对位置,并将弹簧压缩 X 0 – X m。压缩的弹簧对质量块施加力并将其向右推。
弹簧施加的力由下式给出:
[F_s = k (X_0 - X_m) ]
公式 2
当质量块偏离平衡时,阻尼器施加一个与质量块相对于静止位置的相对速度成正比的力,我们得到:
[F_d = b (dot X_0 - dot X_m) ]
公式 3
在上面的等式中,点符号用于显示变量相对于时间的一阶导数。请注意,位置的导数是速度。
应用等式 1,我们得到:
[F_s + F_d = ma_{证明质量} ]
代入等式 2 和 3,我们得到
[ k (X_0 - X_m) + b (dot X_0 - dot X_m) = m ddot X_m ]
方程式 4
在这个等式中,双点符号表示 X m相对于时间的二阶导数。请注意,? m是验证质量的加速度。
求非惯性参考系中的运动方程
需要根据质量块从其平衡位置的位移来重写方程式 4。这是因为我们在实践中的传感方法测量的是质量块偏离其平衡状态的位移。
例如,如图 4 所示,电容式感应方法测量检测质量块相对于静止位置的位移。
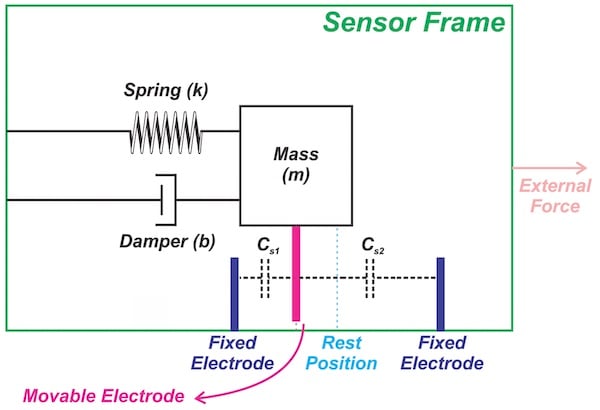
图 4.通过电容感应测量质量块位移的设置 。有关更多信息,请查看本系列的上一篇文章。
为了根据质量位移来表达方程式 4,我们需要使用图 3 中洋红色坐标系所示的移动参考系。我们使用小写字母 x 和 y 表示该坐标系。
如您所见,验证质量位移由 X m – X 0 = x给出。
在这种情况下,公式 4 简化为:
[ -kx - b dot x = m ( ddot X_0 + ddot x) ]
由于 ? 0 是传感器坐标系上的一个不动点,它的二阶导数等于传感器坐标系 a 的加速度。这其实就是我们要衡量的参数。
因此,上述等式导致:
[ m ddot x + b dot x + kx = -ma ]
寻找传递函数
应用拉普拉斯变换,我们可以找到加速度计的传递函数为:
[ H(s) = frac{x(s)}{a(s)} = frac{-1}{s^2 + frac{b}{m}s + frac{k}{m }} ]
这是一个二阶系统。根据系统参数的值,即 m、k 和 b,系统响应将不同。
例如,如果传感器帧加速度突然从零变为有限值(阶跃输入),则系统的输出将接近其终值,其时间响应特性由系统参数确定。
图 5 显示了改变系统参数如何改变输出的振铃和稳定时间。在我们的讨论中,输出是证明质量位移。
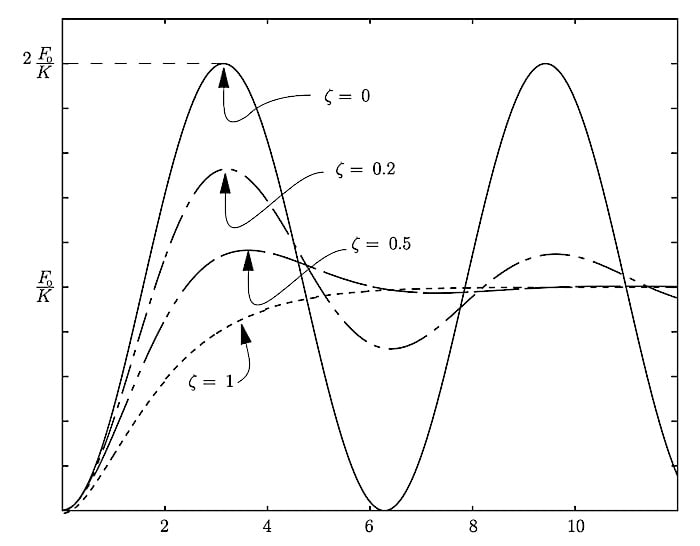
图 5.二阶系统的阶跃响应会根据系统参数的值发生显着变化。图片由麻省理工学院 David L. Trumper提供
在下一篇文章中,我们将使用导出的传递函数来讨论一些重要的系统参数,例如传感器线性工作范围、响应误差和带宽。
-
mems
+关注
关注
129文章
4551浏览量
199857 -
加速度计
+关注
关注
6文章
826浏览量
48378
发布评论请先 登录
两轴加速度计和三轴加速度计的使用区别?
基于加速度计的倾角测量精度提高
2460-010加速度计
2227-050加速度计模块
1410L-100加速度计
1527J-010加速度计
1521L-200加速度计
推导电容式感应加速度计的传递函数
浅谈Mems电容式加速度计的种类及结构
推导电容传感加速度计的传递函数



评论