 主流OEM电子电气架构的演变进度
主流OEM电子电气架构的演变进度
现在汽车的电子电气架构逐步在更新,越来越多的ECU进行整合,从原来的分布式阶段逐步演进到域控制器和中央计算架构。在架构演进过程中,支撑这一变革的底层芯片也在逐步发展,越来越多的主机厂关注的是一整套的解决方案,而不是独立的芯片解决单独的区域。面向未来电子电气架构核心区域进行全场景布局的芯片厂商,将具备更明显的竞争优势。
主流OEM电子电气架构的演变进度
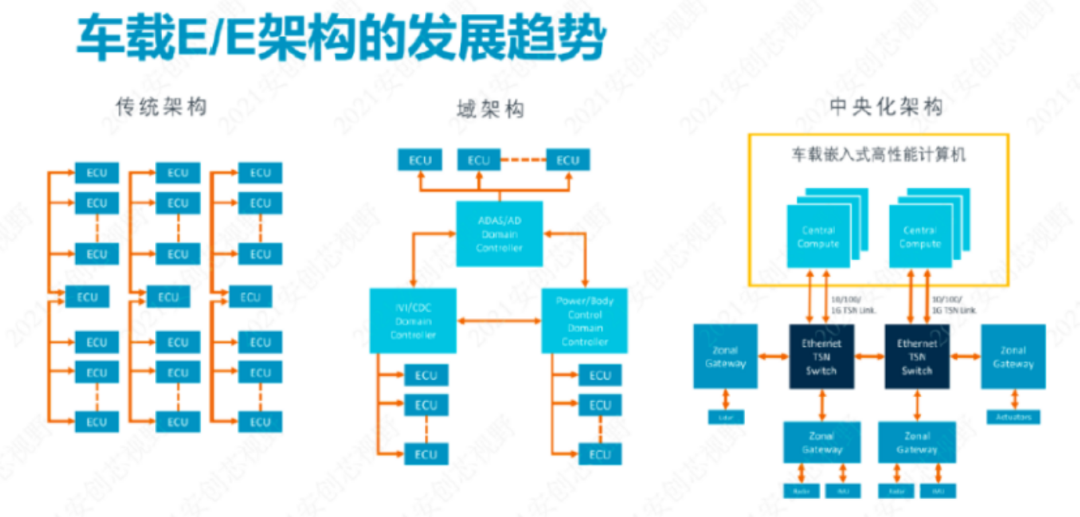
博世认为汽车电子电气架构演变路径为分布式、域集中、中央集中式。电子电气架构逐步成为汽车产品的一个核心技术,过去汽车上的控制器相互独立,软件为嵌入式,整车做最终的集成即可,随着分布式架构朝着域控制器,主机厂自己掌握中央控制系统,否则就会失去对汽车产品的控制权。
特斯拉Model3开启了电子架构的变化,实现了中央域控制架构的雏形,被行业认为在电子电气架构方面领先传统车企6年以上。大部分车企的跨域电子电气架构在2023年量产,比如今年量产的小鹏G9;一些传统车企电子架构仍处于功能域早期,呈现“分布式ECU+域控制器”的过渡形态,向“中央计算单元+区域控制器”将可能耗时3-10年。我们来看看主流的主机厂和tier1的电子电气架构发展进程。
1.1 大众的电子电气架构
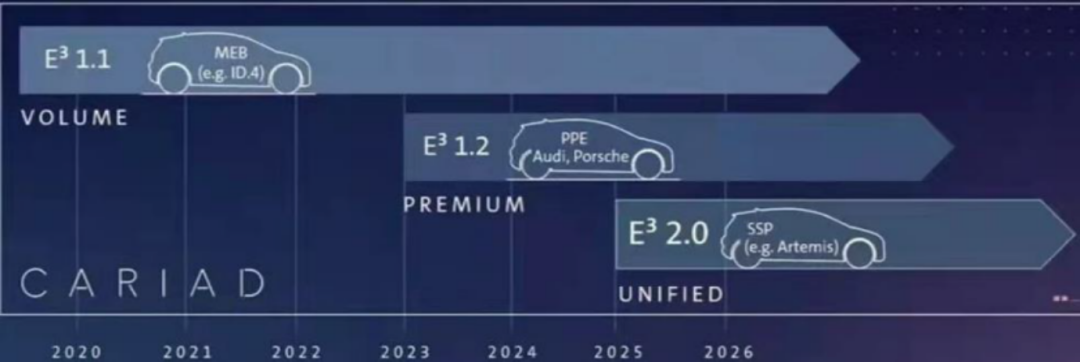
大众汽车MQB平台在2012年研发出来,到现在已经11年了,该平台售卖的车型超过3600W台,MQB平台的电子电气架构就是分布式,在平台升级为MEB的平台时,ID系列采用了E3架构。目前大众的ID系列的电子电气架构还处于E3 1.1版,在今年的PPE平台上搭载E3 1.2版本,从路径规划来看在2025年才能进化到E3 2.0版。
大众的MEB平台(首款车ID3)的E3架构
E3架构即由3个车辆应用服务器(ICAS,即In-Car Application )组成的新型集中式EE架构,具体包括:车辆控制服务器(ICAS1)、智能驾驶服务器(ICAS2)和智能座舱域(ICAS3);其中智能驾驶域ICAS2还在开发过程中,量产车型上搭载的依然是分布式架构方案。
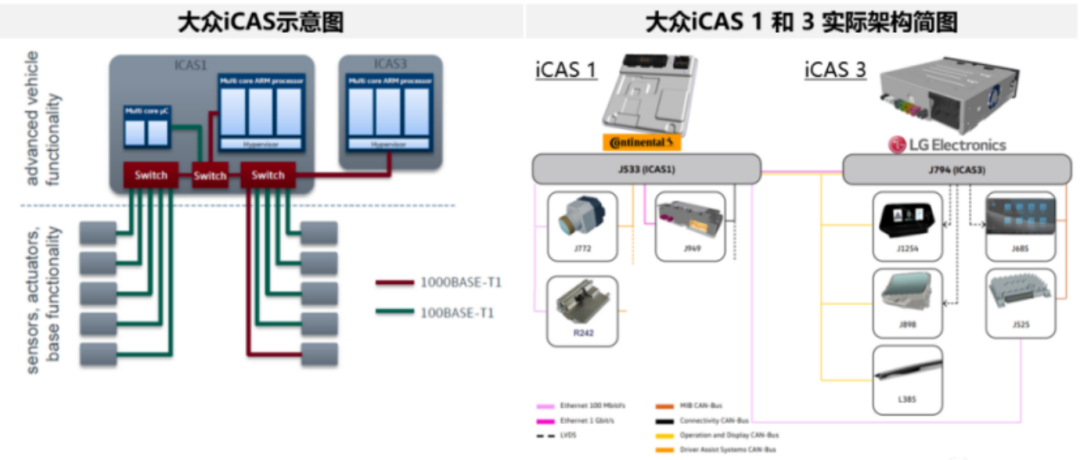
综合来看,大众还是比较稳扎稳打,一步一步进行渐进式的架构推进,并没有直接采用中央式架构,由此看的出来大众是那种稳中求胜的选手。
1.2 小鹏的电子电气架构
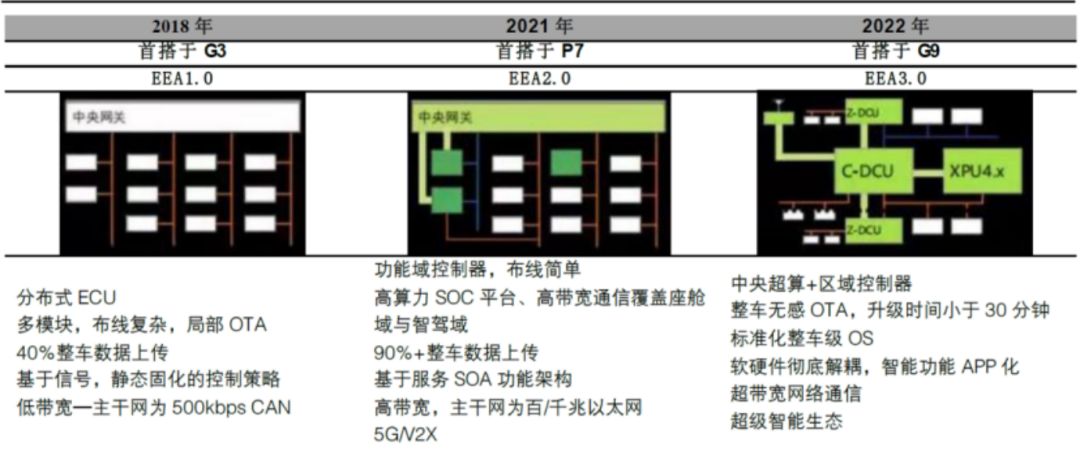
小鹏的电子电气架构最近这几年的演进非常不错,在G3采用的电子架构还是传统的架构时,在P7就升级为功能域控制器,而且该电子电气架构在那个时间节点都是非常领先的。
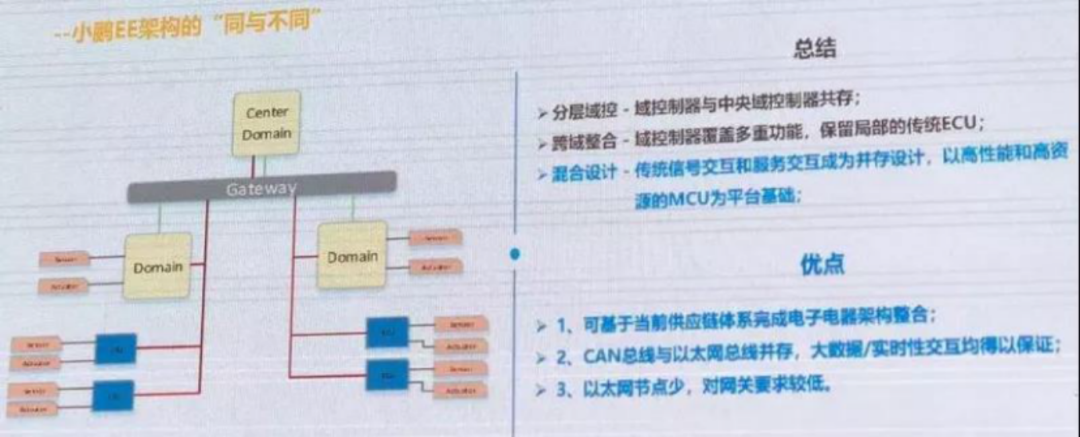
小鹏P7的搭载的第二代电子电气架构, ECU数量减少了60%,分层域控,也就是功能域控制器和中央域控制器并存,域控制器覆盖多重功能,保留了局部传统的ECU。大部分车身功能迁移到域控制器,中央处理器可以实现仪表、中控导航和智能车身控制的大部分功能,而且集成中央网。
在刚刚量产的G9车型中,小鹏的电子电气架构已经迭代到X-EEA 3.0版本了,成为首款可以支持 XPILOT 4.0的智能辅助驾驶系统的量产车。
通过上图可以看到X-EEA 3.0硬件架构方面,采用了中央超算+区域控制的硬件架构,中央超算包括车控、座舱、智驾3个域控制器,区域控制器分为左右控制器,将更多控制件分区,类似于特斯拉的架构,采用就近分配的原则,分区接管相应功能,大幅缩减线束。
1.3 特斯拉的电子电气架构
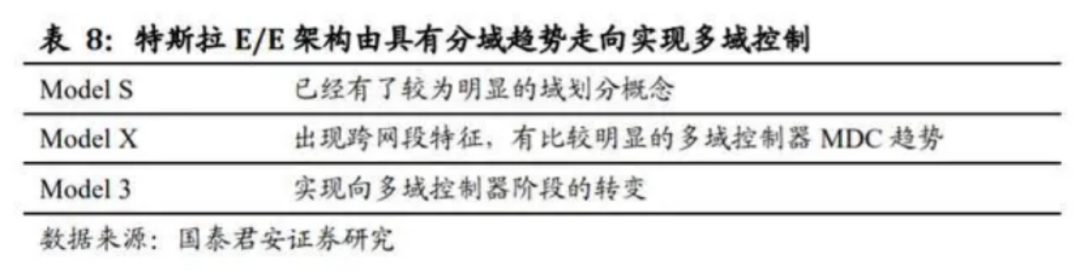
特斯拉在电子电气架构方面是先驱者,2012年的model S有较为明显的功能域,包括动力域 PowerTrain、底盘域 Chassis、车身域 ,ADAS模块横跨了动力和底盘域。
Model X 的部分控制器出现跨网段的特征,有比较明显的多域控制器MDC 趋势。比如中央车身控制器 Central Body Control Module 横跨了底盘 Chassis、车身低速容错 Body FT 以及车身 Body。2017年特斯拉推出的model 3突破了功能域的框架,实现中央计算+区域控制器的框架。
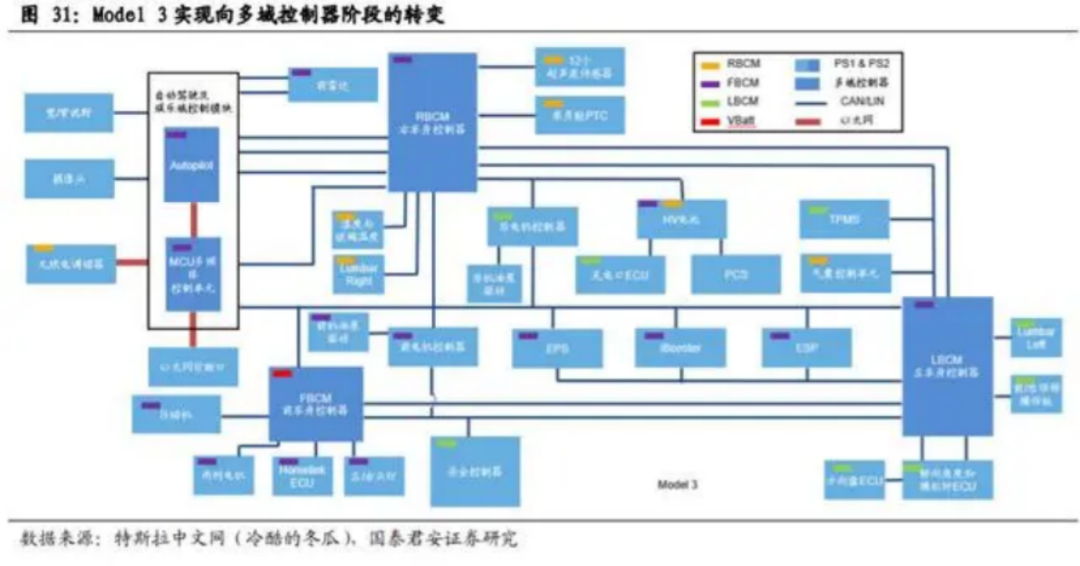
Model 3 标志着特斯拉从域控制器的阶段直接进入多域控制器阶段。单个控制器可以对接到传统意义下不同功能的传感器,通过一块 ECU 来接入不同的传感器得到的数据,对其进行分析,最终发出控制的指令。
Model 3 四大控制器 AICM(辅助驾驶及娱乐控制模块)、BCM RH(右车身控制器)、BCM LH(左车身控制器)以及 BCM FH(前车身控制器)控制着整辆车几乎所有的功能。
特斯拉三代车的电子电气架构演进的本质原因,是不断把车辆功能的控制权收回到自主开发的过程,model3的自动驾驶模块、娱乐控制模块、其他区域控制器、热管理都是自己进行开发设计,实现了关键核心模块掌握在自己手里,避免被别人卡脖子,即使刹车系统使用博世的ibooster,特斯拉也参与一脚,把自己的软件加入到这个模块里面,通过软件更新实现刹车距离变短。
大部分企业规划的跨域融合的电子电气架构在2022年和2023年量产,基本上逐步开始域控制器,减少分布式ECU。2025年部分车企落地中央计算+区域控制器的电子电气架构,从而实现软硬件进一步的集成化,让车厂对于软件的控制权往回收。
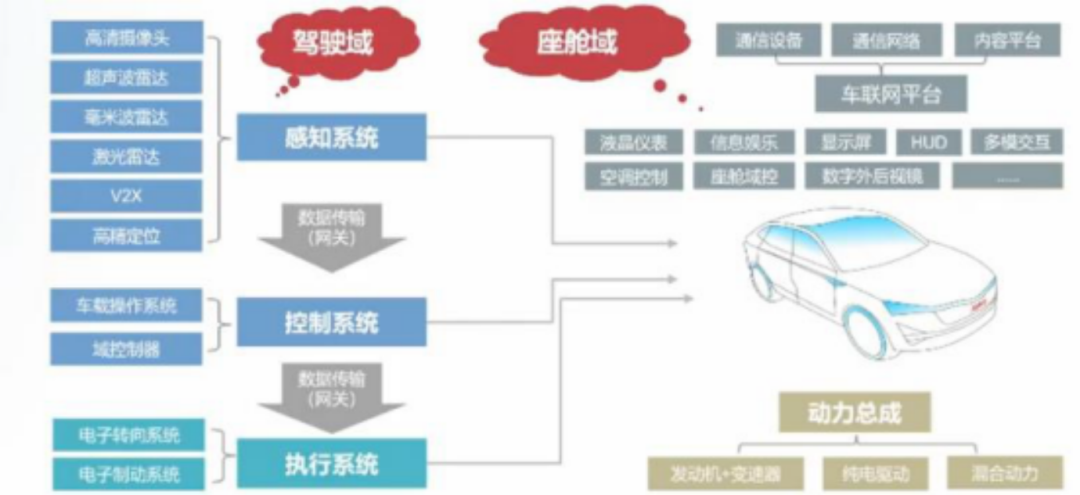
头部主机厂公布的下一代电子电气架构,将实现车辆功能域的进一步集成:“五域”(自动驾驶域+动力域+底盘域+座舱域+车身域)逐步向集成度更高的“三域”(自动驾驶域+智能座舱域+车控域+若干网关)迈进,即:除智驾域、座舱域外,将底盘、动力传动以及车身三大功能域直接整合成一个“整车控制域(Vehicle Domain Controller,VDC)”。
在这个过程中,越来越多的主机厂关注的是一整套的解决方案,而不是独立的芯片解决单独的区域。除了主机厂外,Tier 1和芯片厂商也在深入探索跨域融合和中央计算架构的演进,在产品、架构和解决方案上与主机厂节奏保持一致。
核心域控芯片竞争格局
如果我们按照整车三大架构来进行分析:
根据安全性排序:车身底盘动力域>自动驾驶域>座舱域
从产品形态变化、产业链格局演变情况来看:座舱域>自动驾驶域>车身底盘动力域
由于目前座舱域在硬件上与底层的控制和算法做了物理隔离,能够看到主机厂在座舱方面的尝试最为激进,最典型的代表就是车内大屏与液晶仪表盘的渗透率快速提升。
而车身动力域由于安全性要求最高,并且和底层控制深度耦合,因此无论是产品形态还是产业链的格局,相对变化都较小。而自动驾驶域因为对算力要求远超从前,因此产业链逐步增加了新的供应商。
而这几个域里面,驾驶辅助/自动驾驶域、智能座舱域为汽车未来核心,因为这些域是直接关联用户体验感受的,是目前提升空间最大的。
2.1智能座舱
可以看到有很多科技公司和传统的车载芯片公司,都在全力以赴进行智能座舱域控制器芯片的布局。
智能座舱域控制器芯片市场主要玩家:
1.海外传统汽车芯片厂商,主打中低端市场:NXP、德州仪器、瑞萨电子等;
2.海外手机领域的厂商,主打高端市场:联发科、三星、高通等。
3.国内新兴智能车芯竞争者:芯驰科技等。
随着智能座舱时代的到来,除了常见的“一芯多屏”功能,对于座舱主芯片的算力,架构、外设都有更高的要求,特别是安全层面,这样才能更好地保护用户在智能座舱的数据安全和稳定性。
案例介绍:芯驰X9系列处理器
X9系列处理器集成了高性能CPU、GPU、AI加速器,以及视频处理器,能够满足新一代汽车电子座舱应用对强大的计算能力、丰富的多媒体性能等日益增长的需求。可支持一芯多屏,同时覆盖全液晶仪表、中控娱乐导航、副驾娱乐、抬头显示、电子后视镜、DMS驾驶员监测系统、OMS乘客监测系统、虚拟空调面板、360环视+APA自动泊车辅助、DVR行车记录仪、语音系统等所有座舱功能,支持舱泊一体。
同时,X9系列处理器集成了PCIe3.0、USB3.0、千兆以太网、CAN-FD,能够以较小造价无缝衔接应用于车载系统。该款处理器还采用了包含Cortex-R5双核锁步模式的安全岛,能应用于对安全性能要求严苛的场景。
智能座舱的主控芯片对于安全性越来越高,特别是要带动仪表屏,这部分对于安全方面的功能安全至少要达到ASIL-B的功能安全,在安卓中控死机的情况下,依旧能保障仪表的正常运行。
刚过去不久的上海车展上,芯驰发布了X9系列的最新产品X9SP。
X9SP产品特性
- 12核ARM Cortex-A55处理器,100KDMIPS
- Imagination PowerVR 3D GPU,220GFLOPS
- 针对汽车应用场景优化的NPU, 8 TOPS
- 车规级ISP,高达1Gpixel/s图像处理能力,支持800万像素摄像头输入
- 高性能VPU,支持H.264/H.265/MJPEG编解码,4Kp60
- 2路MIPI CSI / 2路MIPI DSI / 4路LVDS输出
- 内置安全岛,集成一组800MHz双核锁步ARM Cortex-R5F MCU
-内置硬件安全模块,集成一组800MHz双核锁步ARM Cortex-R5F MCU,支持国密认证SM2/SM3/SM4/SM9
- 支持9个摄像头输入,覆盖360环视、DMS、OMS、DVR
典型解决方案框图
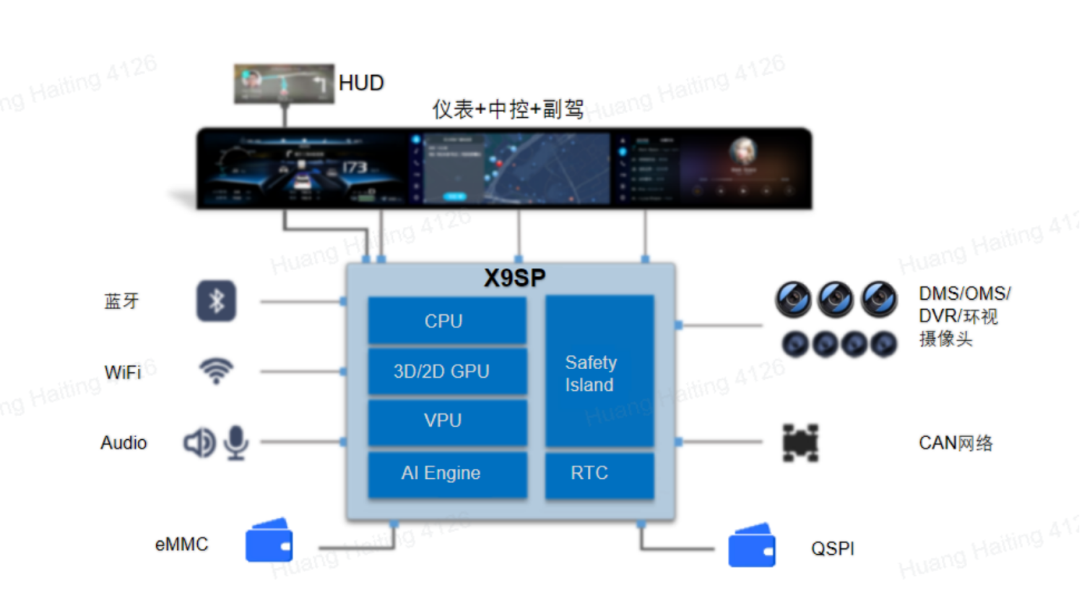
值得一提的是,X9SP在无需使用Hypervisor的情况下,即可支持两个操作系统的独立运行,大大降低了开发难度,提升了系统资源的运行效率。在性能显著提升的同时,X9SP和前一代产品X9HP保持了硬件Pin-To-Pin兼容和软件兼容,一个月即可从X9HP平滑升级至X9SP,仅需9个月左右就可实现车型快速量产,最大程度优化开发成本,并同时大大降低研发投入。
从性能、安全认证等指标来看,芯驰座舱产品已经达到国际一流水平,是国内创新型车芯厂商中座舱芯片量产进度最快的企业之一,拥有几十个重磅定点车型。上汽、奇瑞、长安等车企旗下搭载芯驰智能座舱X9系列芯片的车型已量产上市;同时,芯驰与斑马智行联合发布智能座舱生态化平台,推进舱行泊一体落地。
案例介绍:高通8155处理器
高通骁龙8155是由消费芯片“魔改”而来的芯片,采用1+3+4的8核心设计,其中大核主频为 2.96GHz,三个高性能核心主频为 2.42GHz,四个低功耗小核主频为 1.8GHz。芯片的AI算力可以达到8TOPS,能够实现蓝牙5.0、WI-FI6等连接能力。
高通8155的性能比较强,不过因为基于手机芯片改进而来,其本质是耐用的消费电子芯片,在电路设计之初没有考虑ECC这类汽车芯片需要的功能。如果因为干扰或内部数据传输总线随机的错误,其车内显示屏就无法正常工作或者不完整,表现为显示花屏、闪屏或者黑屏。不过,虽然在某些安全性、耐用性上没有传统汽车芯片那么高,在新势力车企及一些高端车型上,高通8155仍深受青睐。目前,威马W6、WEY摩卡、吉利星越L等车型都搭载了SA8155P芯片。
2.2 智能驾驶
智能驾驶正在逐渐回归理性,不再盲目跟风追求高算力。此前比亚迪董事长王传福提到:“无人驾驶都是扯淡,弄个虚头巴脑的东西,那都是忽悠,它就是一场皇帝的新装。”在他看来,未来的主要方向还是高级辅助驾驶,需要驾驶员扶着方向盘,特殊路况的无人驾驶应用场景目前还很少。ADAS算法、高阶辅助驾驶在资本裹挟下被神化了,市场会慢慢回归理性。
当下,行泊一体域控制器需求正在全面爆发阶段。
案例介绍:德州仪器 TDA4
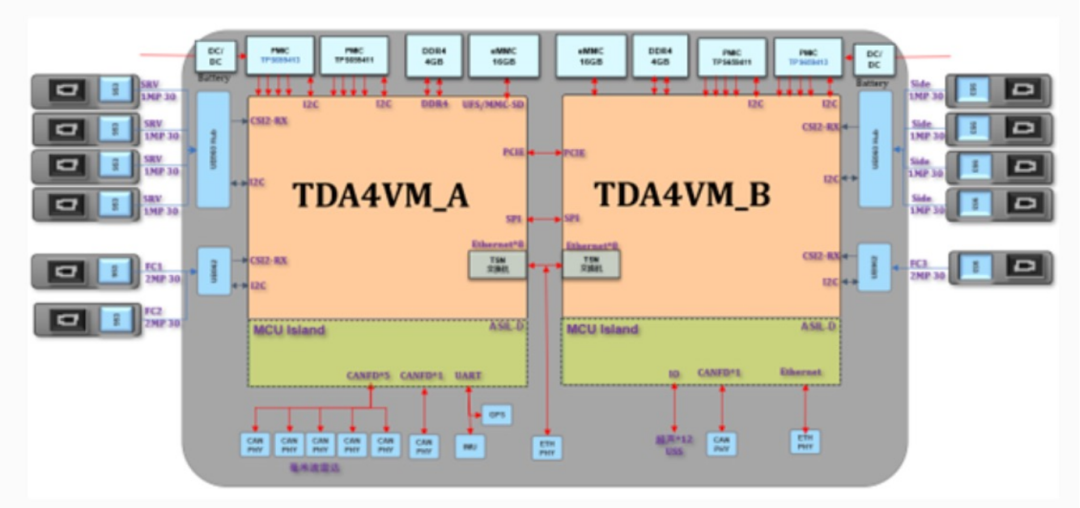
基于 TI 的双 TDA4VM 的 NOA 行泊一体化方案采用了两颗 TDA4VM,单芯片 C7x/MMA 可以实现 8TOPS 算力,总算力 16TOPS 。该方案接入了 11 个摄像头、5 个毫米波雷达 12 个超声波雷达,即 11V5R12USS 行泊一体化解决方案。其系统框图如上图所示,TDA4VM_A 接入了四个全景摄像头和两个前向摄像头。TDA4VM_B 接入了四个侧视摄像头和一个前向摄像头。
行车方面可实现盲区检测 (BSD)、开门预警 (DOW)、车道偏离预警 (LCW)、前向碰撞预警 (FCW)、智能远光灯控制 (IHC)、前方穿行预警 (FCTA)、后方穿行预警 (RCTA)、后方碰撞预警 (RCW)、自适应巡航 (ACC)、车道保持辅助 (LKA)、手动变道 (PLC)、交通拥堵辅助 (TJA)、高速辅助驾驶 (HWA)、自动紧急制动 (AEB)、交互式高速公路自动驾驶 (HWP)、交互式高速公路拥堵自动驾驶 (TJP)、自动辅助导航驾驶 (NOA) 等功能;
泊车方面可实现全景功能 (AVM)、自动泊车辅助 (APA)、遥控泊车辅助 (RPA)、家庭区域记忆泊车 (HAVP) 等功能。
案例介绍:行泊一体智驾芯片芯驰V9P
芯驰推出的L2+单芯片量产解决方案V9P,CPU性能70KDMIPS,GPU达200GFLOPS,整体AI性能20TOPS,在单个芯片上即可实现AEB(自动紧急刹车)、ACC(自适应巡航)、LKA(车道保持)等主流L2+ ADAS的各项功能和辅助泊车、记忆泊车功能,并能集成行车记录仪和高清360环视。V9P内置独立安全岛,无需外置MCU便可实现真正的单芯片行泊一体方案,有效地节约系统成本。
产品特性:
-NPU整体算力达20TOPS,同时支持算力扩展
-8核ARM Cortex-A55 CPU, 70K DMIPS
-Imagination PowerVR 3D GPU, 200GFLOPS
-车规级ISP模块,高达1Gpixel/s图像处理能力,支持800万像素摄像头输入
-高性能VPU,支持H.264/H.265/MJPEG编解码, 4Kp120
-2路MIPI-CSI接口/ 1路Parallel CSI接口/2路MIPI DSI接口
-支持最多9路摄像头输入及2路高清显示
-8路CAN-FD接口/2路千兆以太网/2路PCIe 3.0接口
-内置安全岛,集成800MHz双核锁步ARM Cortex-R5F MCU
典型解决方案框图
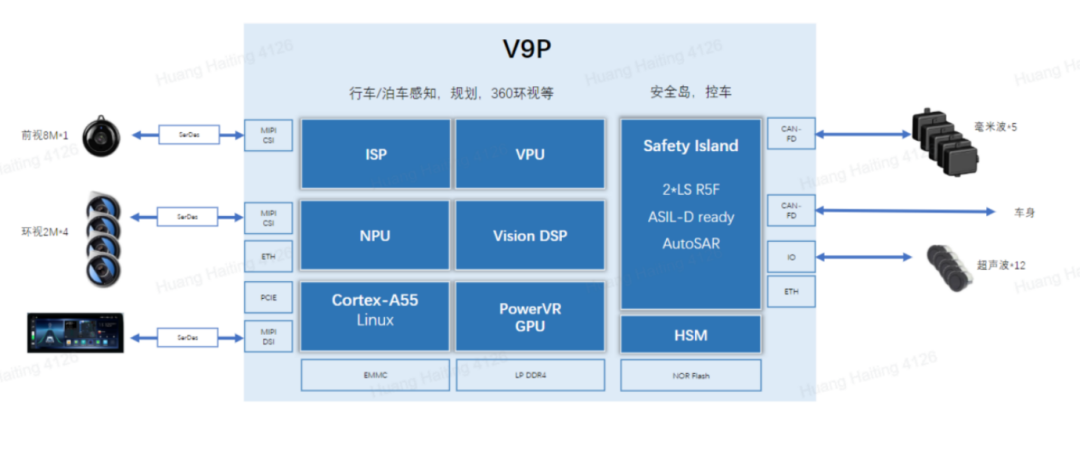
面向量产的APA解决方案(全自动泊车辅助系统)。该方案采用4个鱼眼摄像头和12个超声波雷达实现APA功能,基于CV算法,完成对车位的识别和障碍物检测,结合超声波雷达,适应多种车位和工况。
在L2+及以上高阶智能驾驶领域,天准科技、东软睿驰等Tier 1厂商也在推进国产化的域控制器落地方案。
案例介绍:天准科技TADC系列高阶自动驾驶域控制器
天准推出了基于地平线双征程5+芯驰X9U+芯驰E3平台的TADC-D52高配域控制器方案,面向城市NOA和记忆泊车、自动泊车、360环视等高阶自动驾驶场景;以及基于地平线单征程5+芯驰G9H+芯驰E3平台的TADC-D51中配域控制器方案,面向高速NOA和记忆泊车、自动泊车、360环视等自动驾驶场景。两款产品已于2022年8月实现全部功能的一次性点亮,并于2023年3月份完成全部的DV测试并顺利通过,将在2023年下半年完成PV测试达到量产状态。
案例介绍:东软睿驰自动驾驶域控制器X-Box4.0
东软睿驰自动驾驶域控制器X-Box4.0是基于SDV开发模式下的全新L2+级别域控制器标准品。东软睿驰基于芯驰X9系列以及地平线征程5系列人工智能芯片,实现了中国自动驾驶产业自主化芯片、算法、软件、硬件在研发和量产应用链条方面的全面打通。
全场景芯片布局有助于车厂电子电气架构演进
随着主机厂电子电气架构的不断演进,在集中式域控制器架构的核心主芯片选择上,理想情况下,主机厂更愿意选择同一家车规级SoC芯片厂商,供应链更简单,配合度更紧密,软硬件的适配性更好,可以快速做一些功能的融合设计与开发。从这个角度来说,做核心域控车规芯片全场景布局的厂商在未来将更具有竞争优势。
以芯驰为例,由于在智舱、智驾、网关和MCU控制类芯片均有布局,作为芯片厂商芯驰率先推出了面向未来中央计算的架构SCCA2.0,给主机厂提供底层参考。
高性能中央计算单元:采用高性能X9、V9处理器作为开放式计算核心,并集成G9和E3用于高可靠运算,CPU总算力达到300KDMIPS,作为未来汽车的大脑,实现智能座舱、自动驾驶、整车的车身控制,并提供高速网络交互和存储共享服务等功能,未来芯驰将持续升级,把上述功能逐步集成到一颗芯片上。
高可靠智能车控单元:采用G9处理器和E3 MCU构成的高性能智能车控单元(Vehicle HPC)作为底盘域+动力域的集成控制器,实现底盘和动力的融合以及智能操控。
4个区域控制器:以高性能高可靠的E3多核MCU为核心,实现在车内四个物理区域内的数据交互和各项控制功能。
6个核心单元之间采用10G/1Gbps高性能车载以太网实现互联,并采用冗余架构,既确保了低延迟高流量的数据交换,又能确保安全性。
SCCA2.0是一个足够开放的系统,既可以全套采用芯驰的全场景芯片方案,也能够兼容其他的芯片产品,灵活匹配,全面赋能车企。
中央计算,需要将原本不同的域控制器融合在一起,它不仅仅是堆砌算力那么简单,而是需要在硬件和软件上,渐进式的不断打通和磨合,因此中央计算不会一蹴而就,它需要芯片厂商和车厂、Tier1以落地量产为目标,共同摸索前行。
在传统分布式架构时期,主要由少数几家国际巨头掌握行业话语权,希望在电子电气架构变革的过程中,更多的中国厂商能积极参与,为行业的发展做出更多贡献。
责任编辑:彭菁
-
芯片
+关注
关注
456文章
51075浏览量
425855 -
控制器
+关注
关注
112文章
16427浏览量
178901 -
OEM
+关注
关注
4文章
403浏览量
50419
发布评论请先 登录
相关推荐
分区电子电气架构如何支持软件定义汽车
保时捷Taycan的电子电气架构详解
什么是电子电气架构?汽车电子电气架构面临的挑战
四款汽车电子主机厂电子电气架构对比
主流车企电子电气架构进化对比分析
自动驾驶汽车电子电气架构








 工商网监
工商网监
评论