 全志科技T3A40i核心模块支持实时PREEMPT Linux,助力工业机器人控制!
全志科技T3A40i核心模块支持实时PREEMPT Linux,助力工业机器人控制!
全志科技T3/A40i核心模块支持实时PREEMPTLinux,助力工业机器人控制!
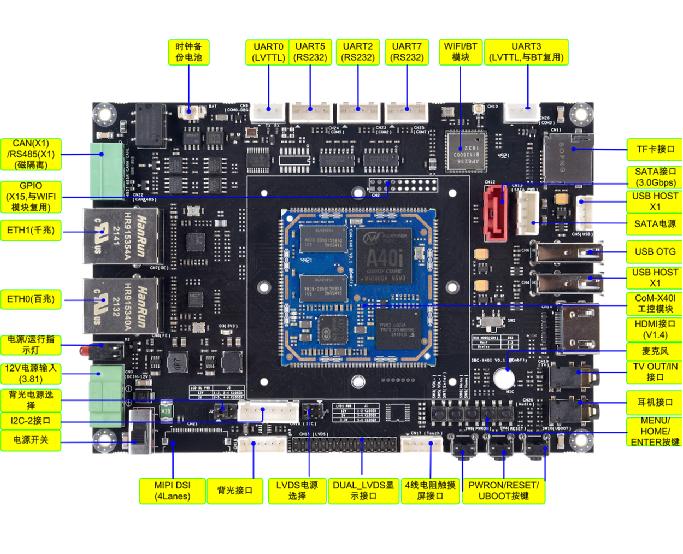
盈鹏飞嵌入式基于全志科技T3/A40i处理器的工控板SBC-X40I,其接口资源丰富,可引出双路网口、单路CANBUS、三路USB、一路RS485等通信接口,板载Bluetooth、WIFI模块,同时引出LVDS LCD、TFT LCD、HDMI OUT、H/P OUT等音视频多媒体接口,支持双屏异显、1080P@45fps H.264视频硬件编码、1080P@60fps H.264视频硬件解码,并支持SATA大容量存储接口。
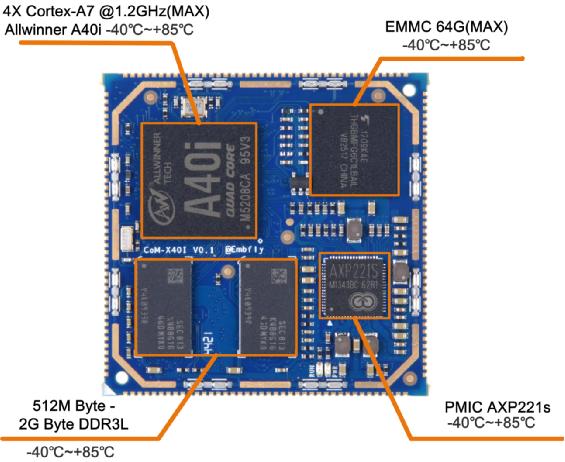
A40i核心板(CoM-X40I)可采用100%国产元器件方案,并经过专业的PCB Layout和高低温测试验证,稳定可靠,可满足各种工业应用环境,应用于能源电力、轨道交通、工业控制、工业网关、仪器仪表、安防监控等典型领域。
Linux-RT内核简介
盈鹏飞嵌入式提供的Linux-RT内核应用了开源的RT PREEMPT机制进行补丁。PREEMPT_RT补丁的关键是最小化不可抢占的内核代码量,同时最小化必须更改的代码量,以便提供这种附加的可抢占性。PREEMPT_RT补丁利用Linux内核的SMP功能来添加这种额外的抢占性,而不需要完整的内核重写。Linux-RT内核增加PREEMPT_RT补丁后,增加了系统响应的确定性和实时性,但是代价是CPU性能降低。
Linux-RT内核与普通Linux内核相比,几个主要的相同之处是:
(1) 具有相同的开发生态系统,包括相同工具链、文件系统和安装方法,以及相同的POSIX API等。
(2) 仍然存在内核空间和用户空间的划分。
(3)Linux应用程序在用户空间中运行。
Linux-RT内核与普通Linux内核在常规编程方式上的几个主要不同之处是:
(1) 调度策略。
(2) 优先级和内存控制。
(3) 基于Linux-RT内核的应用程序使用了调度策略后,系统将根据调度策略对其进行调优。
Linux系统实时性测试
本章节主要介绍使用Cyclictest延迟检测工具测试Linux系统实时性的方法。Cyclictest是rt-tests测试套件下的一个测试工具,也是rt-tests下使用最广泛的测试工具,一般主要用来测试内核的延迟,从而判断内核的实时性。
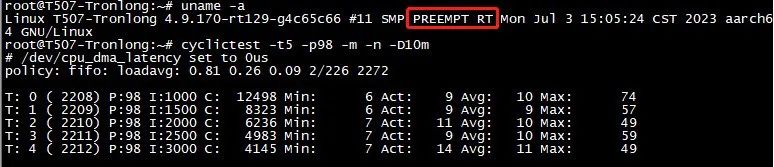
盈鹏飞嵌入式已经提供了Linux-RT内核,可直接烧写到SBC-X40I主板上,终端运行信息如下:

Cyclictest工具简介
Cyclictest常用于实时系统的基准测试,是评估实时系统相对性能的最常用工具之一。Cyclictest反复测量并精确统计线程的实际唤醒时间,以提供有关系统的延迟信息。它可测量由硬件、固件和操作系统引起的实时系统的延迟。
为了测量延迟,Cyclictest运行一个非实时主线程(调度类SCHED_OTHER),该线程以定义的实时优先级(调度类SCHED_FIFO)启动定义数量的测量线程。测量线程周期性地被一个到期的计时器(循环报警)所定义的间隔唤醒,随后计算有效唤醒时间,并通过共享内存将其传递给主线程。主线程统计延迟值并打印最小、最大和平均延迟时间。
参考链接:https://wiki.linuxfoundation.org/realtime/documentation/howto/tools/cyclictest/start?s[]=cyclictest。
编译Cyclictest工具
盈鹏飞嵌入式提供Cyclictes的代码-rt-tests.tar.gz,您可以直接在我们的开发环境下直接编译。
Host#tar -zxf rt-tests.tar.gz
请先确保已参考Linux系统使用手册编译过LinuxSDK,构建A40i处理器对应的GCC编译器。进入解压生成的rt-tests源文件目录执行如下命令,使用LinuxSDK开发包目录下的GCC编译器进行案例编译。编译完成后,将在当前目录下生成可执行文件。
Host#source env.sh
这个编译的环境env.sh如下:

Host#make
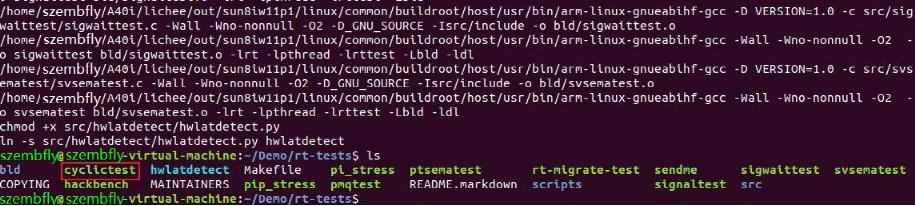
编译完成后,将在当前路径下生成cyclictest可执行文件,将其复制到评估板文件系统。
使用Cyclictest测试系统实时性
本次测试基于Linux-RT-3.10.65内核实时性。
执行如下命令使用Cyclictest程序测试系统实时性。
Target#./cyclictest -a-t-n-p99
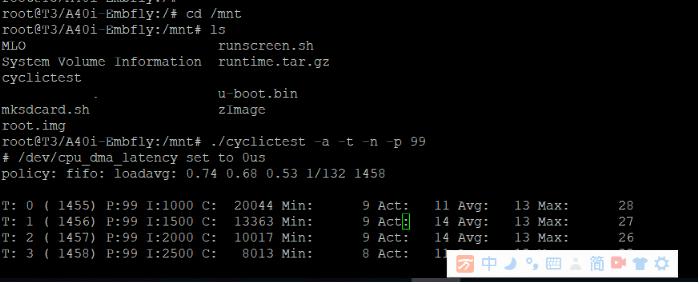 Linux-RT-3.10.65内核测试结果
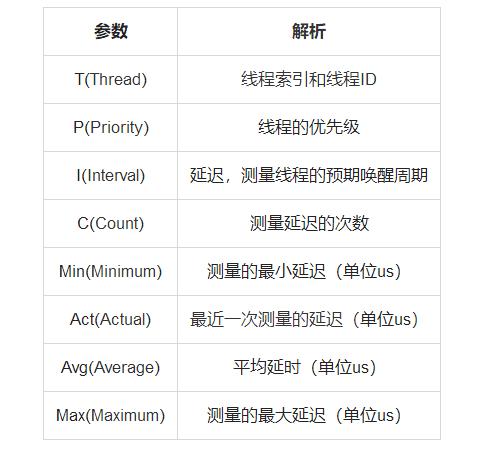
Linux-RT-3.10.65内核测试结果Cyclictest测试结果说明
可看到基于Linux-RT-3.10.65内核的系统的延时更加稳定,最大延时更低,系统实时性更佳。
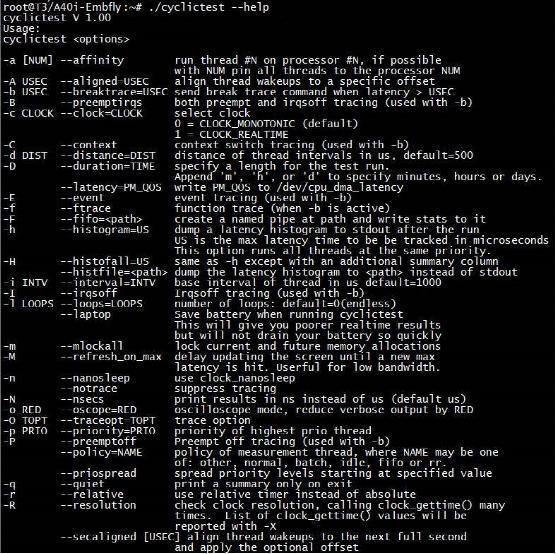
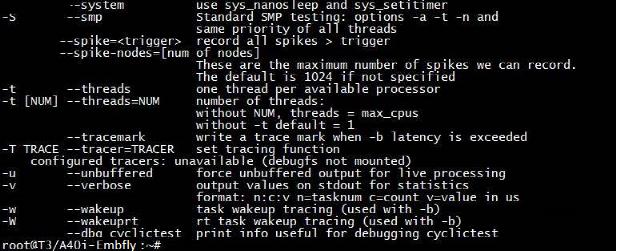
Cyclictest命令参数解析可执行"./cyclictest --help"查看,如下图所示。
-
全志A40i
+关注
关注
0文章
30浏览量
1005
发布评论请先 登录
相关推荐
国产RISC-V基于全志T113-i异构多核平台
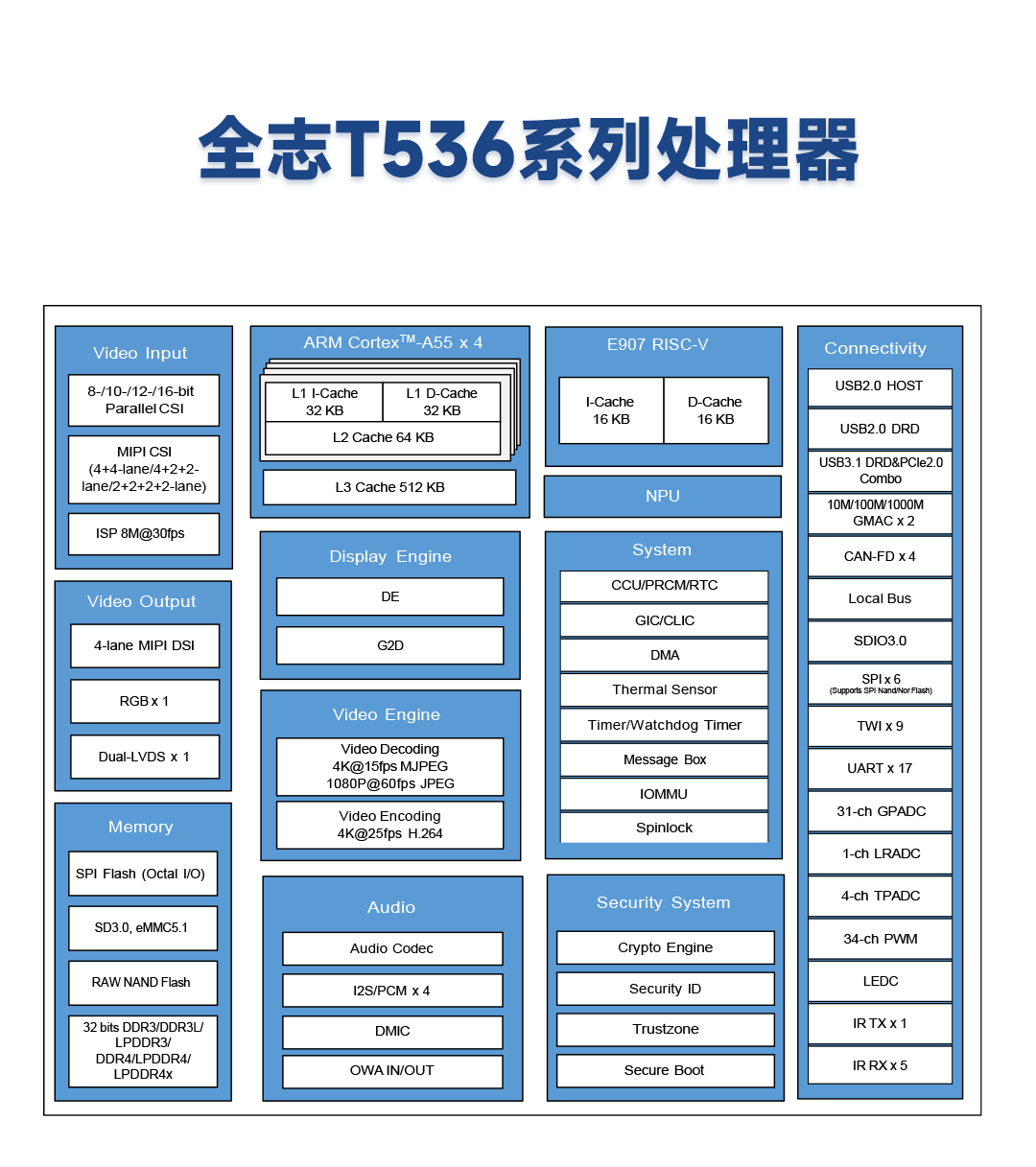
首发!17串口4CAN口、四核A55,米尔发布全志T536核心板

哇!0.8秒启动!Linux快速启动方案分享,全志T113-i国产平台!
基于全志T507-H的Linux-RT + Igh EtherCAT主站案例分享
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
国产芯,米尔基于全志T527的商显主板及工业微型控制器
基于全志T507-H的Linux-RT实时性测试案例分享
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
基于全志T507-H的Linux-RT + Igh EtherCAT主站案例分享





 工商网监
工商网监
评论