 要不要安装360全景导航?
要不要安装360全景导航?

很多人来说,车是属于代步的工具。日常行车中,一些必要的行车装备是必要的,如很多车主都会加装导航、360°全景、行车记录仪等汽车电子产品。对于普通倒车后视,大家很清楚其作用,但是360度全景很多车主未必非常清楚其价值和使用范围。
1、A柱盲区
A柱盲区是指行驶过程中的视野盲区。一般轿车车身每侧有三个立柱,其中前挡风玻璃两侧的斜柱被称为A柱。每当汽车在转弯或者进入弯道前驾驶者的视野都会被A柱部分遮挡,造成一个视野上的盲区。
2、内轮差盲区
拐弯时,前内轮转弯半径与后内轮转弯半径之差,形成盲区。内轮差,在转弯时极易引发交通的原因之一。由于内轮差的存在,车辆转弯时,前、后车轮的运动轨迹不重合。
3、泊车盲区
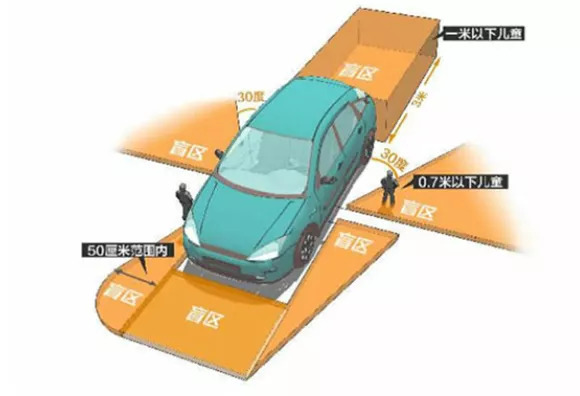
由于车的后方视线也是“先天不足”,车辆在倒车、泊车时,由于两边紧挨着其他车,有的车后窗贴上太阳膜透视性差,座位较高,后视盲区大,在停车或倒车时常常在泊车时造成刮伤、碰撞。因为倒车、泊车造成的事故每年都有很多,造成经济损失是小,更有人因此丧命。
4、后视镜盲区

当转弯角度大时,从后视镜会看不清转弯过去车道上的车辆。如果后面车辆突然消失,可能已经进入盲点。后视镜并不能完全地收集到车身周围的全部信息,因为后视镜的视觉区之间都存在着或多或少的盲区。尤其从辅路上主路,从左后视镜没看到车辆,假如加速大角度切上最内侧车道,是很容易与正在最内侧车道狂飙的车辆发生碰撞。
5、停车录像功能
开车外出时,在路边停车、泊车,不小心被别人刮伤、碰瓷了,怎么办?行车过程遇到碰瓷是忍气吞声,借钱消灾,还是用正义和法律维护自己的合法权利,将碰瓷者绳之以法。可是没有证据什么办?
以上的种种问题,360°全景导航都能帮你解决!
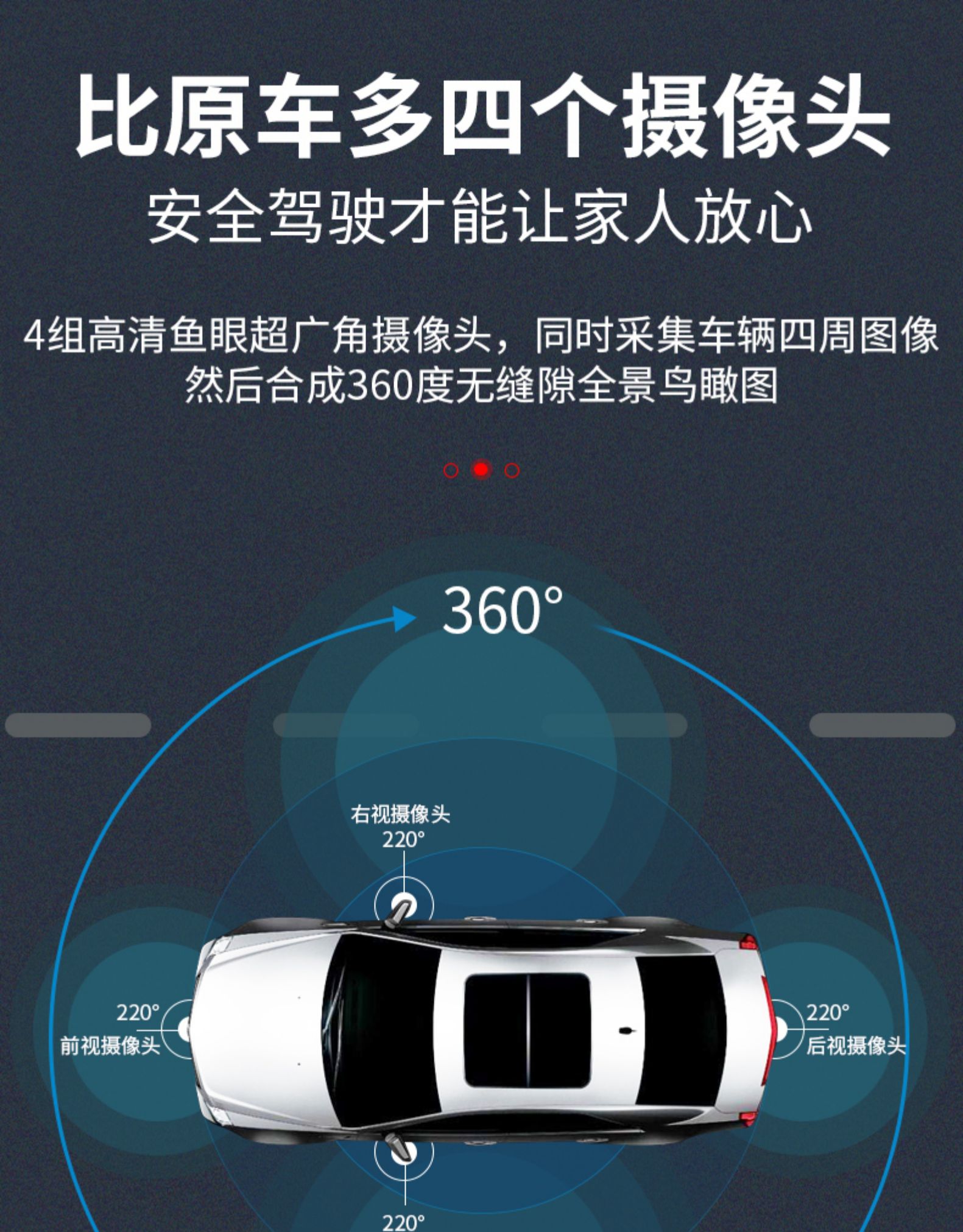
全景导航,通过安装在车身前后左右的4个超广角高清摄像头,同时采集车辆四周的影像,经过图像处理单元矫正和拼接后,形成一幅完整无缝拼接360°全景鸟瞰图,实时传送到中控台的显示设备上。
有了这样的神助攻之后,车主倒车或者行驶在狭小的区域内,除了直觉之外,还可以通过观察导航屏幕的360度全景影像来做出正确的判断,车身周围的所有视野盲区全部可以看见,避免意外的发生。有助于帮助我们行车更加安全。
-
360
+关注
关注
1文章
417浏览量
30934
发布评论请先 登录
自动驾驶要不要跳过L3?华为和小鹏给出了相反的答案

2026年,如何快速找到适合你企业的AI+MES切入点?
探索PSE - 360:紧凑型面板安装霍尔效应旋转传感器的魅力
MonoDream框架赋能机器人仅凭单目相机重构全景与未来

为什么360°镜头容易“踩坑”?

关于DC电路板的GND要不要接金属外壳的问题,以下那个是对的?
12 路 1080P 满负载!米尔 RK3576 补全车载 360° 全景影像视野
中小企业要不要上设备管理系统?3 个问题帮你判断

什么是室内定位导航技术
这一重量级玩家入局,全景相机越来越卷?
HGUIDE O360惯性/GNSS导航仪@霍尼韦尔




评论