 IMU系统简介
IMU系统简介
- IMU原理
惯性测量单元(IMU)通常指由3个加速度计和3个陀螺仪组成的组合单元,加速度计和陀螺仪安装在互相垂直的测量轴上。低精度的IMU可以通过其他方式修正,GPS用于修正位置的长期漂移,气压计用于修正高度,磁力计用于修正姿态。
传感器直接固联在载体上称为捷联惯导系统。
MEMS陀螺仪原理
加速度计原理
MPU6050
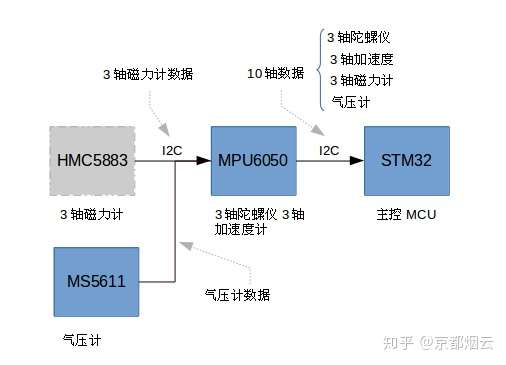
MPU-60x0是全球首例9轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其I2C或SPI接口输出一个9轴的信号(SPI接口仅在MPU-6000可用)。MPU-60x0也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器。

MPU-60x0对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。一个片上1024字节的FIFO,有助于降低系统功耗。和所有设备寄存器之间的通信采用400kHz的I2C接口或1MHz 的SPI接口(SPI仅MPU-6000可用)。对于需要高速传输的应用,对寄存器的读取和中断可用20MHz的SPI。另外,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器。
在crazepony上,MPU6050/HMC5883/MS5611传感器之间的连接如下图所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
IMU
+关注
关注
6文章
312浏览量
45764
发布评论请先 登录
相关推荐
探索未知,IMU助力精准导航
随着科技的持续进步,高性能MEMS IMU成为导航技术领域的关键组件。其中,ER-MIMU-02Mini能实时提供物体的加速度与角速度数据,这些数据通过计算可获得载体的姿态、速度、位移等信息,满足多种高精度测量需求。
高精度IMU助力石油矿业精准作业
在石油、矿业等行业中,技术革新是推动发展的关键。IMU作为核心传感器技术,能够实时测量物体的角速度和加速度,提供关键的数据支持。为此,我们专为石油矿业推出了一款IMU ER-MIMU-09,旨在助力测井、采矿等作业实现更高的精度和效率。

EPSON新品IMU传感器M-G570PR投产,功能更强大!
精工爱普生公司(以下简称“爱普生”)已经开发并于近期批量生产具备高性能六轴传感器的惯性测量单元①(“IMU”)的新优质产品。新型号为M-G570PR,相比较旧型号M-G370PDG,它具有高精度

如何在psoc creator 4.4中使用cypress kitprog从imu 9250/6500读取数据?
我想在 psoc creator 4.4 中使用 cypress kitprog 从 imu 9250/6500 读取数据。 引导我建立联系和编码。
发表于 07-03 06:50
IMU中的misaligment误差是如何区分Axis to axis与Axis to frame误差的?
大家好,想咨询一下,IMU中的misaligment误差是如何区分Axis to axis与Axis to frame误差的?
您好,我想询问一下IMU中的错位误差如何区分轴到轴和轴到帧误差?
发表于 05-29 07:51
M-G552PC7 IMU(惯性测量单元)CAN接口
一般说明M-G552PC7是一个小形状因子惯性测量单元(IMU),具有6个自由度:三轴角率和线性加速度,并使用高精度补偿技术提供高稳定性 和高精度的测量能力。 各种校准参数存储在IMU的内存中,并在
发表于 04-28 11:22
•0次下载
惯性测量单元(IMU)CAN接口:M-G552PJ7
M-G552PJ7是一种小形状因子惯性测量单元(IMU),具有6个自由度:三轴角率和线性加速度,利用高精度补偿技术提供高稳定性和 高精度的测量能力。 各种校准参数存储在IMU的内存中,并在IMU
发表于 04-26 15:35
•0次下载
【核芯观察】IMU惯性传感器上下游产业梳理(二)
前言:【核芯观察】是电子发烧友编辑部出品的深度系列专栏,目的是用最直观的方式令读者尽快理解电子产业架构,理清上、中、下游的各个环节,同时迅速了解各大细分环节中的行业现状。本期【核芯观察】,将对IMU
【核芯观察】IMU惯性传感器上下游产业梳理(一)
前言:【核芯观察】是电子发烧友编辑部出品的深度系列专栏,目的是用最直观的方式令读者尽快理解电子产业架构,理清上、中、下游的各个环节,同时迅速了解各大细分环节中的行业现状。本期【核芯观察】,将对IMU
爱普生(EPSON)开发新IMU产品M-G370PDS改善姿态和震动控制
相应地,对提供更高精度的IMU的需求正在上升,这对于姿态控制和噪声性能至关重要。爱普生正是再这种对于高精度IMU的需求之下,开发新IMU产品M-G370PDS改善姿态和震动控制,来填补IMU
爱普生为姿态和振动控制开发理想的IMU
单元(IMU)1。新产品计划于2022年春季批量生产。爱普生的imu于2011年首次推出,已在一系列客户应用中使用,以出色的性能和质量赢得了良好的声誉。近年来,I
RA生态系统合作伙伴解决方案提供卓越的平面航向和6轴IMU性能
电子发烧友网站提供《RA生态系统合作伙伴解决方案提供卓越的平面航向和6轴IMU性能.pdf》资料免费下载
发表于 02-19 09:46
•0次下载

M-G370PDF1(IMU)
一般描述 M-G370PDF1是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角速率和线性加速度,并提供了高稳定性和高精度的测量能力与使用高精度补偿技术。各种校准参数被存储在IMU
发表于 01-11 17:00
•0次下载
M-G370PDS惯性测量单元(IMU)
M-G370PDS0是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角率和线性加速度,并提供高稳定性和高精度的测量能力精密补偿技术。各种校准参数被存储在IMU的存储器中,并且是在
发表于 01-11 09:55
•1次下载





 工商网监
工商网监
评论