 PNI惯性传感器(IMU)10轴模块
PNI惯性传感器(IMU)10轴模块
PNI的运动姿态测量模块以小巧、低功耗、易于集成的包装,提供精确的航向角以及定位数据.
M&M 模块是一系列小型不同形式的组合板卡,它集成了PNI的超低功耗 Sentral-A2 运劢协处理器和嵌入式传感器融合算法以及运劢传感器。M&M 模块允许开发人员丏注于创建创新的终端应用程序,而不是传感器融合算法。铁自劢校准减少了磁失真,幵确保了随时间变化的准确性;与其他需要广泛的传感器融合算法开发和传感器校准工作的惯性测量单元(IMUs)不同,M&M 模块是预先设计的,以提供高精度的运劢跟踪、航向和环境数据,它占用通用微处理器使用的功耗的很小一部分。
M&M Amber 10 轴模块包括:SENtral-A2、RM3100 磁性 传 感 器 、 ST LSM6DSL 加 速 度 计 / 陀 螺 仪 以 及 STLPS22H 压力传感器(零件号:14047)。
 PNI10轴 IMU
PNI10轴 IMU
特点和好处
低功耗提供了管理功耗和运劢跟踪性能之间的权衡;
消费电子应用中无与伦比的航向精度;
连续的硬铁和软铁自劢校准减少了磁失真,
磁异常补偿,因此头部和运劢跟踪不受瞬态磁异常的影响.
技术规格
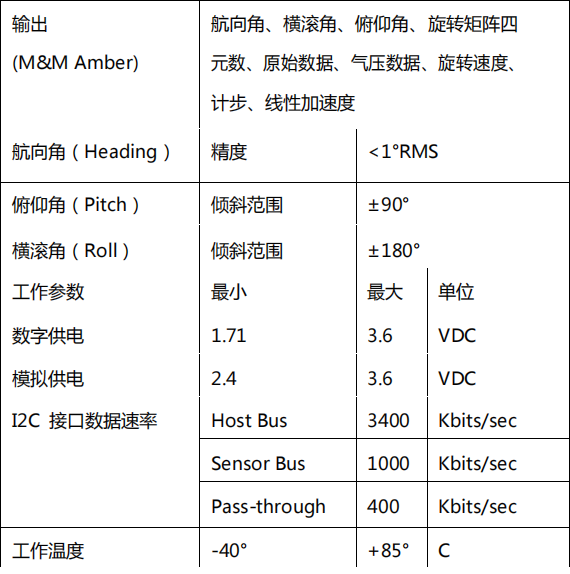 PNI 10轴运动姿态模块技术参数
PNI 10轴运动姿态模块技术参数
PNI拥有超过 30 年行业经验,是世界领先的精确定位劢作捕捉和真实应用中的传感器融合算法丏家。PNI的传感器和算法是实现物联网项目
和其他关键任务应用的基石,其中精确定位、精度和低功耗非常关键。
基于几十年的丏利传感器和算法开发,PNI提供了业界最高性能的地磁传感器、位置和运劢协处理器、高性能模块、传感器融合算法和完整的传感器系统。
惯性传感器应用
惯性传感器能够为车辆中的所有控制单元提供车辆的即时运动状态。路线偏移,纵向横向的摆动角速度,以及纵向、横向和垂直加速度等信号被准确采集,并通过标准接口传输至数据总线。所获得的信号用于复杂的调节算法,以增强乘用车和商用车(例如,ESC/ESP、ADAS、AD)以及摩托车(优化的曲线 ABS)、工业车辆和农用车的舒适性与安全应用,如下图示。

在无人车方面的应用多与GPS或者GNSS组合使用,如下图示:
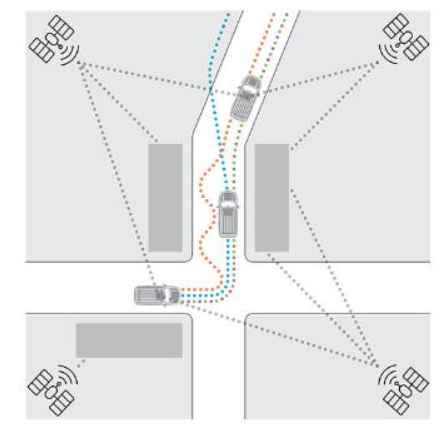
虽然全球导航卫星系统和GPS接收机计算相对于卫星你的位置,惯性导航让你的速度、态度和任何升沉运动测量。结合使用时,这两种导航技术会彼此增强。惯性测量单元(IMU)允许GNSS接收器在卫星信号中断时保持位置不变。相反,GNSS的绝对位置和速度精度有助于补偿潜在的IMU错误,例如位置漂移。
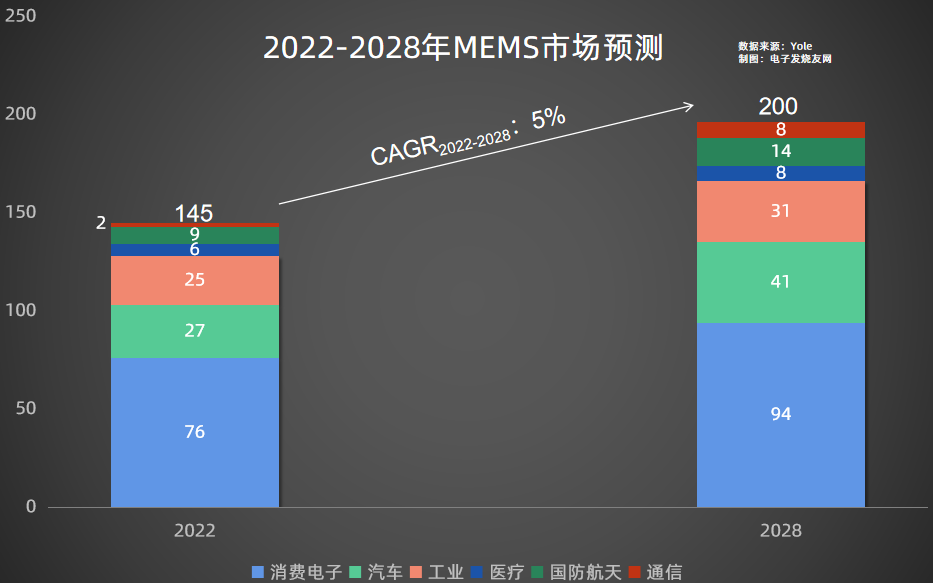
MEMS惯性传感器的发展
未来MEMS惯性传感器的发展主要有四个方向:
1、高精度
导航、自动驾驶和个人穿戴设备等对惯性传感器的精度需求逐渐提高,精细化测量需求和智能化的发展也对传感器的精度提出了越来越高的要求。
2、微型化
器件的微型化可以实现设备便携性,满足分布式应用要求。微型化是未来智能传感设备的发展趋势,是实现万物互联的基础。
3、高集成度
无论是惯性测量单元还是惯性微系统都是为了提高器件的集成度,进而实现在更小的体积内具备更多的测量功能,满足装备小体积、低功耗、多功能的需求。
4、适应性强
随着MEMS惯性传感器的应用范围越来越广泛,工作环境也会越来越复杂,例如:高温、高压、大惯量和高冲击等,适应复杂环境能够进一步拓宽MEMS惯性传感器的应用范围。
-
IMU
+关注
关注
6文章
312浏览量
45764
发布评论请先 登录
相关推荐
ST携手PNI打入任天堂Wii U内部


爱普生(EPSON) 惯性测量单元(IMU)、陀螺仪传感器等模块应用领域选型介绍

EPSON新品IMU传感器M-G570PR投产,功能更强大!

CY8C5888LTI-LP097读取psoc creator 4.4中的bmx160 imu 9轴传感器模块,对电路板进行编程后putty什么也没显示,为什么?
6轴传感器的工作原理及应用领域

意法半导体推出高性能ISM330BX 6轴惯性测量单元
意法半导体推出全新6轴IMU,赋能工业与机器人监测跟踪
意法半导体推出一款LSM6DSV32X 6轴惯性模块(IMU)
【核芯观察】IMU惯性传感器上下游产业梳理(二)





 工商网监
工商网监
评论