 虹科案例|VisualSim应用案例分享
虹科案例|VisualSim应用案例分享

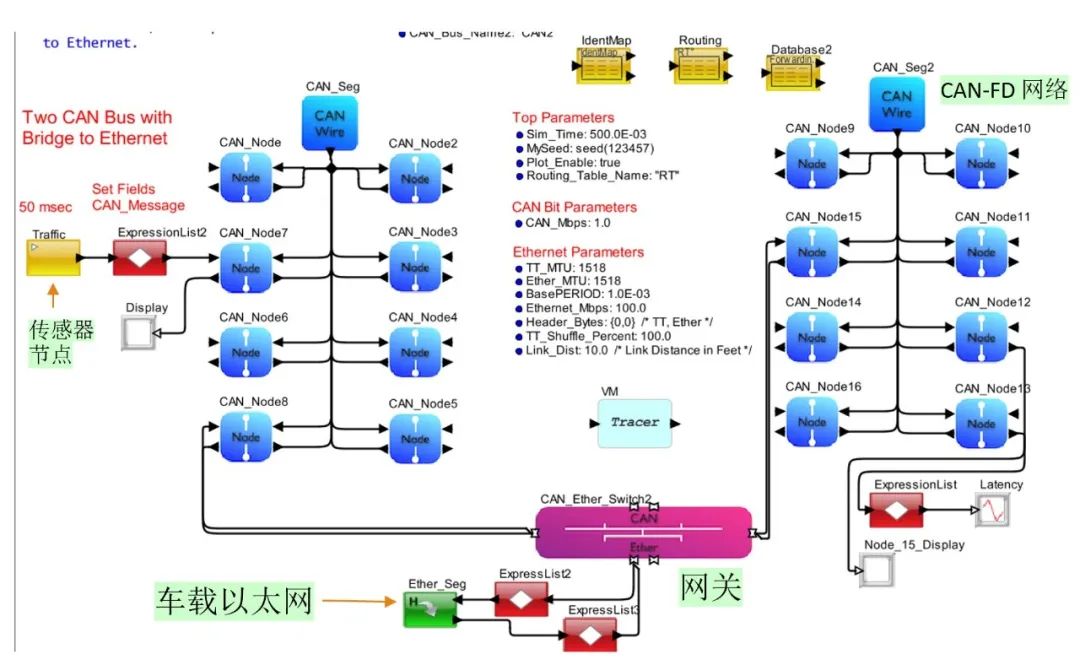
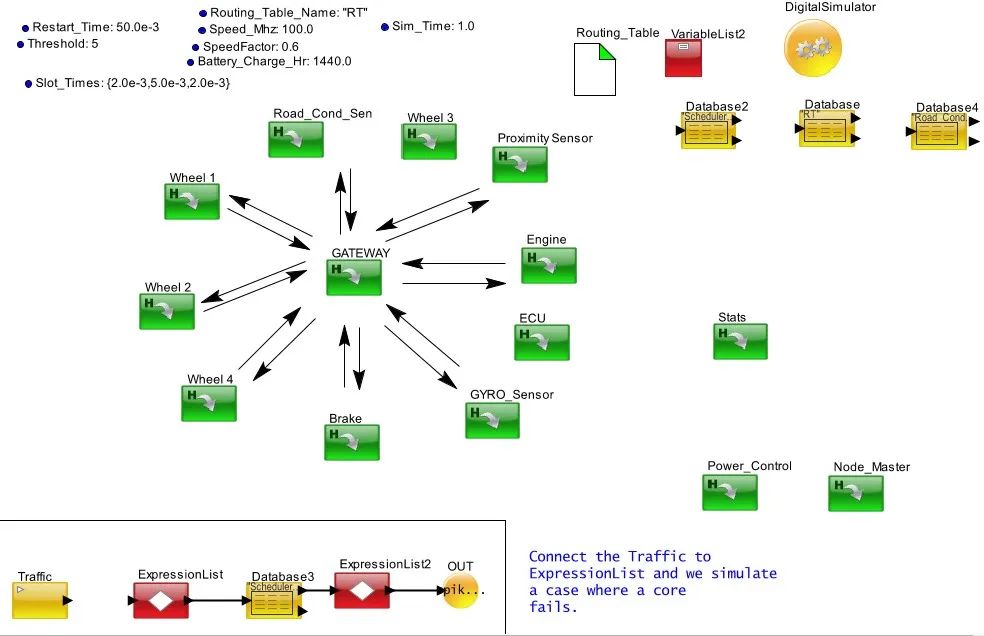
动态网关GW的性能分析

性能瓶颈:分析排队、调度、QoS和带宽限制,评估合成网络流量、现有车辆和AUTOSAR的跟踪文件。
优化网关软件:探索不同的架构和实施策略,验证目标CPU和内存资源的性能。
以太网ASIC和网关硬件:使用不同供应商的功能芯片进行实验,在单核和多核CPU上探索不同的架构策略,运行目标软件进行早期验证。

2

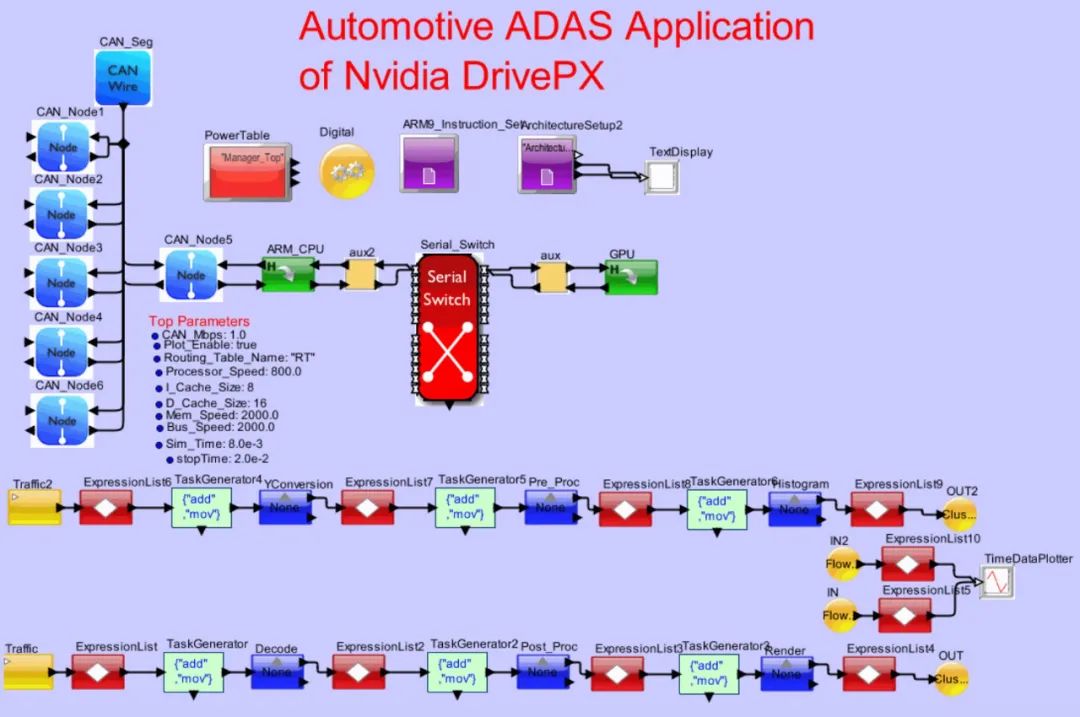
这是在NVidia的Drive-PX平台上运行的自动驾驶应用程序的框架设计案例。它有两种类型的配置:6个雷达每40毫秒发送最多15个目标;一个前置摄像头每40毫秒发送最多15个目标。所有这些数据都来自CAN (FD)总线。多达6个摄像头,一个800万像素,另一个150万像素将原始数据传送到Drive-PX。
此外,4个雷达具有多达15个目标,周期时间为40毫秒。这个模型评估不同的软件架构。我们需要根据任务在处理器之间的分布来度量内存使用、处理器使用、延迟和处理器上的吞吐量以及通信链接。当然,错误的影响将使我们了解给定架构的健壮性。
3
摄像头多核处理器系统的吞吐量分析
图像处理系统的挑战来自时间、功率和服务质量,其中:1.处理多主机总线冲突;2.DRAM访问的延时包含:3.图像处理的吞吐量,确定GPU处理核心的资源效率和消耗功率。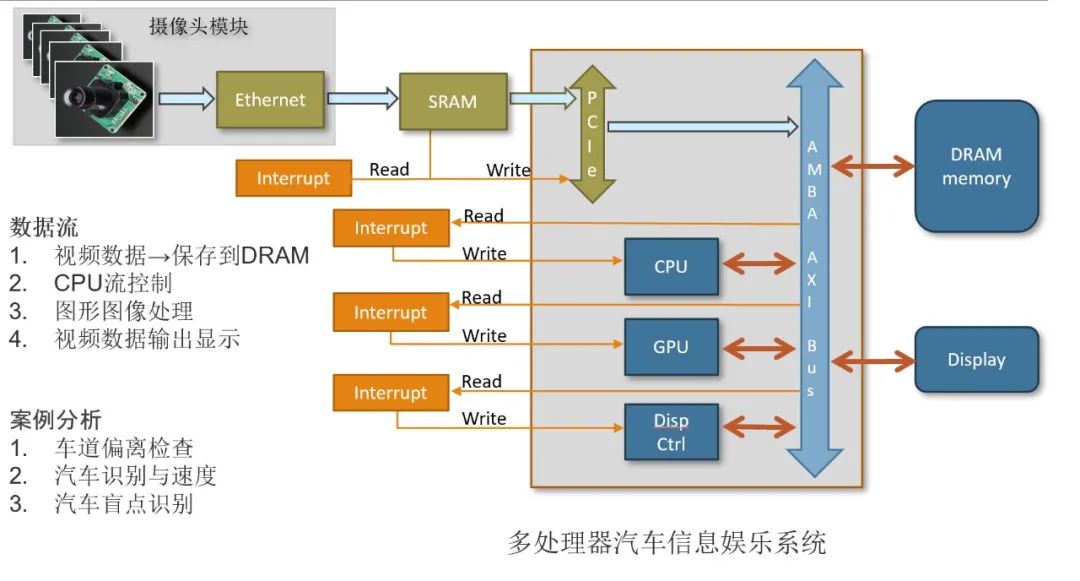
4
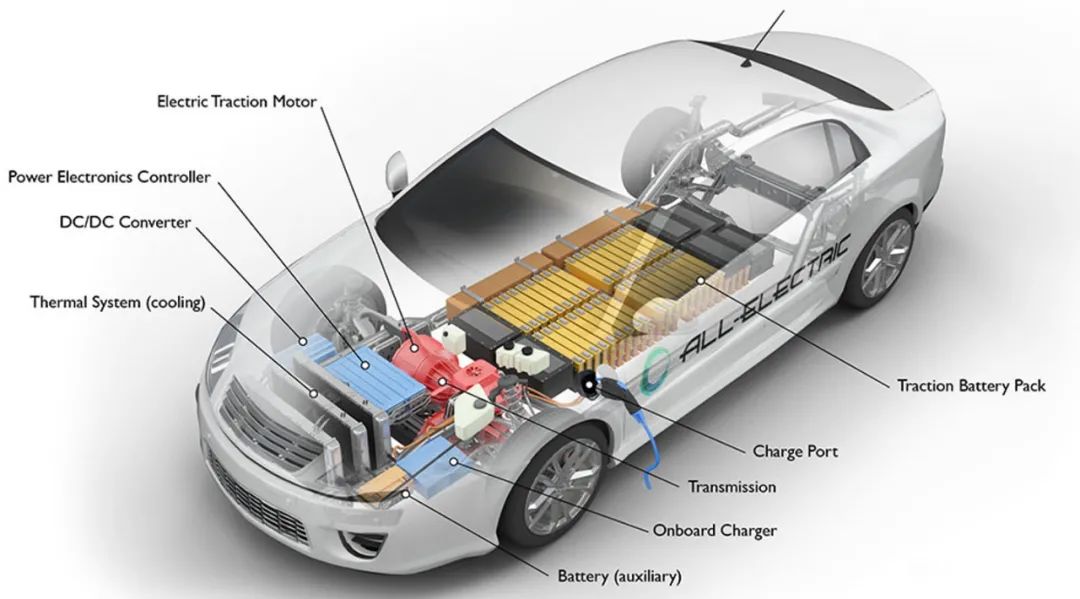
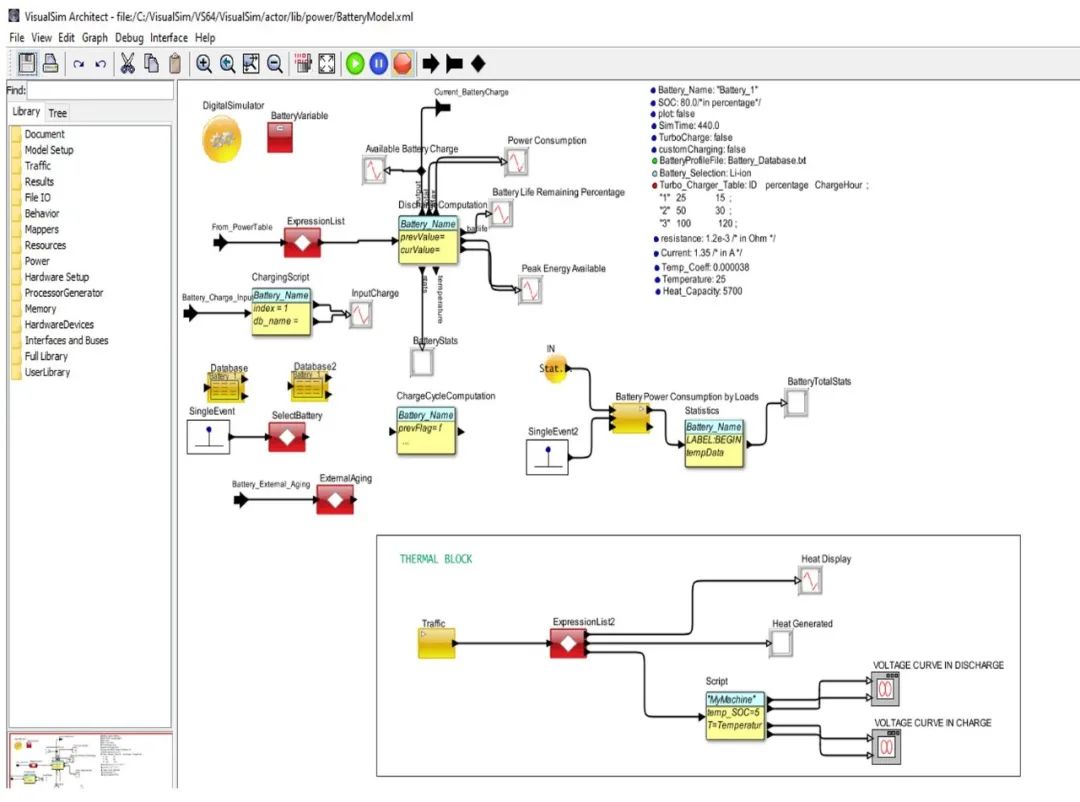
混合动力/电动汽车电池系统架构设计
电动汽车架构设计需求主要包括:电池的大小
电池的生命周期
-
尖峰和冲击的影响
-
最大充电/放电
响应时间
-
充电/放电率
-
功能正确性
负载响应
对不同数量的系统负载
功能安全鉴定
5
功能安全的模式分析
使用VisualSim建模确定功能安全中最合适的操作模式。其中分离模式,作为双CPU配置运行(又称性能模式)。每个TCM是64KB;另外一种锁步模式,作为冗余CPU配置运行(又称安全模式)。其中TCM可以合并为256 KB(ATCM和BTCM各128 KB)。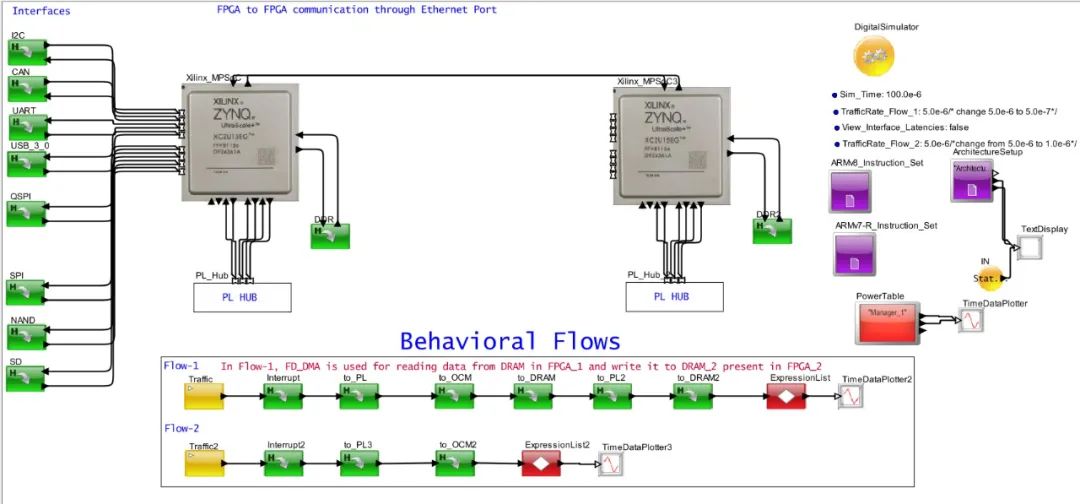
6
AUTOSAR模型与任务优化
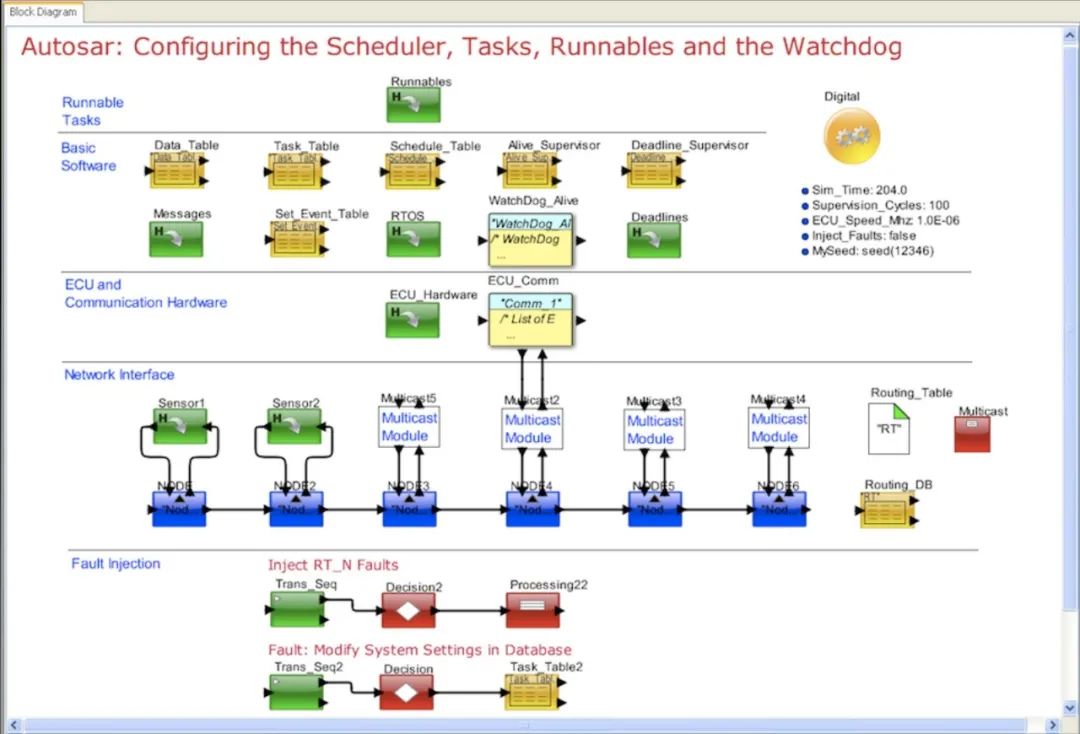
使用VisualSim构建Autosar模型,并进行调度表、任务、Runnables和Watchdog的配置和分析优化。
- WatchDog Manager可以用VisualSim平台进行建模。
- 可以处理WDM Alive Indications,Deadline。
- 可以添加RT_n的多核执行。
- 包括RT_n、事件和数据的可运行任务预设条件。
- 跟踪可运行任务、故障的逻辑流程。
- 注入数据结构故障或在特定时间修改设置表。
- 可以添加.xml配置文件的转换。
7
汽车制动系统的SOTIF影响分析
SOTIF的目标是减少潜在的未知、不安全条件。为了避免潜在的安全隐患,人工智能需要做出决策。这包括需要态势感知的场景。
通过VisualSim进行感觉场景的搭建与仿真分析,实现ISO 21448考虑到情况,根据可能性做出决定。
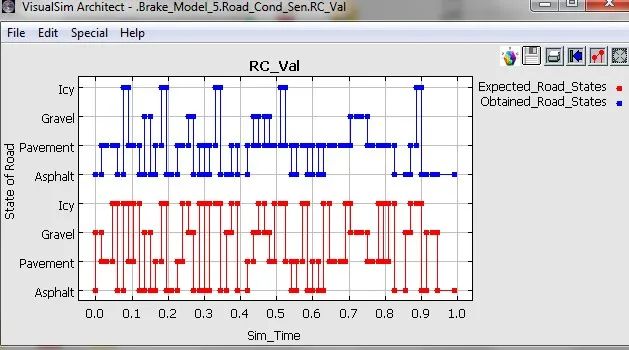
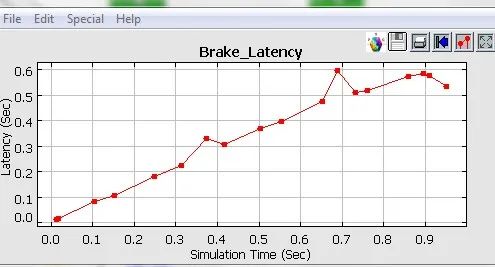
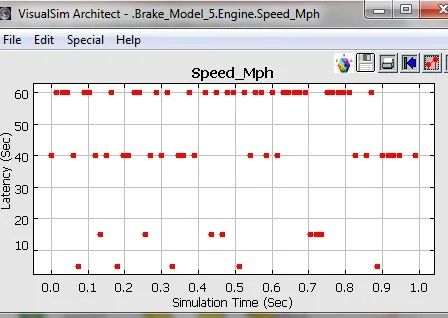
不同路面试验,得出不同工况下的试验结果并进行了响应延迟分析。
-
网关
+关注
关注
9文章
7043浏览量
56665 -
虹科电子
+关注
关注
0文章
788浏览量
15392
发布评论请先 登录
虹科动态 | 2026年4月精彩回顾

虹科动态 | 华工MBA校友一行走进虹科,对话多领域技术底座
再获国际权威认可!虹科方案荣登CiA官方期刊
虹科动态 | 2026年1月精彩回顾
虹科动态 | KOTRA广州韩国贸易馆 韩国商工会领导来访虹科总部
虹科动态 | 2025年12月精彩回顾

虹科答疑 | 使用虹科PCAN-Explorer 6进行.DBC解析总共分几步?
虹科动态 | 2025年11月精彩回顾
虹科动态 | 虹科×长城汽车技术交流日圆满落幕!
虹科案例 | 矿业数字化转型:虹科owa5X如何赢得日立Wenco信任?
虹科动态 | 2025年10月精彩回顾
虹科动态 | 2025年9月精彩回顾
虹科动态 | 2025年8月精彩回顾
虹科分享 | 赋能现代化矿业:虹科Owasys坚固型车载通信终端方案



评论