 第四章 独立按键与LED
第四章 独立按键与LED
第一节 硬件解读
既然大家都学到物联网了,想必这些基础一定很熟悉,关于按键的消抖等基本知识就不再重复,直接看原理图。LED的原理图,上一章也已经讲解了,本章将重点是独立按键。以下是独立按键的原理图:
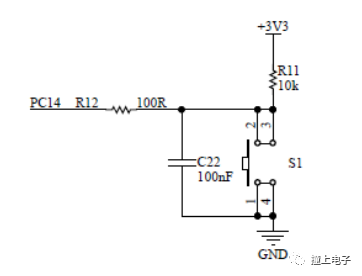
从上图可以看出,该按键连接的引脚是PC14,只要按键被按下,PC14变为低电平,反过来也是,只要该引脚为低电平,即可证明该按键被按下。
第二节 配置环境
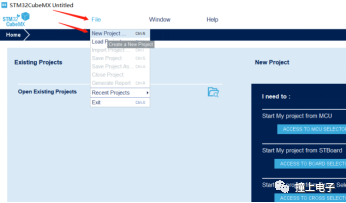
1,打开stm32cubeMX。
2,选择“File-New project ...”。
3,搜索芯片,芯片型号为:STM32L071KB(大小写都可以)。并选择芯片封装为UFQFPN32的芯片。
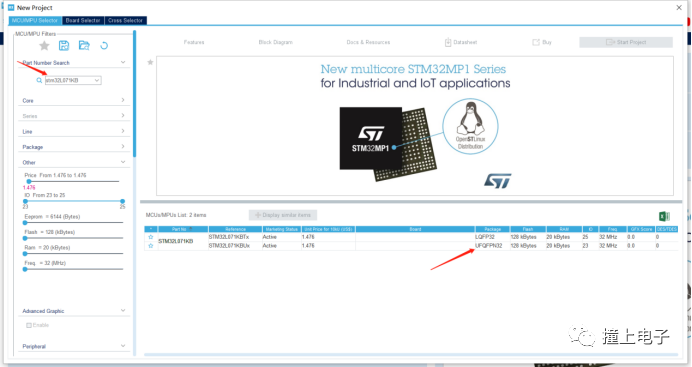
4,选择A->Z,这里可以看见该芯片的所有的功能。

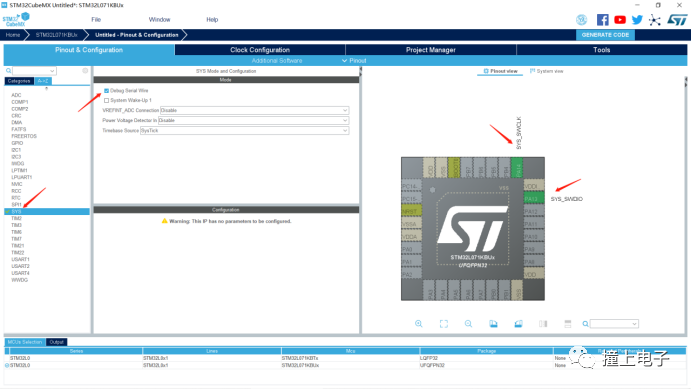
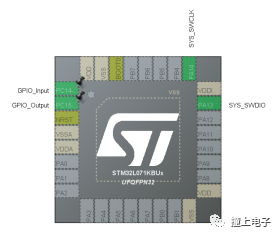
5,选中“SYS”,勾选“Debug Serial Wire”,可以看见PA13与PA14引脚变成绿色,分别用作SYS_SWDIO和SYS_SWCLK。
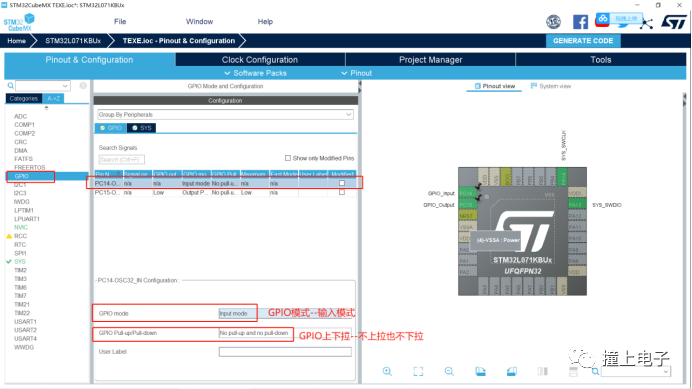
6,将PC14和PC15用作输入和输出。如下图配置:
7,上一章详细解释了GPIO的输出模式(LED为例)的初始化信息,下面来看看GPIO的输入的配置(以为按键输入为例)。
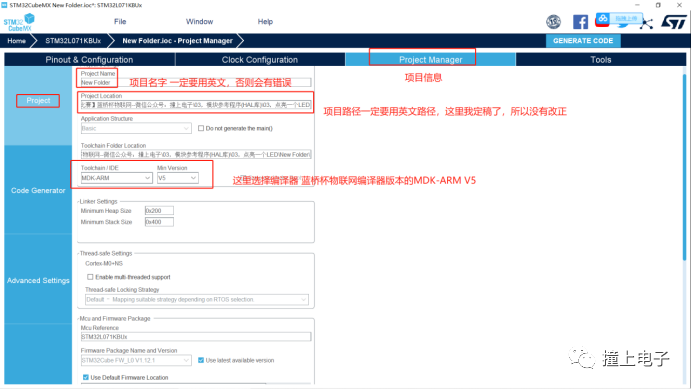
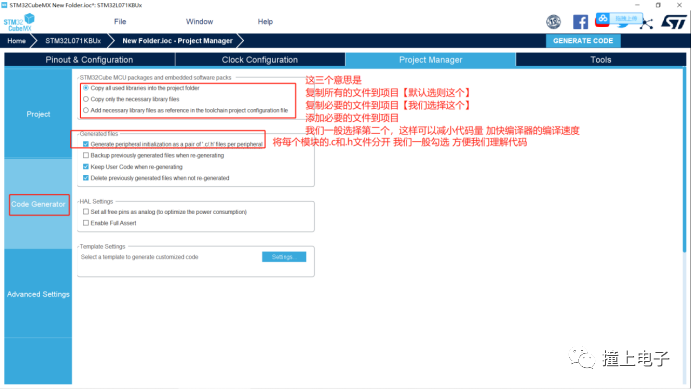
8,选中“Project Manager-Project”。在Project Name中填写项目的名字(尽可能不要用中文),在Project Location中选择项目保存的路径(尽可能不要用中文),在Toolchain/IDE中选择编译器,蓝桥杯物联网比赛用的是MDK5,所以我们选择MDK-ARM V5。对于项目信息的操作,大家注意看下面2张图。
9,点击GENERATE CODE,生成代码。
10,点击“close”,代码生成成功。
第三节 编写代码
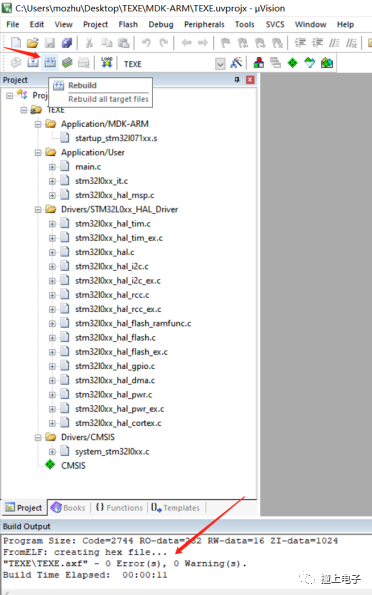
1,根据stm32cubeMX生成代码的目录,打开MDK5。
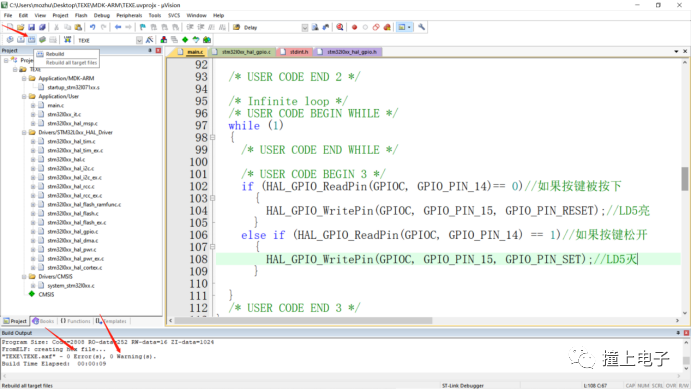
2,点击”Rebuild”,开始编译代码,检查stm32cubeMX生成的代码是否有问题。如下图,0错误,0警告。
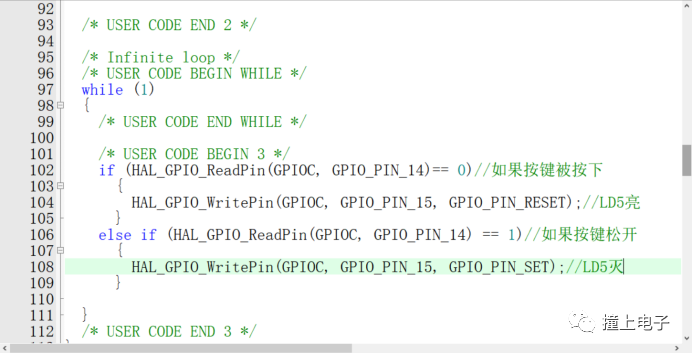
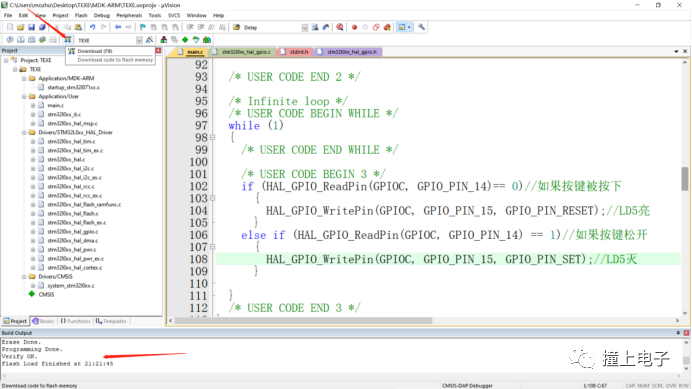
3,在while中添加以下语句,注意,需要在BEGIN与END之间添加。
4,点击”Rebuild”,开始编译代码,检查stm32cubeMX生成的代码是否有问题。如下图,0错误,0警告。
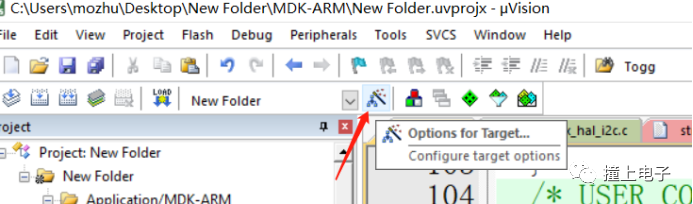
5,点击”Options for Target...“。
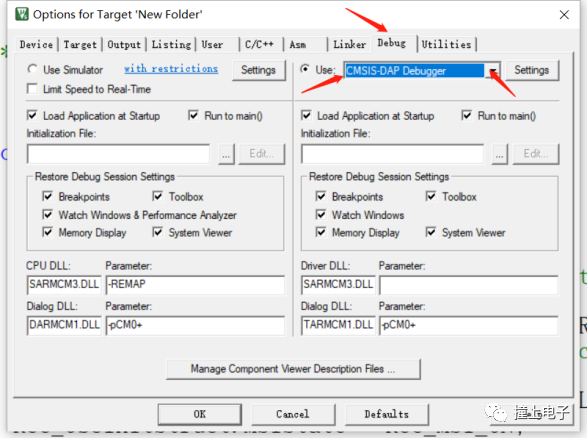
6,点击”Debuy“,然后选择下载器”CMSIS-DAP Debugger“,并点击”OK“。
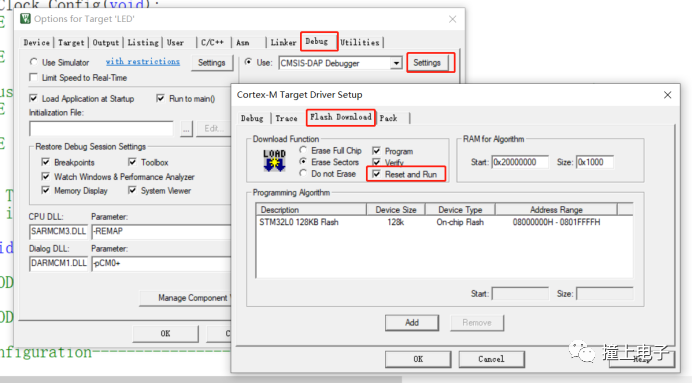
7,选择“Debug”--“Settings”--“Flash Download”--“Reset and Run”。这样开发板每次上电都自己先复位一次,再跑程序。
8,点击”Download“,开始下载程序并下载成功。
第四节 实验现象
实验注意事项:
1,程序语句需要位于程序的BEGIN与END之间。
3,CN4所有拨码开关必须选择ON DP档,否则无法下载程序。
实验现象:
LD1,LD4常亮。按下按键,LD5亮;松开按键,LD5灭。
宗旨:
免费的服务,永远的开源
说明:
1.本教程免费,开源,禁止用于任何商业用途,违者必究。
2.本教程版权所属为东莞市东城墨竹公子电子工作室,盗版必究。
-
led
+关注
关注
242文章
23409浏览量
664165
发布评论请先 登录
相关推荐
华为-射频基础知识培训
《DNESP32S3使用指南-IDF版_V1.6》第四章 认识ESP-IDF
《DNK210使用指南 -CanMV版 V1.0》第十四章 按键输入实验
【「嵌入式Hypervisor:架构、原理与应用」阅读体验】+第三四章阅读报告
【北京迅为】iTOP-i.MX6开发板使用手册第四部分固件编译第十四章非设备树Android4.4系统编译
第四章:对广东龙芯2K0300-蜂鸟板-v1.0视频教程我的感触
【「ARM MCU嵌入式开发 | 基于国产GD32F10x芯片」阅读体验】+书籍整体概况
第四章:在 PC 交叉编译 aarch64 的 tensorflow 开发环境并测试
第四章-V1.5 舵机 舵机角度控制 PWM控制红外对管和按键控制 STM32驱动舵机控制 SG90控制

双麒麟系统!迅为RK3588开发板+银河麒麟/开放麒麟
【紫光同创盘古PGX-Nano教程】——(盘古PGX-Nano开发板/PG2L50H_MBG324第四章)静态数码管显示实验例程
搭配100教学实验案例,轻松解决老师备课难题!






 工商网监
工商网监
评论