 运动控制卡应用开发教程之硬件比较输出
运动控制卡应用开发教程之硬件比较输出
今天,正运动小助手为大家分享一下应用C++开发一个硬件比较输出例程。
我们主要从新建MFC项目,添加函数库讲起,再了解PC函数用,最后通过项目实战——硬件比较输出例程讲解,来让大家熟悉运动控制卡的PC开发。
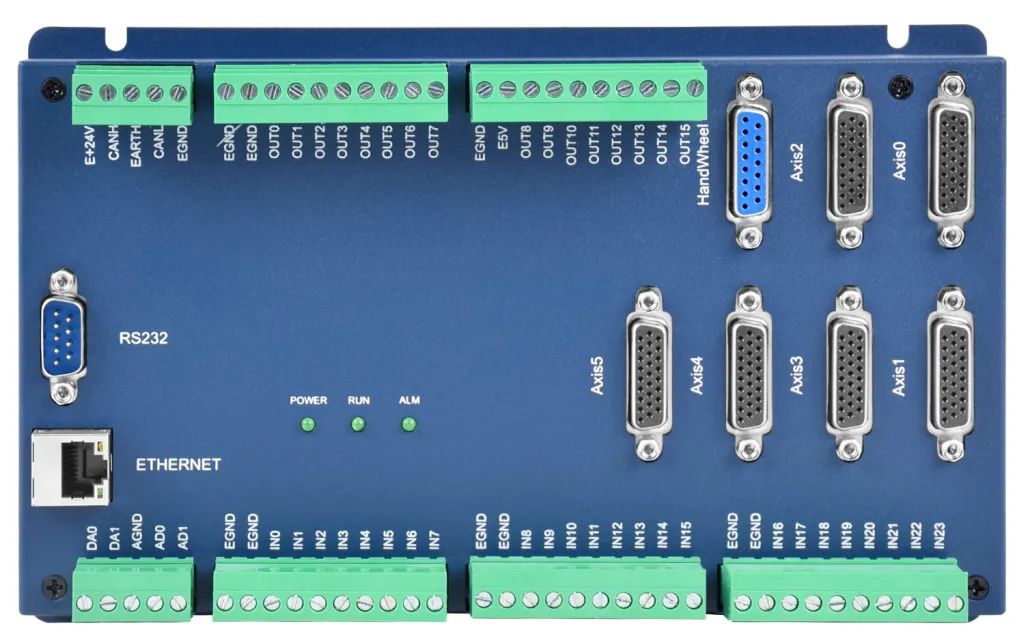
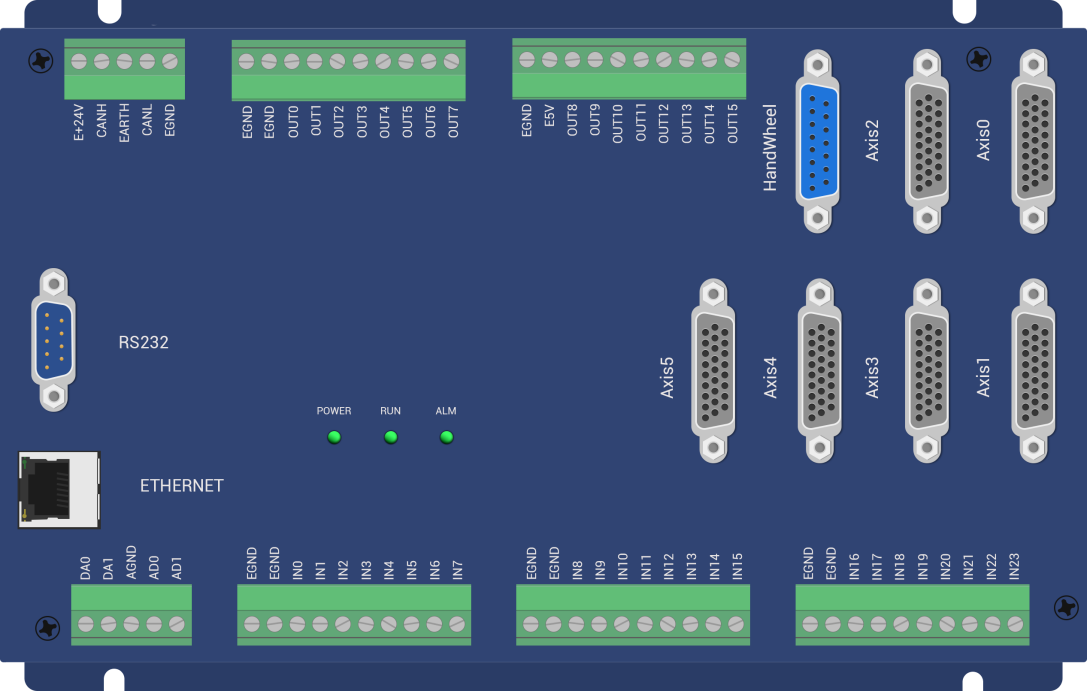
在正式学习之前,我们先了解一下正运动技术的运动控制卡ECI2828。这款产品是8轴运动控制卡。
正运动技术ECI2828 EtherCAT总线型运动控制卡,相对之前发布的ECI2618,新增了EtherCAT总线接口,电机轴数增加到8个,板载24+16点输入,16+16点输出(每个轴接口含2路通用输入和2路通用输出,可以做伺服使能、报警清除、到位信号、报警信号等控制);每轴输出脉冲频率可达10MHz;通过 CAN 总线,可扩展到512 个隔离输入或输出口。ECI2828支持硬件比较输出、精准输出、飞拍等功能。

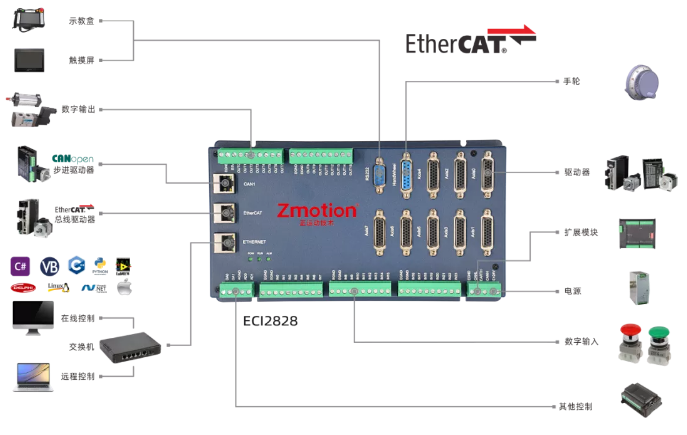
运动控制卡ECI2828,支持C++、C#、LabVIEW、VB、Delphi、Linux、.Net平台、iMac、Python、Matlab等,统一的上位机API函数接口,具有开放、兼容、简单、易用等功能特性。
一 新建MFC项目 添加函数库
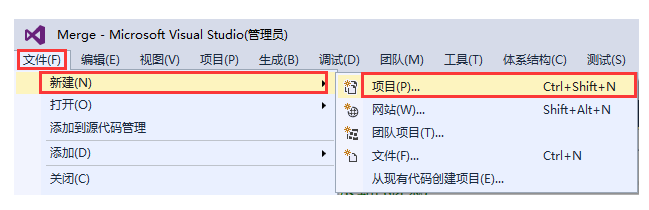
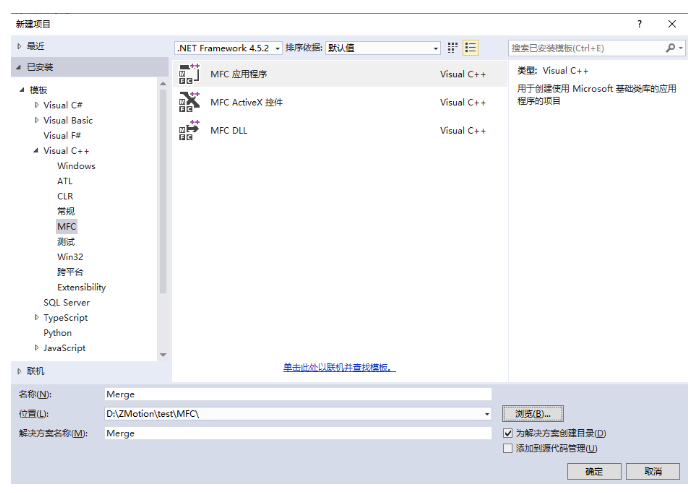
1.在VS2015菜单“文件”→“新建”→ “项目”,启动创建项目向导。
2.选择开发语言为“Visual C++”和程序类型“MFC应用程序”。
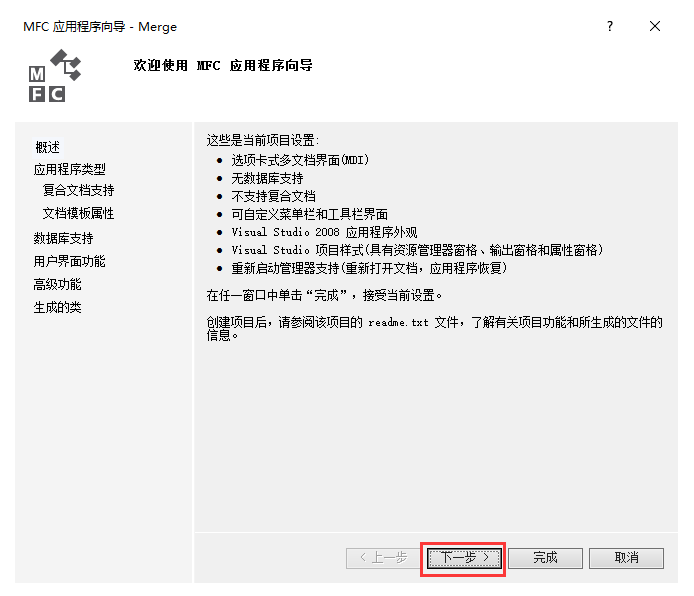
3.下一步即可。
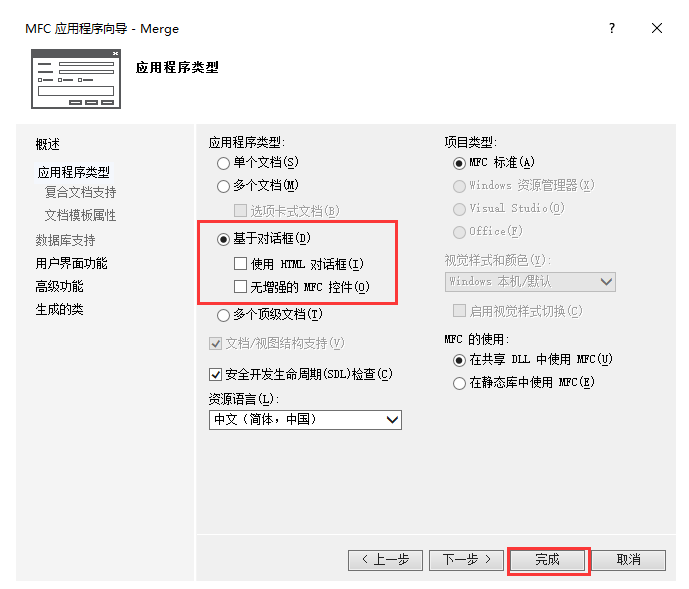
4.选择类型为“基于对话框”,下一步或者完成。下一步则往后继续配置,完成就直接完成即可。这里就不需要再配置了,无关紧要的,只要这个类型选好就行,其他的可以在项目中编辑。
5.找到正运动技术厂家提供的光盘资料,路径如下(64位库为例):
(1)进入光盘资料找到PC函数文件夹。
(2)选择函数库2.1。
(3)Windows平台。
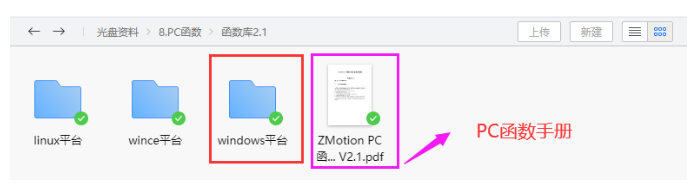
(4)根据需要选择对应的函数库这里选择64位库。

(5)解压C++的压缩包,里面有C++对应的函数库。
(6)函数库具体路径如下。
6.将厂商提供的C++的库文件和相关头文件复制到新建的项目里面。
7.在项目中添加静态库和相关头文件。
静态库:zauxdll.lib, zmotion.lib
相关头文件:zauxdll2.h, zmotion.h
(1)先右击头文件,接着依次选择:“添加”→“现有项”。
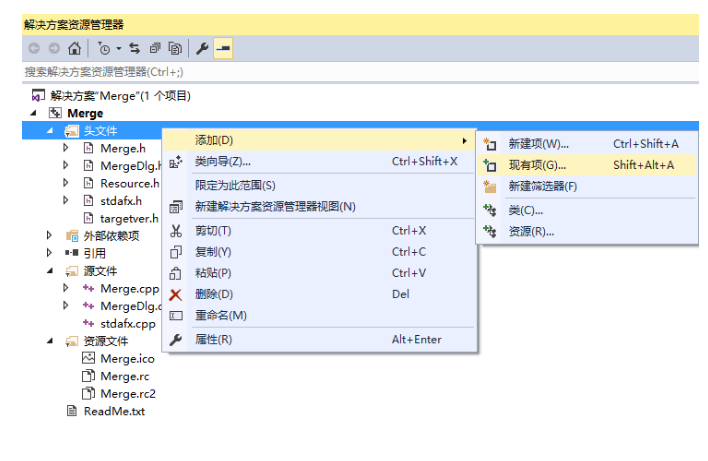
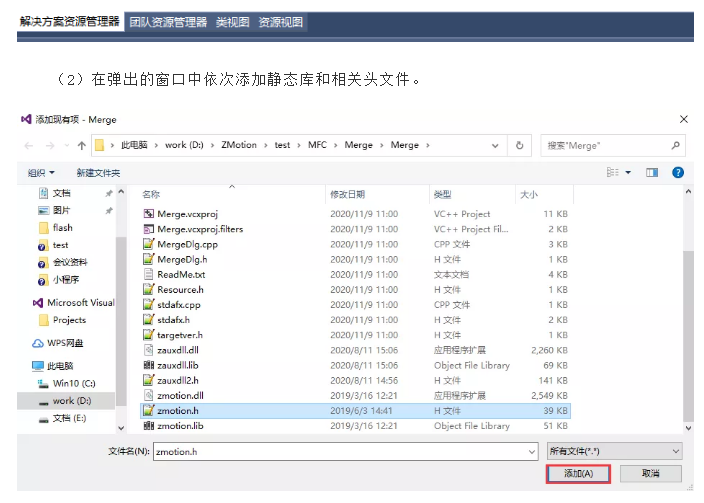
(2)在弹出的窗口中依次添加静态库和相关头文件。
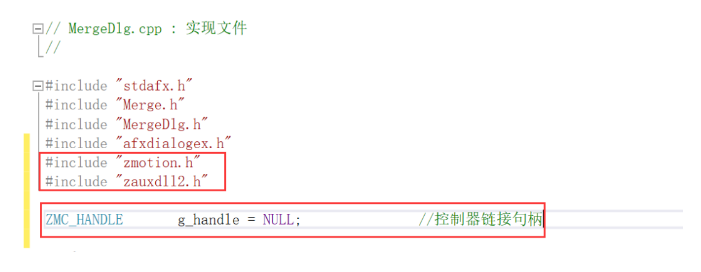
8.声明用到的头文件和定义控制器连接句柄。
至此项目新建完成。
二 查看PC函数手册 了解PC函数用法
1.PC函数手册也在光盘资料里面,具体路径如下:
2.PC编程,一般先根据控制器连接方式选择对应的连接函数连接控制器,返回控制器句柄。接着用返回的控制器句柄,实现对控制器的控制。
3.比如通过网口连接控制器,先使用ZAux_OpenEth()链接控制器,获取控制器句柄handle。

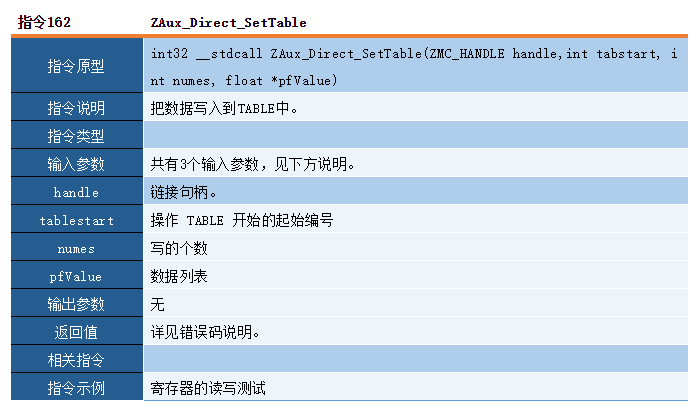
4.通过获取到的控制器句柄,使用ZAux_Direct_SetTable,来设置控制器的TABLE寄存器的数值。
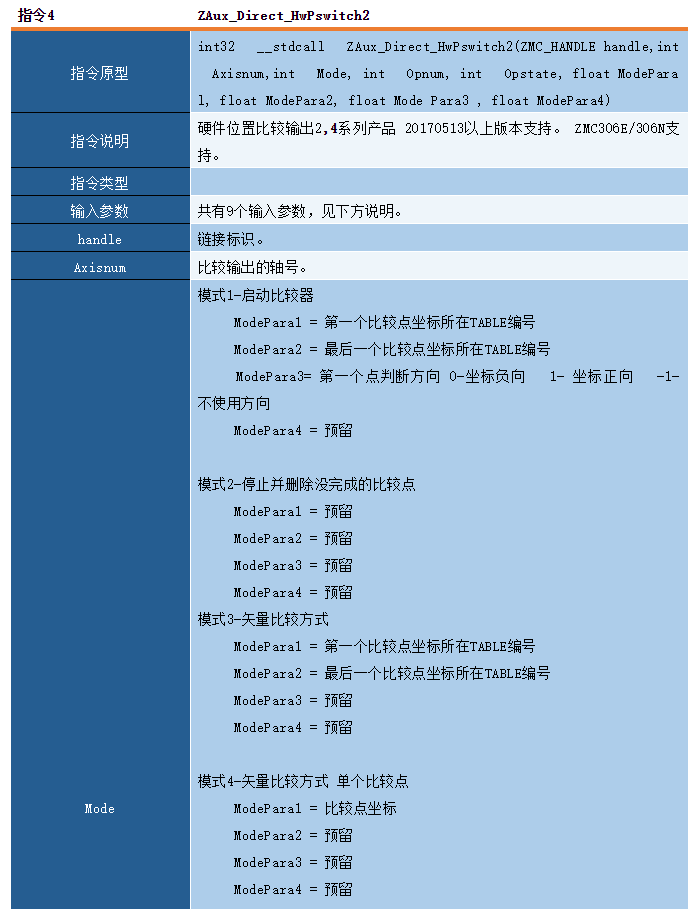
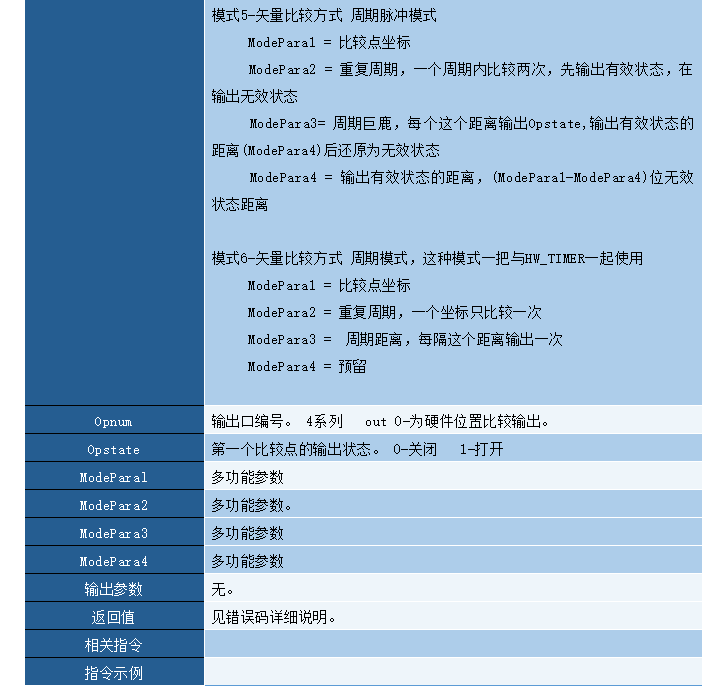
5.通过获取到的控制器句柄,使用ZAux_Direct_HwPswitch2,来启动并设置控制器的硬件比较输出的模式。
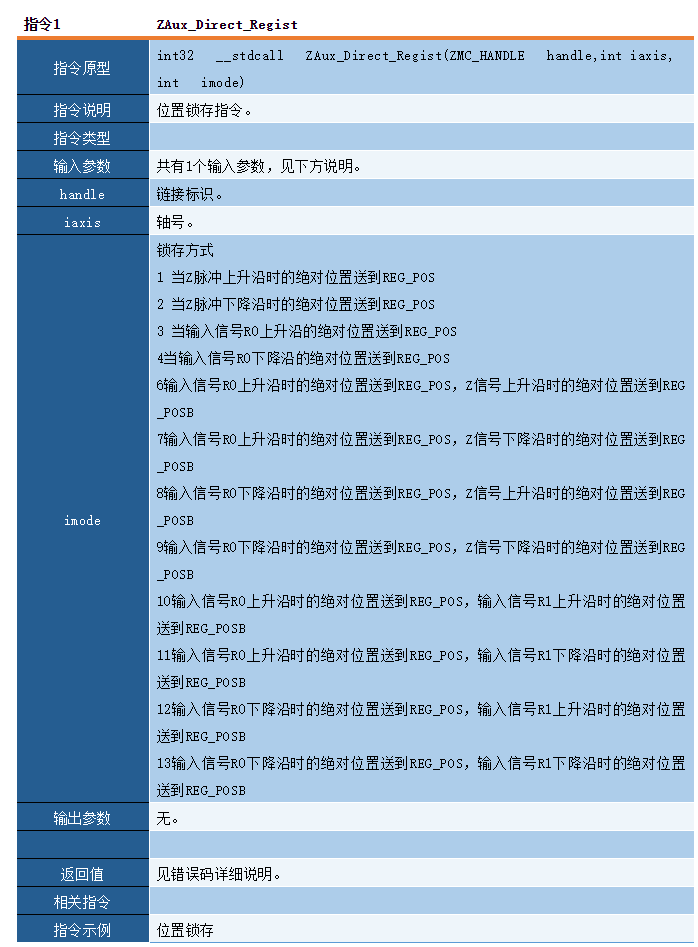
6.通过获取到的控制器句柄,使用ZAux_Direct_Regist()来启动并设置控制器的锁存方式。
三 项目实战之硬件比较输出例程讲解
1.硬件比较输出
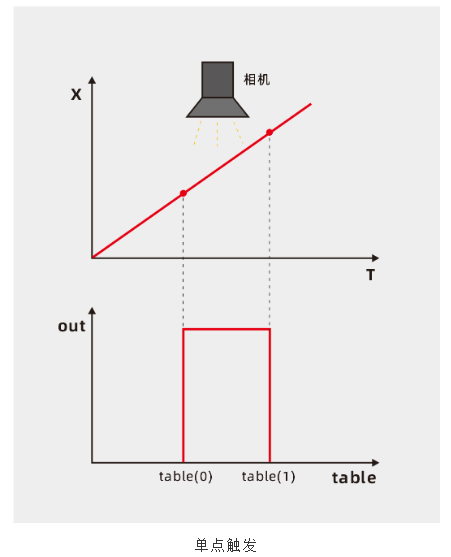
运动控制器内有位置比较单元,硬件比较输出是通过比较轴是否到达设定位置,来操作输出口动作,一般使用时将编码器位置与设定位置比较,当编码器的位置到达一个设定比较位置时,触发相应输出口电平翻转一次。
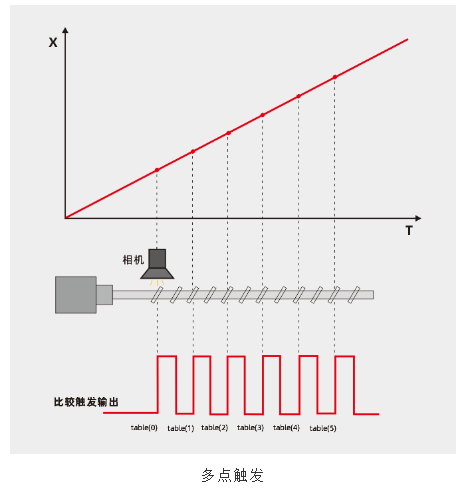
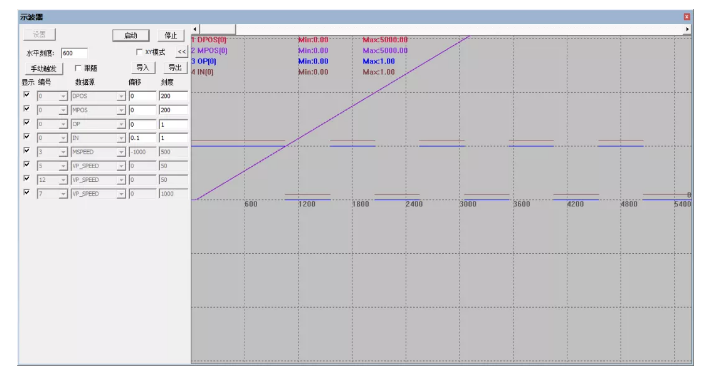
如下图所示,到达设置的位置1,电平翻转,到达位置2电平再次翻转,到达位置3电平再翻转,直达比较完所有的点后,电平维持最后一次翻转后的状态。

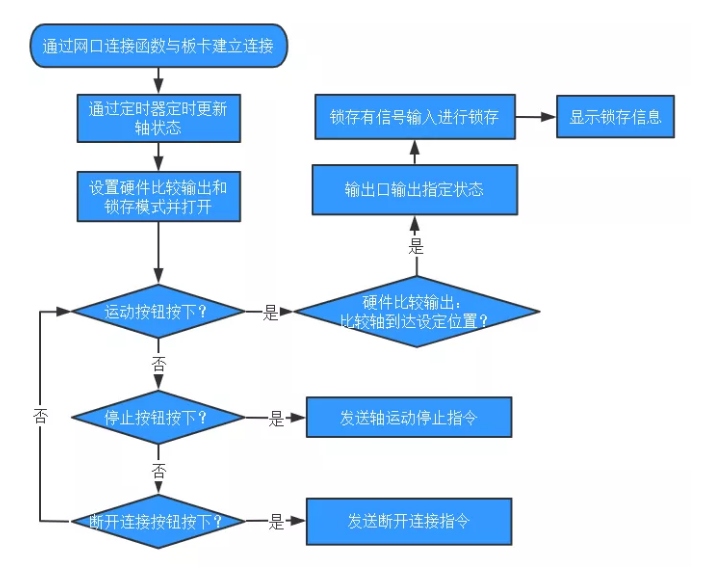
2.例程以建立板卡的连接,然后设置并开启硬件比较输出,将硬件比较输出的输出口和锁存的输入口进行连接,从而通过锁存记录硬件比较输出的位置。
(1)为了实验室测试方便,采用自发脉冲,同一轴编码器接收脉冲模式测试。同一个DB26轴接口的脉冲轴和编码器轴的连接方式(用于锁存硬件比较输出的位置),PUL+接EA+、PUL-接EA-、DIR+接EB+、DIR-接EB-。(或者直接通过脉冲型伺服电机进行位置反馈。)
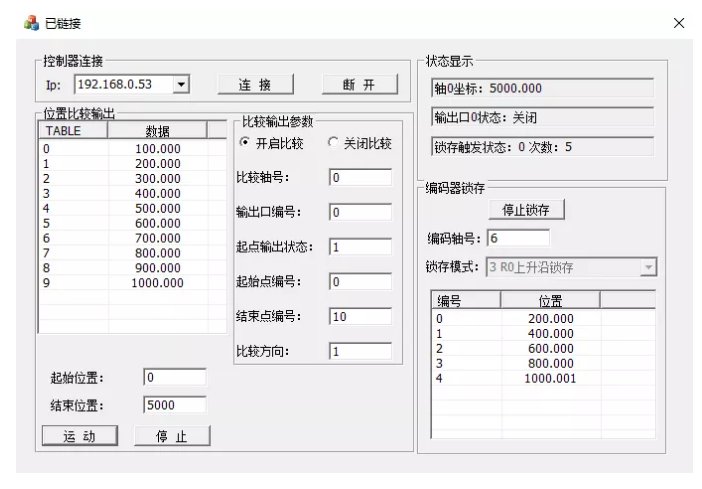
(2)例程界面。
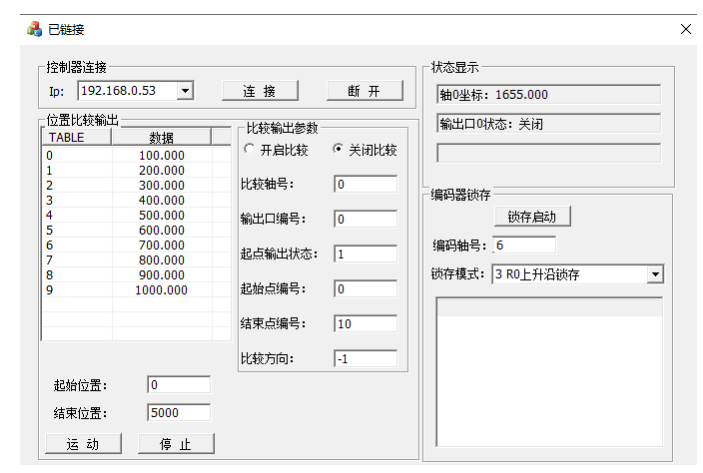
3.例程简易流程图。
4.通过网口连接控制器,获取控制器连接句柄。
//连接控制器
void Ctest_PswitchDlg::OnBnClickedOpen()
{
char buffer[256];
int32 iresult;
//从下拉框中获取IP地址
GetDlgItemText(IDC_IPLIST,buffer,255);
buffer[255] = '\0';
//通过网口连接控制器
iresult = ZAux_OpenEth(buffer, &g_handle);
if(ERR_SUCCESS != iresult)
{
g_handle = NULL;
MessageBox(_T("链接失败"));
SetWindowText("未链接");
return;
}
SetWindowText("已链接");
SetTimer(0,100,NULL);
}
5.通过运动按钮的事件处理函数去设置硬件比较输出的模式,并开始轴运动。
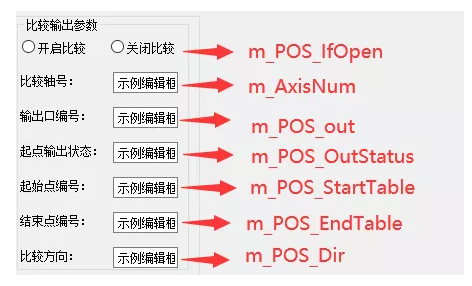
(1)通过对UI界面的控件添加对应的变量,实现硬件比较输出的模式的参数输入。
(2)运动按钮事件处理函数。
//运动
void Ctest_PswitchDlg::OnBnClickedStartmove()
{
m_RegistCount = 0;
ShowRegistList();
UpdateData(TRUE);
//设置轴参数
ZAux_Direct_SetAtype(g_handle, m_AxisNum, 1);
ZAux_Direct_SetUnits(g_handle, m_AxisNum, 1000);
ZAux_Direct_SetSpeed(g_handle, m_AxisNum, 200);
ZAux_Direct_SetAccel(g_handle, m_AxisNum, 2000);
ZAux_Direct_SetDecel(g_handle, m_AxisNum, 2000);
//关闭硬件比较输出(停止并删除没有完成的比较点)
ZAux_Direct_HwPswitch2(g_handle, m_AxisNum, 2, 0, 0, 0, 0, 0, 0);
//开启硬件比较输出 MODE:1
if (m_POS_IfOpen == false) //比较完成一次后需要重新调用HwPswitch
{
//将比较点填入TABLE
ZAux_Direct_SetTable(g_handle, m_POS_StartTable, m_POS_EndTable- m_POS_StartTable+1, fPointPos);
//开启硬件比较输出
ZAux_Direct_HwPswitch2(g_handle, m_AxisNum, 1, m_POS_out, m_POS_OutStatus, m_POS_StartTable, m_POS_EndTable, m_POS_dir, 0);
}
else
{
//关闭硬件比较输出
ZAux_Direct_HwPswitch2(g_handle, m_AxisNum, 2, 0, 0, 0, 0, 0, 0);
}
//打开示波器
ZAux_Trigger(g_handle);
ZAux_Direct_SetDpos(g_handle, m_AxisNum, 0);
//开始轴运动(绝对位置)
ZAux_Direct_Single_MoveAbs(g_handle, m_AxisNum, m_Start_Pos);
ZAux_Direct_Single_MoveAbs(g_handle, m_AxisNum, m_End_Pos);
}
6.根据设置情况判断是否开启锁存,并设置锁存模式。
//启动或停止锁存
void Ctest_PswitchDlg::OnBnClickedRegistStart()
{
int iret = 0;
UpdateData(TRUE);
if(m_Regist_IfOpen == FALSE)
{
m_RegistCount = 0;
//必须是编码器轴才可以锁存
iret = ZAux_Direct_SetAtype(g_handle,m_RegistAxis,6);
//设置锁存模式
int ReglistListSel = ((CComboBox *) GetDlgItem(IDC_REGIST_MODE))->GetCurSel() ;
if(ReglistListSel >= 0 && ReglistListSel <=3)
{
RegistMode = ReglistListSel +1;
}
else if(ReglistListSel == 4 || ReglistListSel ==5)
{
RegistMode = 10 + ReglistListSel;
}
else if(ReglistListSel > 5 || ReglistListSel < 9)
{
RegistMode = 12 + ReglistListSel;
}
//开启锁存
iret = ZAux_Direct_Regist(g_handle,m_RegistAxis,RegistMode);
SetTimer(1,5,NULL);
m_Regist_IfOpen = TRUE;
SetDlgItemTextA(IDC_REGIST_START,_T("停止锁存"));
((CComboBox *)GetDlgItem(IDC_REGIST_MODE))->EnableWindow(FALSE);
ShowRegistList();
}
else
{
KillTimer(1);
m_Regist_IfOpen = FALSE;
SetDlgItemTextA(IDC_REGIST_START,_T("启动锁存"));
((CComboBox *)GetDlgItem(IDC_REGIST_MODE))->EnableWindow(TRUE);
}
}
7.通过定时器1,更新锁存信息。
void Ctest_PswitchDlg::OnTimer(UINT_PTR nIDEvent) //定时器刷新
{
if(NULL != g_handle)
{
CString str;
if(nIDEvent == 1)
{
int iret = 0;
int MarkStatus = 0;
float RegistPos;
//判断锁存是否触发
if(RegistMode >= 0 && RegistMode < 4)
{
iret = ZAux_Direct_GetMark(g_handle,m_RegistAxis,&MarkStatus);
}
else if(RegistMode >= 14 || RegistMode < 16)
{
iret = ZAux_Direct_GetMarkB(g_handle,m_RegistAxis,&MarkStatus);
}
else if(RegistMode >= 18 || RegistMode < 20)
{
float tempc;
iret = ZAux_Direct_GetParam(g_handle,"MARKC",m_RegistAxis,&tempc);
MarkStatus = (int)tempc;
}
else if(RegistMode >= 20 || RegistMode < 22)
{
float tempd;
iret = ZAux_Direct_GetParam(g_handle,"MARKD",m_RegistAxis,&tempd);
MarkStatus = (int)tempd;
}
//读取锁存的位置
if(MarkStatus == -1)
{
if(RegistMode >= 0 && RegistMode < =4)
{
iret = ZAux_Direct_GetRegPos(g_handle,m_RegistAxis,&RegistPos);
}
else if(RegistMode >= 14 || RegistMode < 16)
{
iret = ZAux_Direct_GetRegPosB(g_handle,m_RegistAxis,&RegistPos);
}
else if(RegistMode >= 18 || RegistMode < 20)
{
iret = ZAux_Direct_GetParam(g_handle,"REG_POSC",m_RegistAxis,&RegistPos);
}
else if(RegistMode >= 20 || RegistMode < 22)
{
iret = ZAux_Direct_GetParam(g_handle,"REG_POSD",m_RegistAxis,&RegistPos); }
m_RegistList.InsertItem(m_RegistCount,"");
str.Format(_T("%d"), m_RegistCount);
m_RegistList.SetItemText(m_RegistCount,0,str);
str.Format(_T("%.3f"), RegistPos);
m_RegistList.SetItemText(m_RegistCount,1,str);
m_RegistCount++;
//重新触发锁存
iret = ZAux_Direct_Regist(g_handle,m_RegistAxis,RegistMode);
}
str.Format(_T("锁存触发状态:%d 次数:%d"), MarkStatus,m_RegistCount);
SetDlgItemTextA(IDC_STATUS_REGIST,str);
}
}
CDialogEx::OnTimer(nIDEvent);
}
8.通过停止按钮的事件处理函数来停止运动。
//停止
void Ctest_PswitchDlg::OnBnClickedStopmove()
{
int iret = ZAux_Direct_Single_Cancel(g_handle, m_AxisNum, 2);
}
9.编译运行演示。
(1)将硬件比较输出的输出口(out0)和锁存的输入口(in0)用导线进行连接,将轴0的DB26接口上的脉冲轴和编码器轴进行连接。
(2)编译并运行例程。
(3)同时通过ZDevelop软件连接同一个控制器,通过示波器对运动过程进行监控。
-
工控
+关注
关注
6文章
236浏览量
28221 -
运动控制
+关注
关注
4文章
581浏览量
32876 -
运动控制卡
+关注
关注
7文章
113浏览量
15468 -
工厂自动化
+关注
关注
1文章
47浏览量
17232 -
正运动技术
+关注
关注
0文章
102浏览量
423
发布评论请先 登录
相关推荐



PCIe EtherCAT实时运动控制卡PCIE464的IO与编码器读写应用
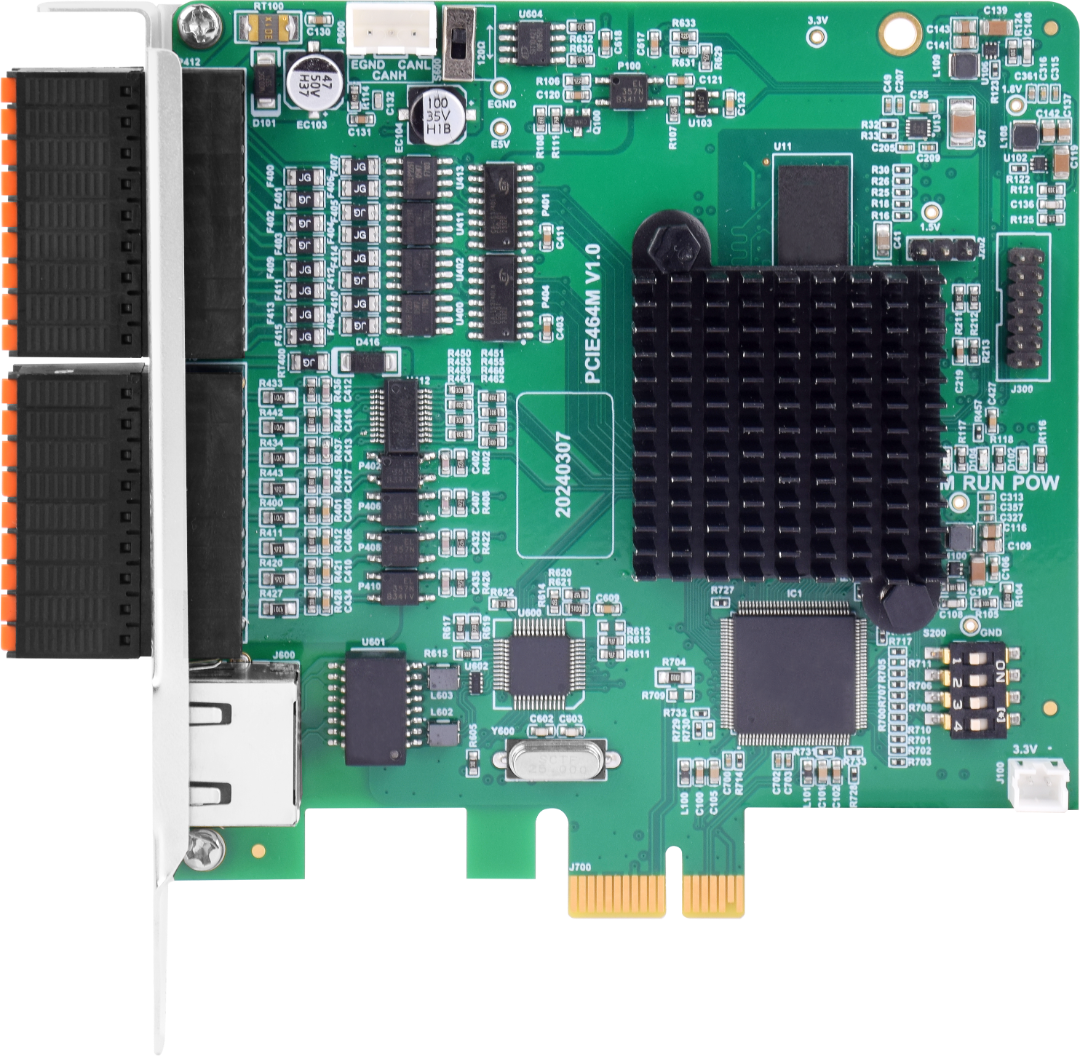

超高实时性的EtherCAT运动控制卡——PCIE464
【正运动】高速高精,超高实时性的PCIe EtherCAT实时运动控制卡 | PCIE464
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)





 工商网监
工商网监
评论