 使用激光位移传感器进行测量时需要考虑那些因素
使用激光位移传感器进行测量时需要考虑那些因素
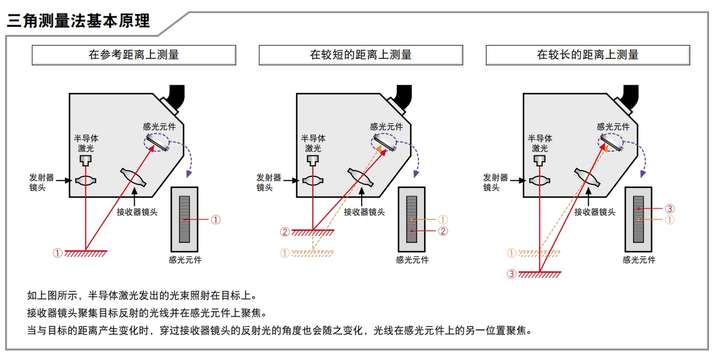
当今市场上的大多数非接触式激光三角位移传感器都使用相同的测量原理,即激光三角测量技术,将目标距离转换为输出信号。然而,传感器机械、光学、机械稳定性和信号处理算法的个性化设计可能因供应商而异。
有许多因素在确定实际激光传感器精度方面都起着重要作用。因此,不仅要了解这些因素以及它们在多大程度上影响传感器精度,而且还要了解传感器供应商最近开发的创新技术,以帮助克服这些潜在错误,这一点至关重要。
目标光学特性的动态变化

现在可以实时补偿从目标表面接收到的反射光从不断变化的表面进入激光的变化。对于每个测量值,曝光时间或激光产生的光量可以与目标表面的反射特性进行最佳匹配,而无需应用任何平均滤波器。这导致曝光与被测量的表面条件完美匹配,从而产生稳定和正确的测量值。然而,并非所有传感器供应商都能提供这种自动实时表面补偿功能,从而导致输出测量值出现错误。
标准的市售激光三角位移传感器通常采用时移控制进行操作,该控制对从先前测量周期接收到的强度值进行操作。在这种情况下,来自先前测量的反射量(通常为3到5)被平均,然后用于预测下一次测量所需的激光强度量。对于变化的或有纹理的表面,这种表面补偿方法产生的测量值与实际测量值明显不同。
优化表面粗糙度
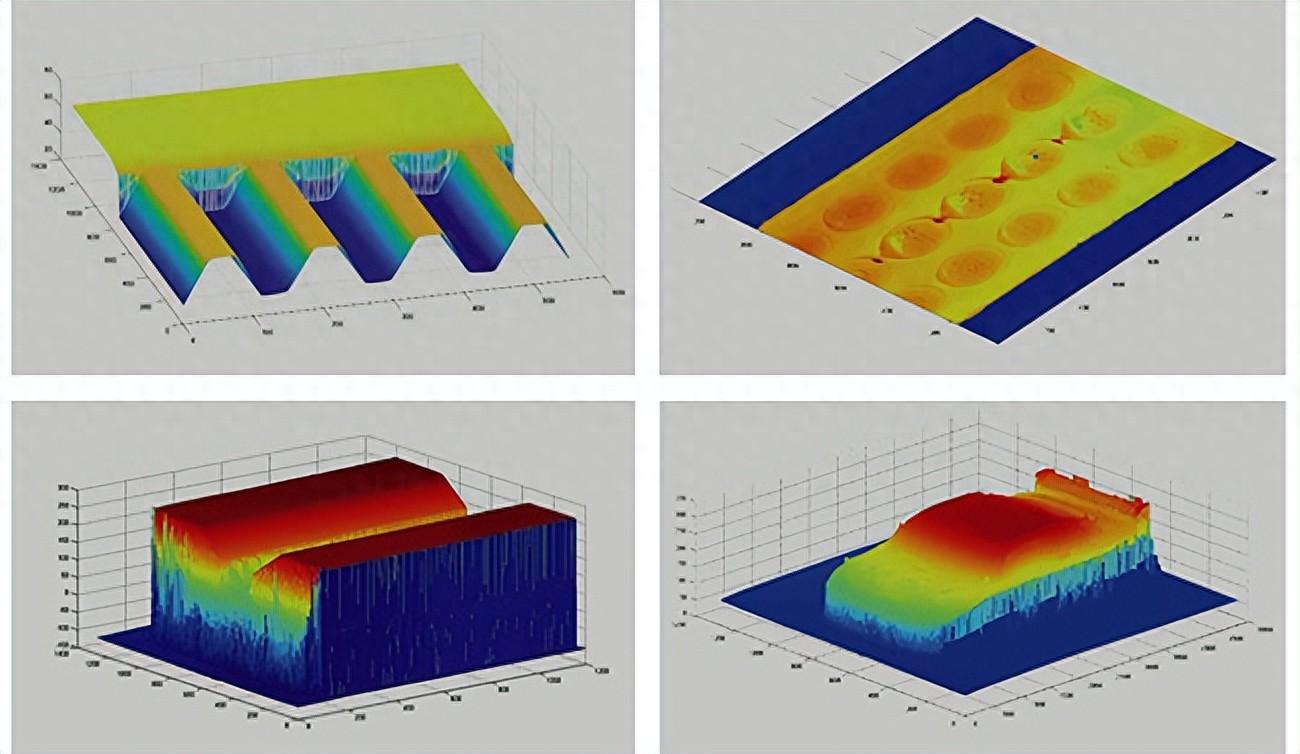
在表面有微小微加工痕迹的闪亮金属或加工表面上进行测量时,不建议使用小的激光光斑。这是因为微加工表面特征会使来自小点的反射光失真,从而导致测量信号嘈杂或不稳定。克服这个问题的一个解决方案是生产具有不同光斑几何形状的激光位移传感器。简单地移动到更大的激光光斑可能会克服上述一些问题,但这会产生降低传感器分辨率的不利影响。通常,具有大光斑的激光传感器具有较大的测量范围,这会导致较大的线性误差。
因此,一些激光传感器制造商制造了具有仅几毫米宽的短“激光线”光斑的高分辨率激光传感器。结合特定的软件算法,这种组合可以极好地滤除亚微米范围内由表面粗糙度、缺陷、压痕或孔洞引起的任何干扰,尤其是在抛光金属上。
此外,这些类型的传感器非常适合在结构化表面上进行测量,其中需要测量到表面的距离而不是结构本身,即距离测量不应受表面结构的影响,而应提供与目标的距离的恒定、可靠值。
-
焊缝跟踪
+关注
关注
0文章
194浏览量
10448
发布评论请先 登录
相关推荐
行业知识 | CMOS激光位移传感器如何实现高精度测量?

选择数据采集器时需要考虑的因素
高精度位移传感器检测装置,提高测量精度和检测效率

哪种传感器可以非接触测量1um精度的位移量?
2024年最新激光位移传感器十大品牌排名

明治【激光位移传感器】MLD25高效使用指南
电涡流位移传感器的量程与哪些因素有关
电涡流位移传感器的测量原理是什么
让激光位移传感器更精准,安装的时候需要注意这些细节







 工商网监
工商网监
评论