 技术分享 | 使用TSMaster从零打造车辆控制器HIL实时仿真系列4
技术分享 | 使用TSMaster从零打造车辆控制器HIL实时仿真系列4
HIL实时仿真系列4
今天我们接着上一章节的内容继续介绍如何基于TSMaster打通ECU算法与整车模型之间的桥梁。
SDK融入TSMaster运行环境
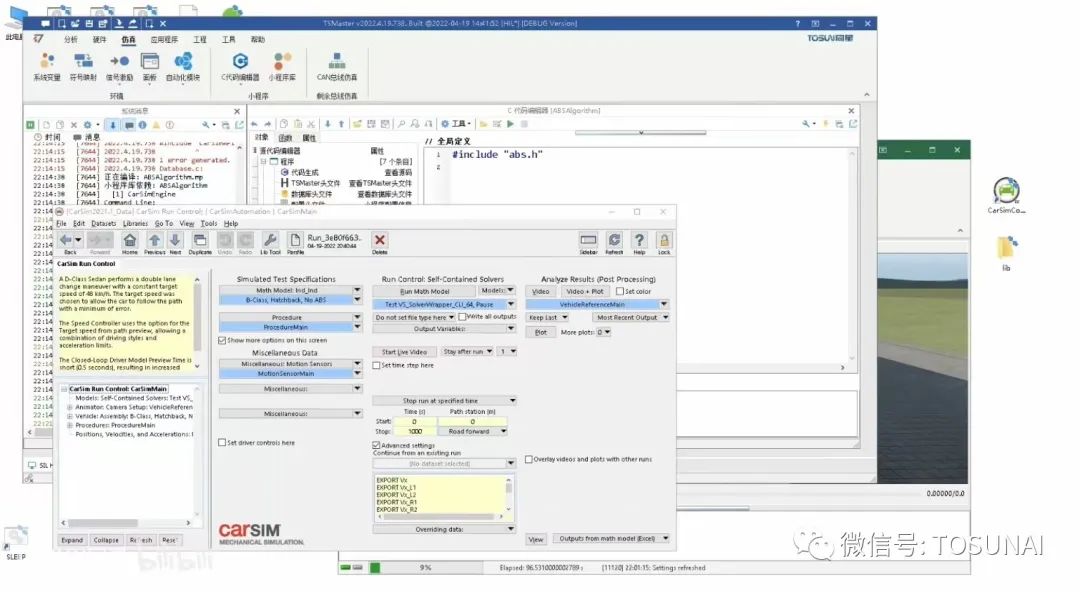
由于此视频采用了CarSim controller自带的CarSim engine客户端,需要对代码库做一些配置,也就是需要引用CarSim controller开发包的相关sdk文件。我们打开ABS算法小程序的代码库。
向上进入common文件夹,这个文件夹可存放多个小程序公共的头文件和代码文件,我们将SDK文件拖入此文件夹中。
接着转到全局定义中,第一行代码,引用一个C++头文件 #include "CarSimAPIUtilities.hpp"。
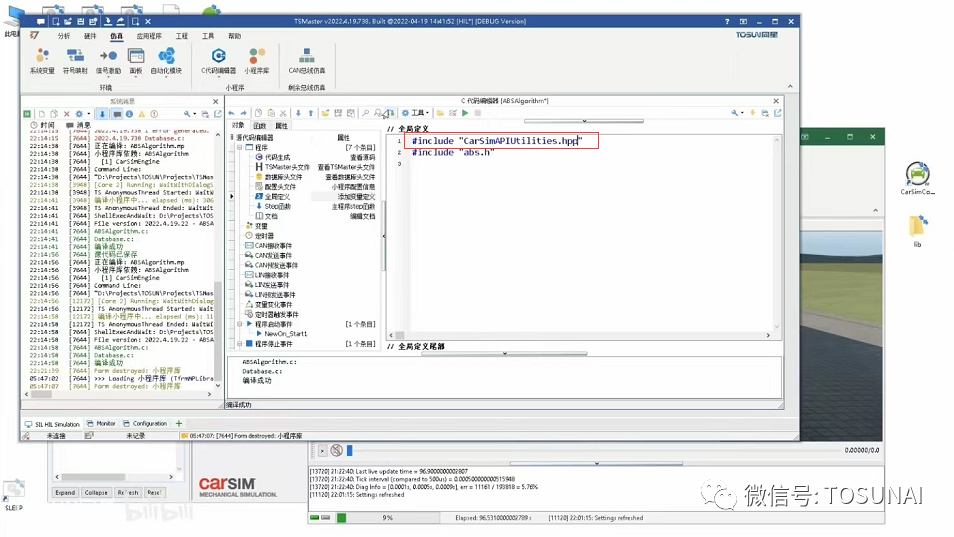
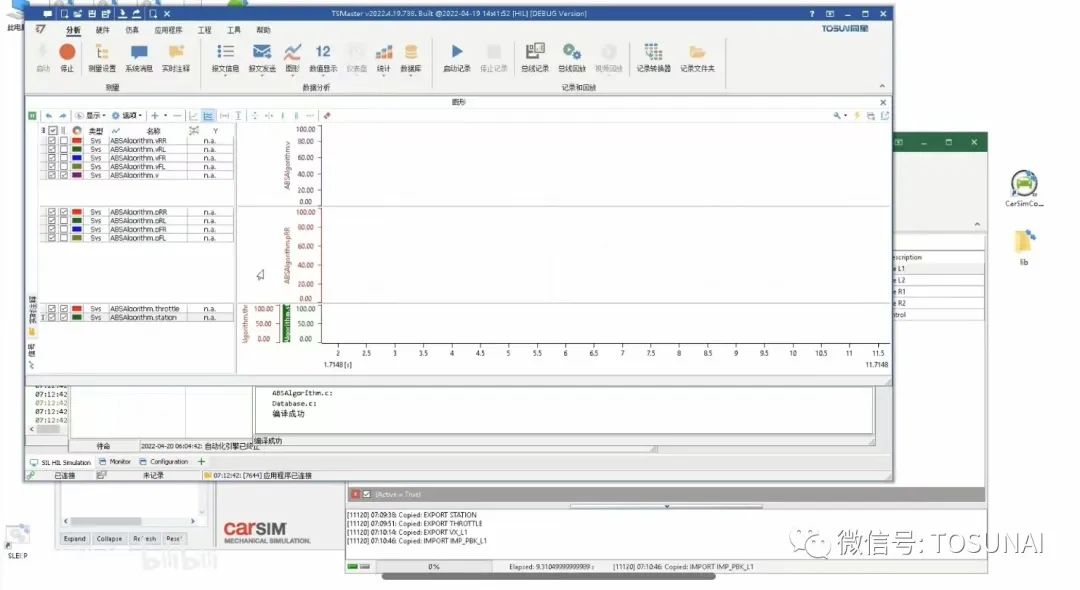
随后点击编译,可以看到,SDK也融入了TSMaster的运行环境中。
SDK控制动力学模型
接下来我们就可以通过调用SDK来轻松控制动力学模型了。
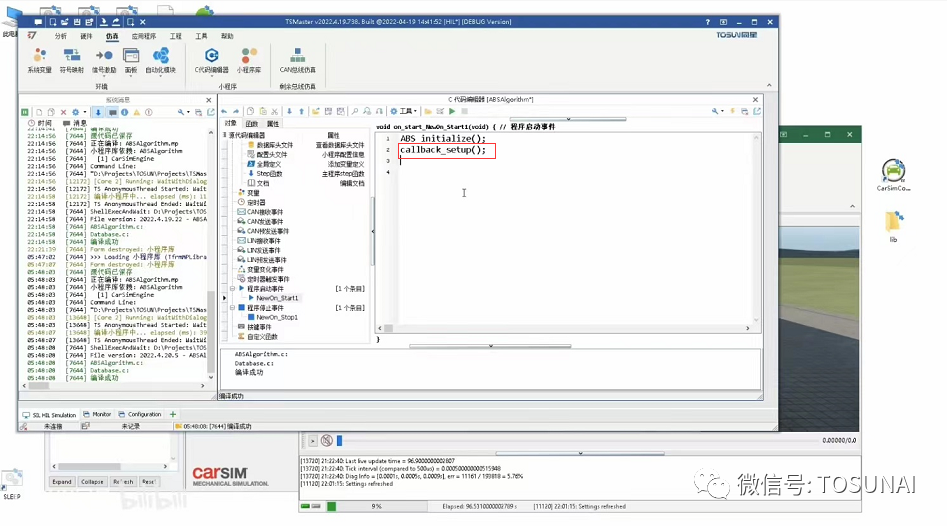
我们可以使用CarSim engine自带的这 47 个API函数来操作CarSim,当然也可以选用基于CarSim engine开发的SDK来实现,相比起来SDK的函数更加简洁,它将整个 CarSim的控制分为三个阶段:初始化、运行、和结束运行。
初始化函数名为 callback_setup,放在程序启动事件中。
运行函数名为 callback_start_carsim,放在step函数中,并且让它只执行一次;这需要再申请一个全局变量 vToStart,来实现单次操作。
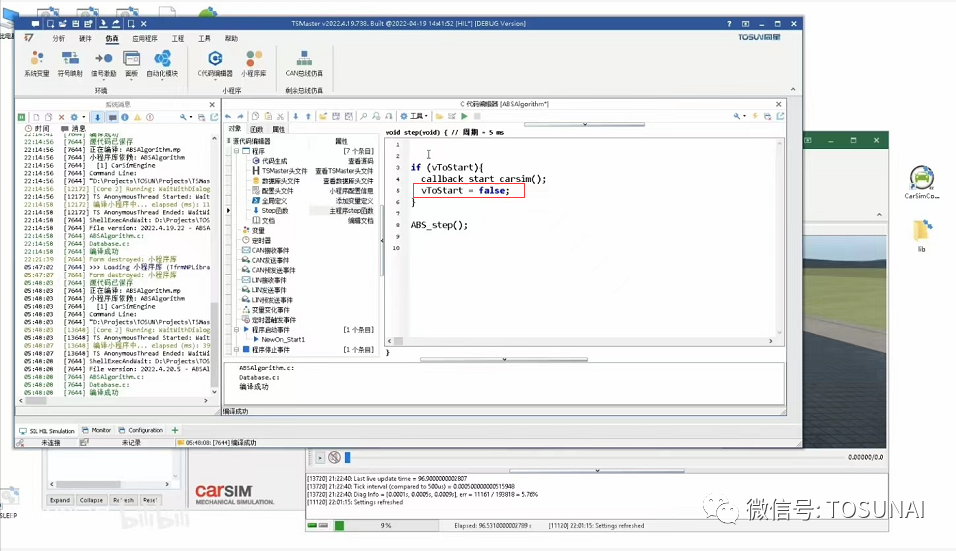
结束运行函数名为 callback_teardown,放在程序停止事件中;写完后我们编译程序,运行程序。
车辆加速仿真试验
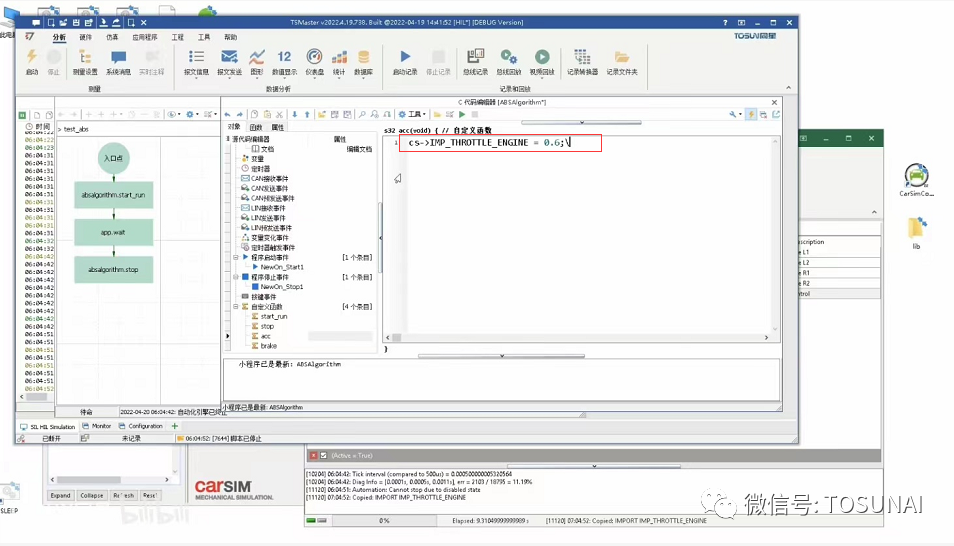
接下来我们尝试加速车辆,并在车速高于80kph时,紧急制动,要完成这个操作,只需要在我们的ABS小程序中,再自 定义两个API函数即可,我们将这两个函数分别命名为acc和brake。
在acc中,我们操纵油门,此时需要到CarSim controller中拷贝输入变量名,throttle,cs-
>IMP_THROTTLE_ENGINE = 0.6;
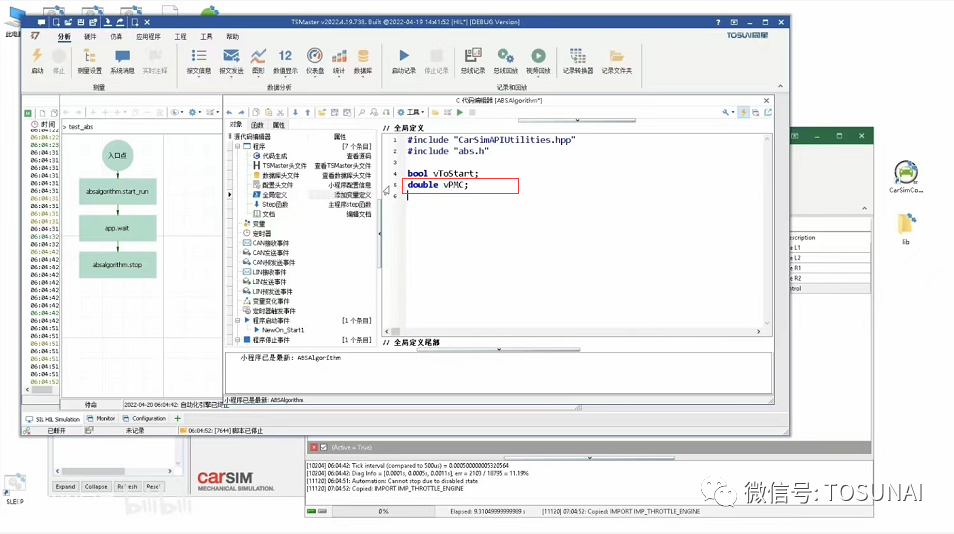
在brake中,我们模拟驾驶员以150 bar的压力踩下制动踏板进行紧急制动,这就需要设置主缸压力为15MPa,我们设置一个全局变量 vPMC 来接收这个主缸压力,同时,还需要到全局定义中声明这个 vPMC。
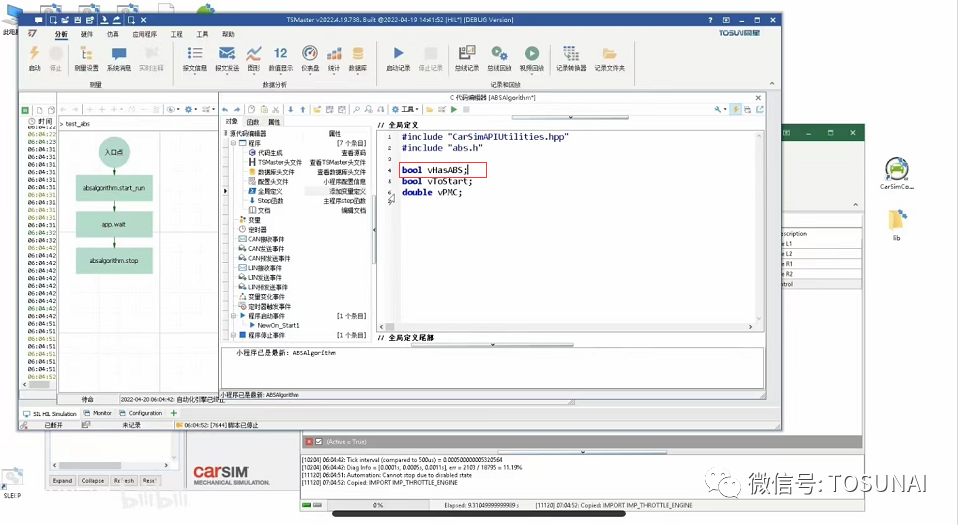
为了对比有无ABS的制动效果,我们首先尝试没有ABS算法的情况,那么这个压力将直接作用在四个轮缸上,这里还需声明一个变量 vHasABS,默认为假。
接着来到step函数中,通过 vHasABS 来区分算法的执行与否,若没有执行算法,则直接赋值轮缸压力。
完成逻辑之后,我们需要观测轮速和压力,这些变量都来自于整车模型,如何观测呢?我们可以使用小程序的变量将其表达出来。

转到变量组上,点击右键添加变量表,依次输入车速,行驶距离,油门,各个轮速和各个压力值。点击确定后,一系列变量变申明好了,与全局定义不同的是,这些变量是系统变量,可以被其他小程序,或是被graphics或者面板等等窗口获取并自动绘制曲线。
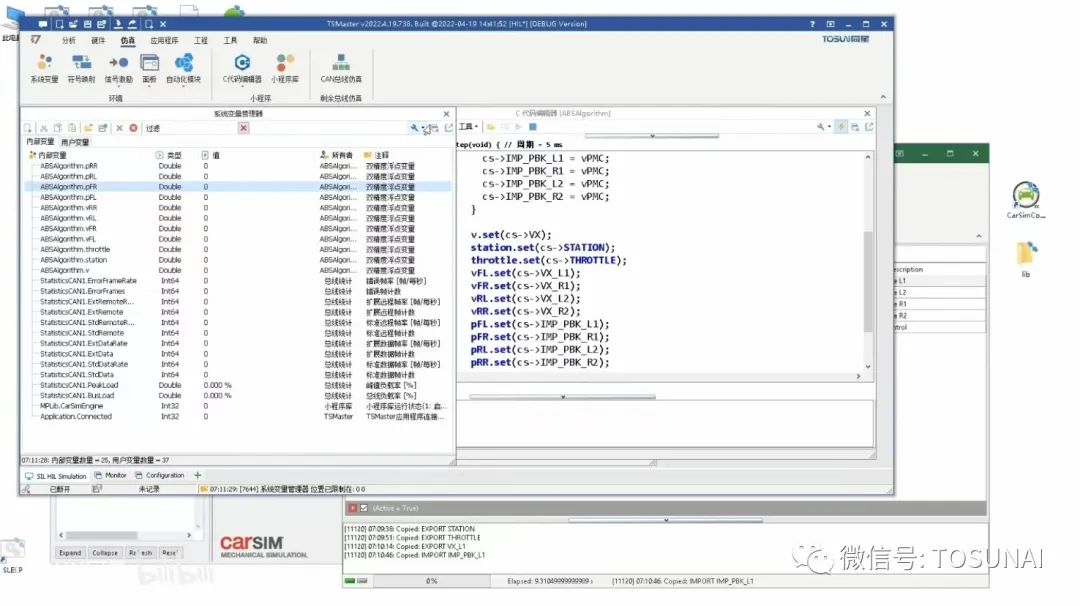
我们回到step函数,需要依次对这些系统变量进行赋值,赋值使用set操作
v.set(cs->VX);
station.set(cs->STATION);
throttle.set(cs->IMP_THROTTLE_ENGINE);
vFL.set(cs->VX_L1);
vFR.set(cs->VX_R1);
vRL.set(cs->VX_L2);
vRR.set(cs->VX_R2);
pFL.set(cs->IMP_PBK_L1);
pFR.set(cs->IMP_PBK_R1);
pRL.set(cs->IMP_PBK_L2);
pRR.set(cs->IMP_PBK_R2);
随后运行程序,打开系统变量表,就可以看到我们为这个小程序添加的一系列监控变量。
我们打开graphics,将图形分为三栏,上栏显示速度,中栏显示压力,下栏显示油门和行驶距离等信息,随后添加各个系统变量进行观测。
再转到自动化模块中,将我们现有的逻辑做一些修改,也就是启动后等待车辆加速到80公里每小时,再进行制动,只有制动到车速为0时,才停止仿真。(具体操作步骤详情可直接观看我们的B站视频哦~)
-
控制器
+关注
关注
112文章
16332浏览量
177813 -
HIL
+关注
关注
2文章
53浏览量
17667
发布评论请先 登录
相关推荐
优化电动汽车充电器控制:C-HIL技术与双有源桥实时仿真解决方案

基于TSMaster的MIL/HIL仿真开发(空簧和连续阻尼控制篇)

PPEC-HIL 三相整流逆变实时仿真测试

教学验证篇丨PPEC+HIL 单相逆变仿真验证
教学验证篇丨PPEC+HIL LLC拓扑仿真验证
PPEC+HIL LLC拓扑仿真验证

实战电力电子,从移相全桥仿真验证起步!
【分享】基于Easygo仿真平台的三电机实时仿真测试应用
快速控制原型RCP与硬件在环仿真HIL该如何区分呢?







 工商网监
工商网监
评论