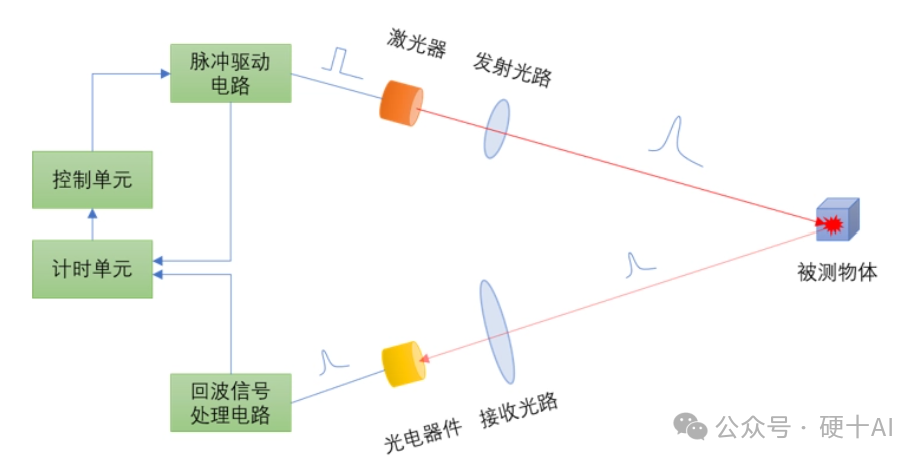
LIDAR系统包括一个单束窄带激光器和一个接收系统。激光器产生并发射一束光脉冲,打在物体上并反射回来,最终被接收器所接收。接收器准确地测量光脉冲从发射到被反射回的传播时间。因为光脉冲以光速传播,所以接收器总会在下一个脉冲发出之前收到前一个被反射回的脉冲。鉴于光速是已知的,传播时间即可被转换为对距离的测量。结合激光器的高度,激光扫描角度,从GPS得到的激光器的位置和从INS得到的激光发射方向,就可以准确地计算出每一个地面光斑的坐标X,Y,Z。激光束发射的频率可以从每秒几个脉冲到每秒几万个脉冲。举例而言,一个频率为每秒一万次脉冲的系统,接收器将会在一分钟内记录六十万个点。一般而言,LIDAR系统的地面光斑间距在2-4m不等。
激光雷达的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到地面的树木、道路、桥梁和建筑物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像。
深圳市不止技术有限公司是激光雷达行业头部知名企业,团队自2016年底就开始了多款激光雷达方案的研发,并创造了30多件发明专利,我们作为激光雷达行业5年多的资深老兵,对激光雷达有着深厚的技术积累。是一家能提供单点、单线到多线全系列、dtof、itof全品类激光雷达方案定制化的公司,而且掌握了机器人移动底盘技术。在激光雷达核心硬件、专用芯片、AI算法上具有完整的自主知识产权。
激光雷达最基本的工作原理与无线电雷达没有区别,即由雷达发射系统发送一个信号,经目标反射后被接收系统收集,通过测量反射光的运行时间而确定目标的距离。至于目标的径向速度,可以由反射光的多普勒频移来确定,也可以测量两个或多个距离,并计算其变化率而求得速度,这也是直接探测型雷达的基本工作原理。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
相关推荐
。随着技术的发展,激光雷达经历了从机械式到半固态再到固态的演变过程。本文将深入探讨固态和半固态激光雷达的工作原理、特点及其应用。 一、半固态激光雷达 半固态
![的头像]() 发表于
发表于 12-23 18:06
•184次阅读
随着激光雷达日益普及,人们开始担忧:这种发射激光的设备,对人眼的安全性如何?了解这个问题前,我们首先需要知道激光雷达和它发射的激光,到底是什么。
![的头像]() 发表于
发表于 11-07 10:47
•227次阅读

激光雷达是一种以发射激光束来探测目标位置、速度等特征量的雷达系统。 这个系统也可以通过扫描发射和接收装置来获取目标物体的三维形状,在不同角度发射和接收激光脉冲,可以构建出物体的完整三维
![的头像]() 发表于
发表于 11-07 09:28
•475次阅读
激光雷达(LiDAR,Light Detection and Ranging)是一种利用激光进行距离测量和目标识别的技术。它广泛应用于无人驾驶汽车、地理信息系统(GIS)、环境监测、航空航天等领域
![的头像]() 发表于
发表于 10-27 11:04
•984次阅读
一、激光雷达技术概述 激光雷达技术是一种基于激光的遥感技术,通过发射激光脉冲并接收反射回来的光来测量物体的距离和速度。与传统的雷达技术相比,
![的头像]() 发表于
发表于 10-27 10:57
•382次阅读
光学雷达和激光雷达是两种不同的遥感技术,它们在原理、应用、优缺点等方面都存在一定的差异。以下是对光学雷达和激光雷达的比较: 定义和原理 光学雷达
![的头像]() 发表于
发表于 08-29 17:20
•1327次阅读
(LiDAR) 优点: a. 高精度:激光雷达可以提供非常高的空间分辨率,精度可以达到厘米级别,这对于自动驾驶汽车等高精度应用非常重要。 b. 长距离测量:激光雷达可以测量数百米甚至上
![的头像]() 发表于
发表于 08-16 10:02
•1266次阅读
原理 激光雷达原理 激光雷达(Laser Radar) 通过发射激光束探测目标,测量反射回来的激光信号(目标回波)的到达时间、波束指向等参数,从而确定目标的位置、速度等特征量。其
![的头像]() 发表于
发表于 07-02 08:39
•4614次阅读

文章大纲 城市 NOA 成竞争高地,政策助力高阶智能驾驶加速落地 成本下探+智驾升级,2030年激光雷达市场规模有望超万亿 ·城市 NOA面临工况复杂问题,激光雷达为“优选
![的头像]() 发表于
发表于 06-27 08:42
•640次阅读

。市面上的雷达产品种类也非常丰富,那么如何才能选出真正适合自己需求的激光雷达呢?本期小明就来给大家说道说道~工作原理激光雷达的
![的头像]() 发表于
发表于 05-28 08:24
•837次阅读

硅基光电子技术的发展可以将激光雷达系统发射模块和接收模块中分立的有源和无源器件集成在芯片上,使激光雷达体积更小、稳定性更强、成本更低,推动激光雷达在自动驾驶等领域的应用。
发表于 04-08 10:23
•585次阅读

机载激光雷达是指安装在飞行器(如飞机、直升机、无人机等)上的激光雷达系统,用于从空中对地面或其他目标进行测量、成像和监测。
![的头像]() 发表于
发表于 03-21 16:49
•2946次阅读

激光雷达(LiDAR)的应用场景非常广泛,它由于探测波长短、波束定向性强、能量密度高等特点,具有高空间分辨率、高的探测灵敏度,并能分辨被探测物种,且不存在探测盲区。以下是激光雷达的一些主要应用场
![的头像]() 发表于
发表于 03-21 10:38
•1072次阅读
一、激光雷达LiDAR工作原理激光雷达LiDAR的全称为LightDetectionandRanging激光探测和测距,又称光学雷达。
![的头像]() 发表于
发表于 03-05 08:11
•5137次阅读

华为激光雷达是一种常用的传感器技术,可用于距离测量和感应。它的参数设置对于确保其性能和功能至关重要。在本文中,我们将详细介绍华为激光雷达的参数设置以及其影响和应用。 首先,我们需要了解激光雷达
![的头像]() 发表于
发表于 01-19 14:17
•1792次阅读
 激光雷达的工作原理与雷达非常相近!
激光雷达的工作原理与雷达非常相近!





 工商网监
工商网监
评论