 【虹科】从散装物料中全自动拣选未知产品
【虹科】从散装物料中全自动拣选未知产品
在内部物流中,无论是在贸易杂志上还是在展会上,近些年来一直有关于机器人技术的炒作。其中大多数是经典的六轴关节型机器人,它们正在寻找走出生产环境,进入物流领域的途径。目标是:完全自动化的小零件分拣。这里的主要驱动因素是劳动力短缺,最大的挑战不是像机器人或夹持器这样的技术组件,而是整体经济流程的设计。由于机器人只能处理每个分类中的一部分物品,存在平行的货物流,因此在货物流动、库存、同步和合并方面可能存在风险。
来自德国皮尔马森斯的psb intralogistics GmbH 的“自动拣选”机器人可以应对这一挑战。其核心是用于拣选单个物品的全自动解决方案,包括带一个夹具的机器人、整个系统的IT网络和一个强大的图像处理系统——配备了两台虹科Ensenso 3D相机。1
应用
视觉系统充当机器人的眼睛。由它检测容器中待处理物体的可抓取表面,并计算出机器人的抓取点和无碰撞路径。使机器人能够直接从散装物料中抓取未知产品,并将其放置在填充量最低的区域目标箱中。真空杯确保了对物体的轻柔抓取。无需预先对单个产品进行“示教”。无论是药瓶还是茶包,多功能夹持器都可以针对具体多样化包装的物品进行单独设计。随着时间的推移,系统会学习哪种不同的抓取器对每种物品的抓取效果会更好。可实现的拣选性能在很大程度上取决于抓取物体的特征,在每小时300到500件之间。
两台虹科Ensenso N35 3D相机为系统提供了必要的图像数据,都是基于“投影纹理立体视觉”原理工作的。每个型号的3D相机都使用了两个CMOS传感器和一个投影仪,即使在较差的照明条件下,也可以将高对比度结构光投射到要捕获的物体上。3D相机使用立体视觉操作,模仿人类视觉,输出目标对象的3D点云。为了将相机集成到自动取货系统中, psb intralogistics公司使用了配套的Ensenso SDK。除了用于轻松设置和支持3D相机校准外,还提供基于GPU的图像处理,以加快3D数据处理速度。支持在多相机中输出所有单个相机的3D点云,在本案例中这是不可或缺的,支持从多个观察方向实时组成3D点云。 两台Ensenso 3D相机为系统提供基本的图像数据第一台相机安装在物料箱子的上方,生成用于搜索产品最佳抓取位置的点云,这是在isys vision 的Mikado ARC(自适应机器人控制)软件的帮助下完成的。它将虹科Ensenso 3D立体相机技术与一个易于配置的自适应机器人控制器结合起来,组成了一个完整的3D机器人视觉解决方案,用于机器人自动拣选零件。不需要预定义、“机器学习”、设定动作路径,在系统工作时,自动计算定位,对各种情况做出反应。第二台相机安装在目标箱子上方。用于搜索空余的存储位置。除此之外,确定箱子体积和高度,在确认存储位置也能够将其考虑在内。至关重要的是,均匀地将产品小心放置在目标箱子。这对于拣选易碎部件时尤其重要。图像采集与机器人运动是异步的,以便优化周期时间。
“我们选择虹科Ensenso N35是因为它的紧凑设计和高质量点云。另外结合探测视场的考虑,N系列是理想的选择。”— PSB INTRALOGISTICS公司系统经理 —PSB INTRALOGISTICS公司的系统经理认为:“相机的配置可以根据产品的组合轻松而精确地进行调整,甚至可以在加工过程中进行调整,处理信息和分拣订单通过接口与仓库管理系统进行交换。”
两台Ensenso 3D相机为系统提供基本的图像数据第一台相机安装在物料箱子的上方,生成用于搜索产品最佳抓取位置的点云,这是在isys vision 的Mikado ARC(自适应机器人控制)软件的帮助下完成的。它将虹科Ensenso 3D立体相机技术与一个易于配置的自适应机器人控制器结合起来,组成了一个完整的3D机器人视觉解决方案,用于机器人自动拣选零件。不需要预定义、“机器学习”、设定动作路径,在系统工作时,自动计算定位,对各种情况做出反应。第二台相机安装在目标箱子上方。用于搜索空余的存储位置。除此之外,确定箱子体积和高度,在确认存储位置也能够将其考虑在内。至关重要的是,均匀地将产品小心放置在目标箱子。这对于拣选易碎部件时尤其重要。图像采集与机器人运动是异步的,以便优化周期时间。
“我们选择虹科Ensenso N35是因为它的紧凑设计和高质量点云。另外结合探测视场的考虑,N系列是理想的选择。”— PSB INTRALOGISTICS公司系统经理 —PSB INTRALOGISTICS公司的系统经理认为:“相机的配置可以根据产品的组合轻松而精确地进行调整,甚至可以在加工过程中进行调整,处理信息和分拣订单通过接口与仓库管理系统进行交换。”
2
应用前景
在线贸易具有强劲的增长前景,同时,电子商务领域正变得越来越艰难。因此,为了保持竞争力,对内部物流技术进行创新是必要的。拣选机器人带来的经济效益非常可观,从中长期来看,它们将会占有一席之地。基于人工智能的解决方案将学会掌握除抓取以外的其他挑战——完全自动化或与人类配合,可靠而精确。
 机器人从散装材料中拾取未知产品,并将其放入目标箱中,根据所拾取物品,每小时能拾取300—500件
机器人从散装材料中拾取未知产品,并将其放入目标箱中,根据所拾取物品,每小时能拾取300—500件
3
可靠、高速、精确的3D相机
HK Ensenso N35

-
GigE接口,紧凑的铝外壳
-
IP65/67
-
最大帧数(3D):10(2×Binning:30),64个视差等级
-
最大帧数(离线处理):30(2×Binning:70),64个视差等
-
专为高达3000毫米(N35)的工作距离和可变图像场而设计
-
输出单个3D点云,其中包含来自多相机模式下使用的所有相机的数据
-
从多个视角实时合成3D点云
-
集成FlexView技术,实现更复杂表面探测,生成高精度点云
-
基于“投影纹理立体视觉”原理捕捉无纹理表面

4
关于客户
Psb intralogistics公司为生产和分销企业内部规划和实施完整的物料流动和存储系统,具有超过130年的历史,已经发展成为欧洲内部物流领域的领先公司之一。为每个客户单独设计的解决方案在效率和成本效益方面明显优于“现成的”物流系统。-
机器人
+关注
关注
211文章
28490浏览量
207448 -
机器视觉
+关注
关注
162文章
4387浏览量
120427
发布评论请先 登录
相关推荐
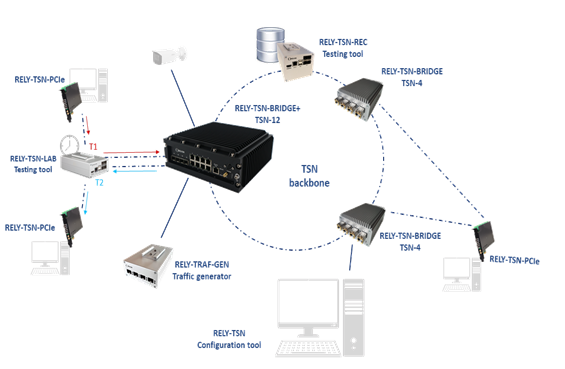
虹科方案 仅需4个步骤!轻松高效搭建虹科TSN测试网络
全自动晶圆划片机的应用产品优势

虹科电子12月事件回顾
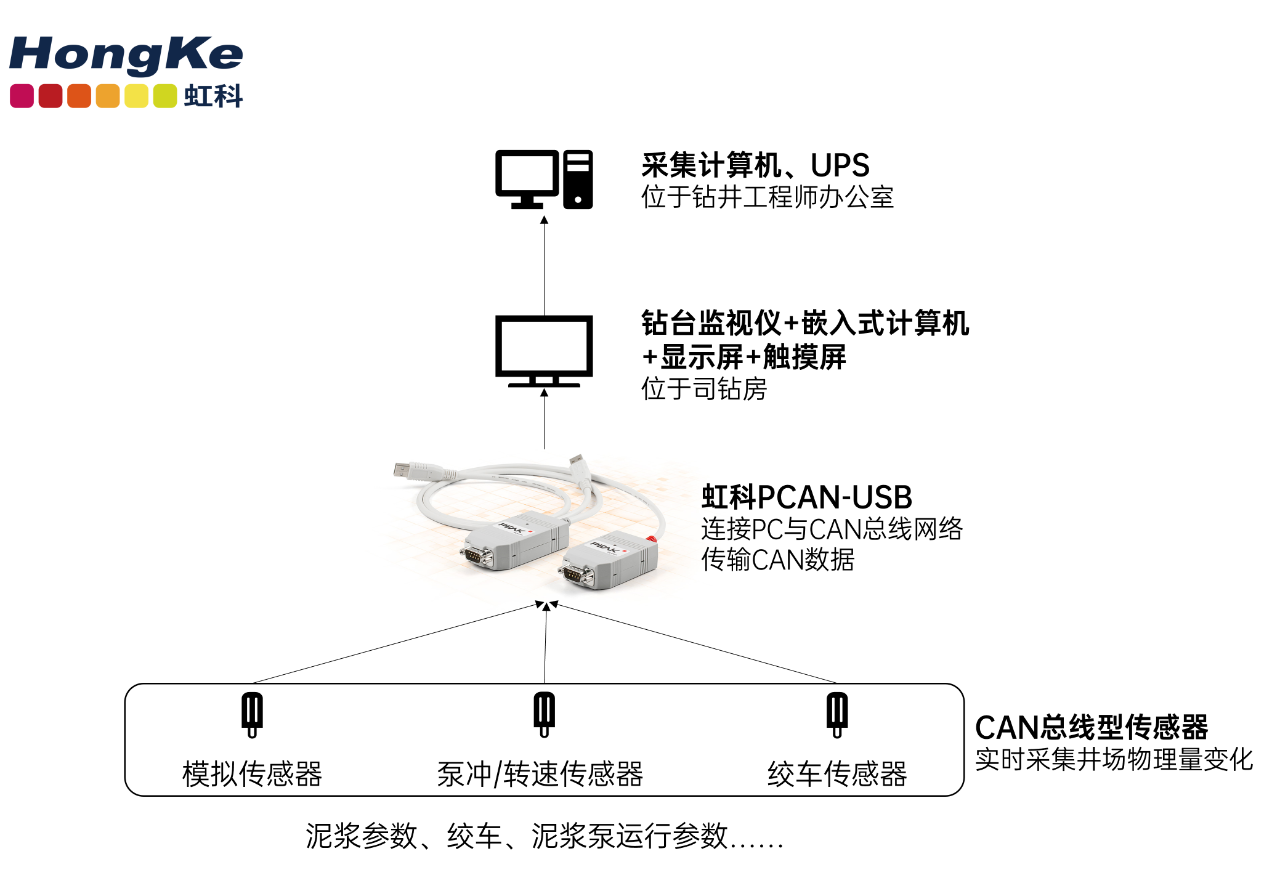
虹科应用 为什么虹科PCAN方案能成为石油工程通讯的首选?
关于全自动装车机器人的详细介绍
虹科展会丨再赴工博之约,来看虹科玩转自动化科技!

虹科方案 领航智能交通革新:虹科PEAK智行定位车控系统Demo版亮相

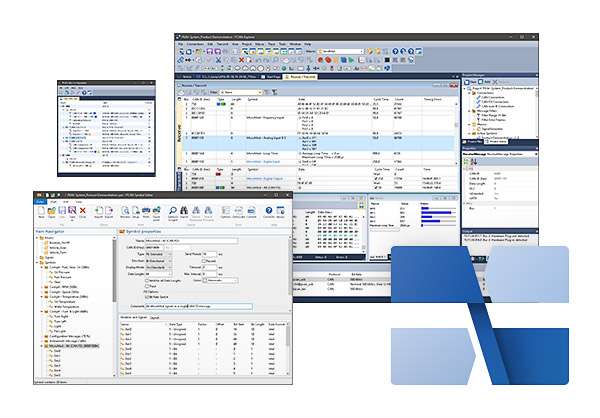
虹科应用 当CANoe不是唯一选择:发现虹科PCAN-Explorer 6
虹科案例 从设备连接到精准监控:虹科温度采集模块技术精讲

虹科直播 | 令你耳目一“新”的新能源车诊断分享
虹科新品 | E-Val Pro Plus有线验证解决方案
Quicktron快仓携自主研发的混合拣选方案QuickBin+亮相美国MODEX
虹科新品|Baby-LIN第三代系列产品全面升级,重塑车辆测试新体验

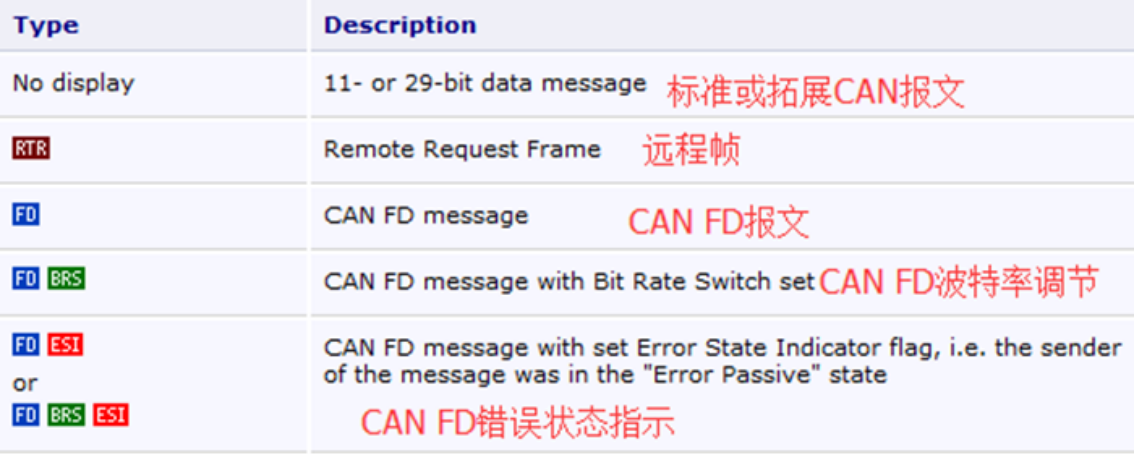
虹科分享 | PCAN工具:强大的CAN通讯解决方案,你了解多少?





 工商网监
工商网监
评论