 EasyGo FPGA Coder高速控制实例分享 ——基于有源阻尼控制的LCL滤波三相逆变器半实物仿真测试
EasyGo FPGA Coder高速控制实例分享 ——基于有源阻尼控制的LCL滤波三相逆变器半实物仿真测试
LCL构成的三阶滤波器具有更好的高次谐波衰减能力,可以在总电感值比L型滤波器电感值小很多的条件下,实现相同的滤波效果。但是LCL滤波器本身存在谐振问题,为提高稳定性,一般会考虑加入虚拟阻尼控制的方式,通过叠加补偿电流反馈来达到系统稳定控制的效果。
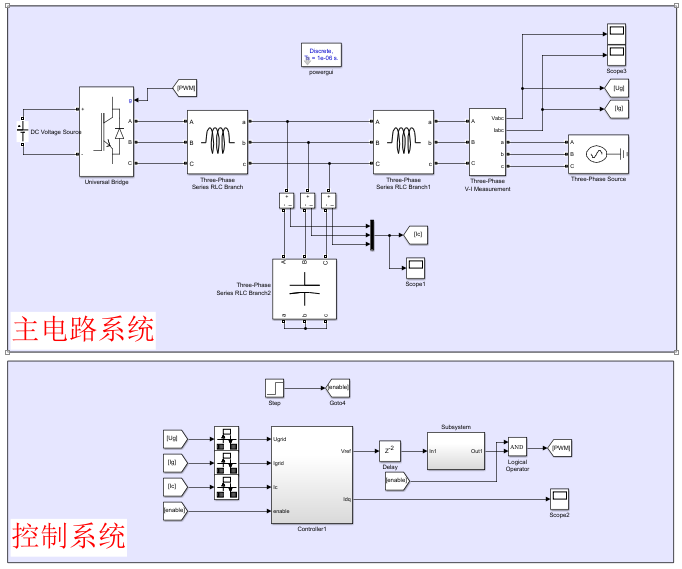
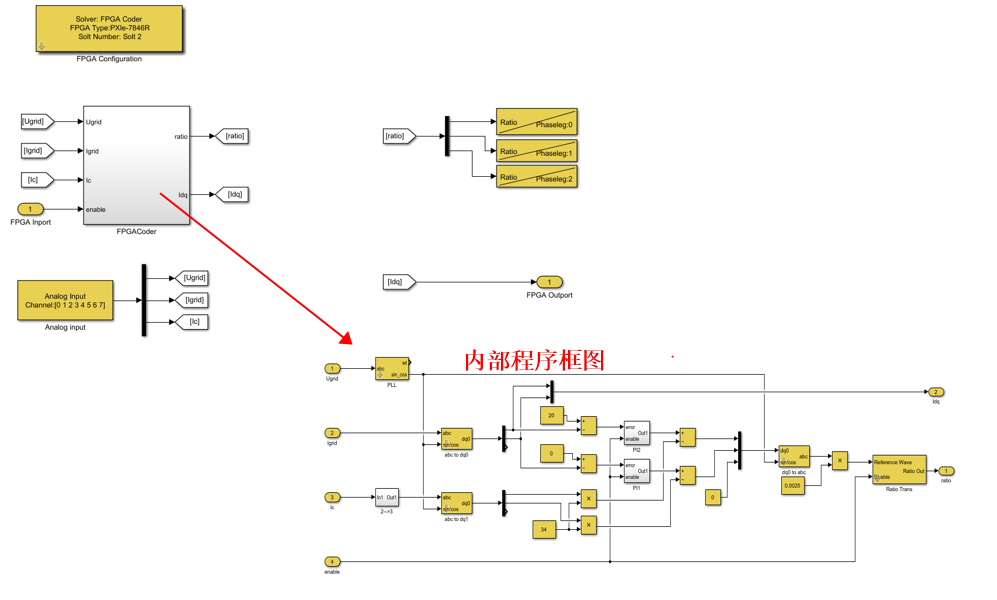
离线模型如下所示:
离线仿真结果:
如果不采用补偿算法,LC之间会发生振荡,而加入了补偿算法可以有效抑制振荡,保持系统的稳定性。为了更好的模拟实际情况,我们采用半实物仿真的方式来进行验证。
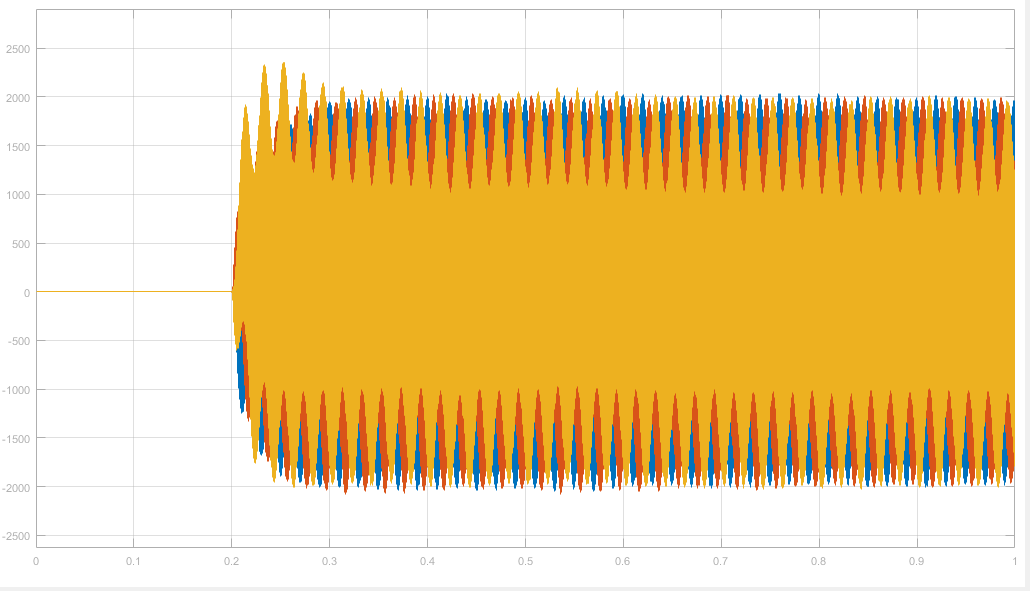
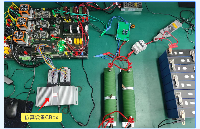
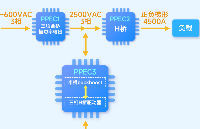
半实物仿真验证:
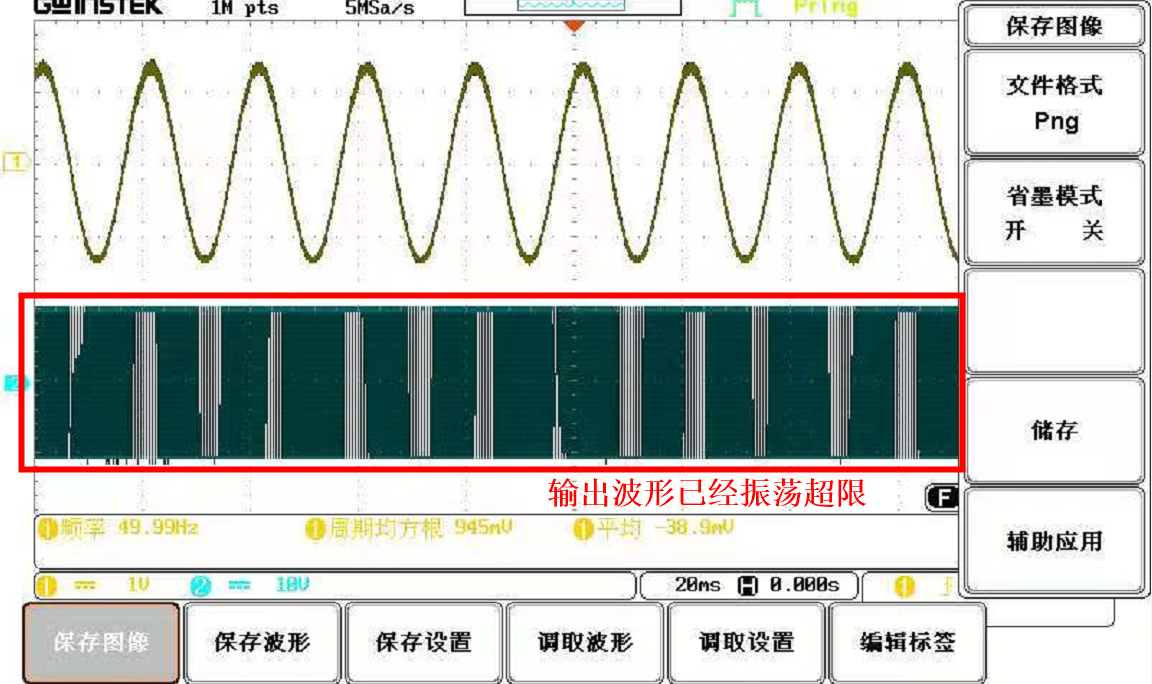
半实物仿真验证的时候,我们将主电路系统放入EasyGoNetBox电力电子仿真器中运行,仿真步长设置为1e-6,即1us实时仿真,将控制系统放入PXIBox中,控制模型运行在10k,即1e-4步长运行。结果发现,即使加入补偿算法,系统电流还是会振荡发散。
分析原因:
在真实系统中,实物控制器首先通过硬件采集,然后传到运算单元计算,最后输出结果来发出指令,整个过程会有一定的延迟。因为采用了补偿算法,所以可能会由于补偿的时延导致系统不稳定。
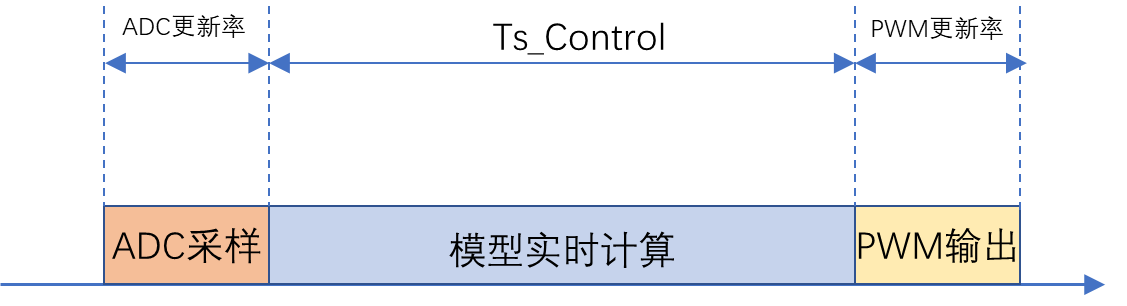
因为ADC的更新率,PWM更新率都非常快,一般只有几百ns,最多1-2us的延迟(具体根据实际PWM的更新率以及ADC的更新率可计算出),相对于模型实时计算的周期Ts_Control要小很多,所以大部分的实际系统的时延是由于控制器的控制周期带来的,考虑到以上几个部分存在并行同步的运行,所以时延可能会在1-2个Ts_Control。
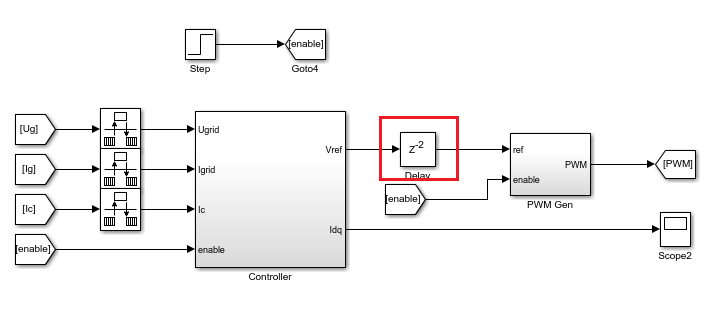
原因离线分析:
为了验证是否是因为时延导致算法运行不合理,我们在离线仿真程序中模拟实际控制系统的时延因素,时延选择为2个Ts_Control延迟。同时调整不同的控制周期并进行仿真对比:
- 控制速率200k,delay大约在1e-5s,kp=20,ki=100
- 控制速率50k,delay大约在4e-5s,kp=20,ki=100
- 控制速率20k,delay大约在1e-4s,kp=5,ki=40
控制速率20k,delay大约在1e-4s,kp=20,ki=100(调整PI,有助于改善波形,但是还是会振荡。)
- 10k,delay大约在2e-4s,kp=5,ki=40
初步结论:
对于此系统,确实过大的时延会带来影响,所以控制速率越快,实际系统的延迟越小,控制的稳定性越好。从离线仿真效果来看,要忽略时延带来的影响,需要控制速率至少要达到50k,甚至200k的控制速率,这种控制速率用传统的实时CPU运行方式是无法达到的。EasyGoFPGA Coder技术可以非常简单将模型运行在FPGA上,轻松完成200k的实时控制。
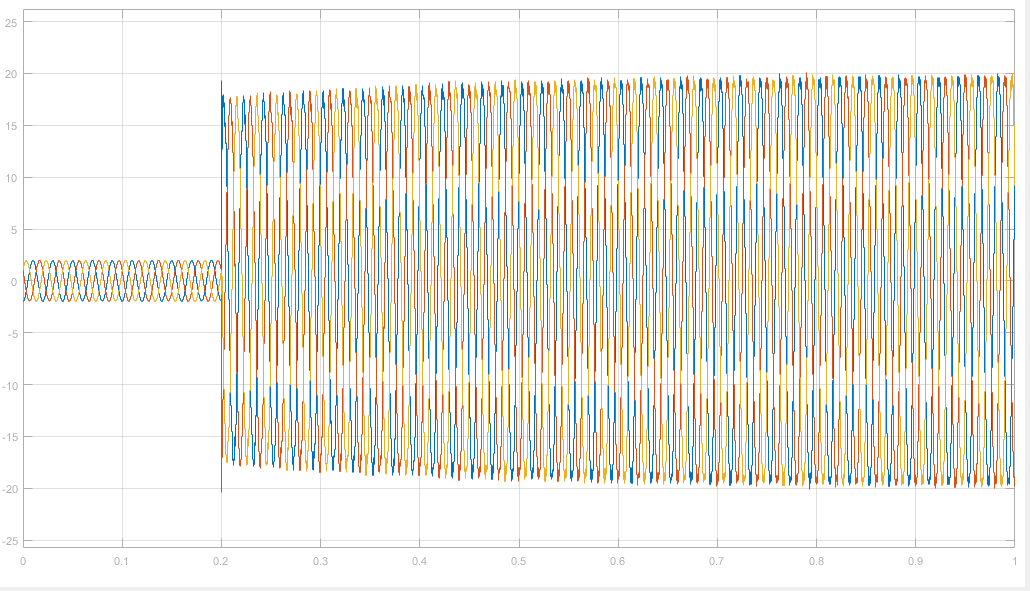
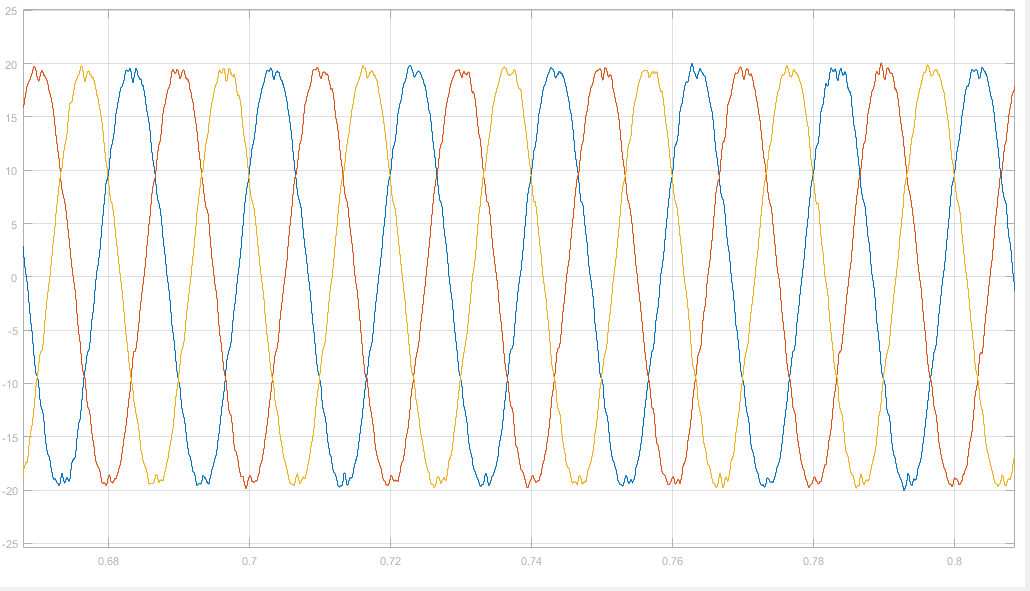
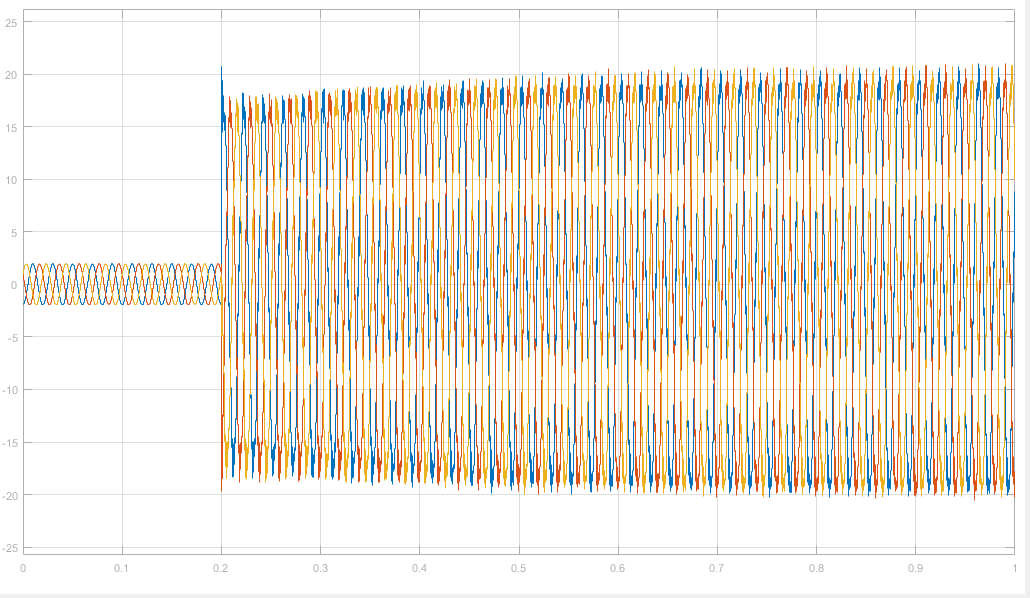
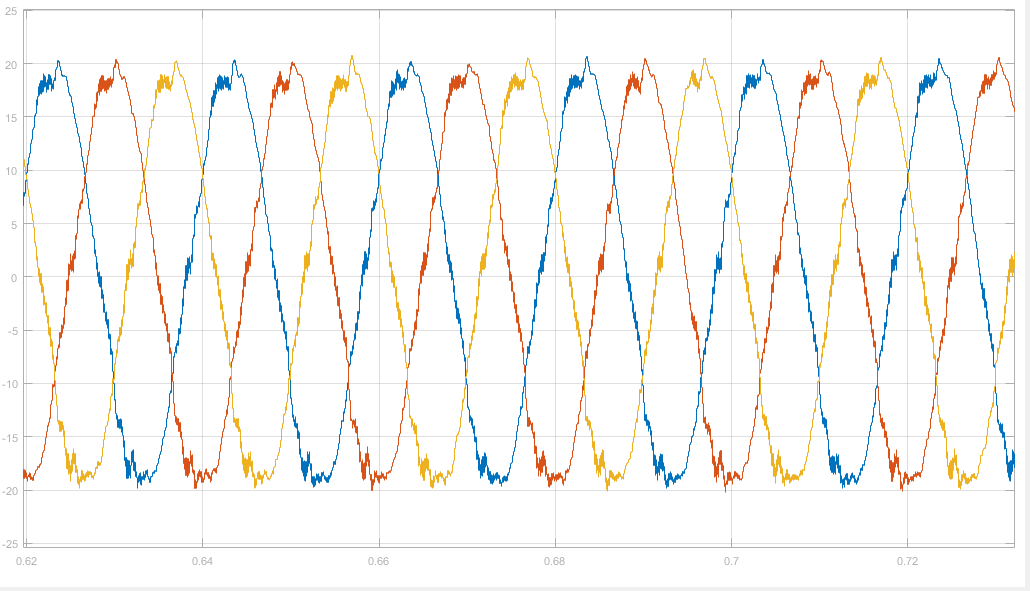
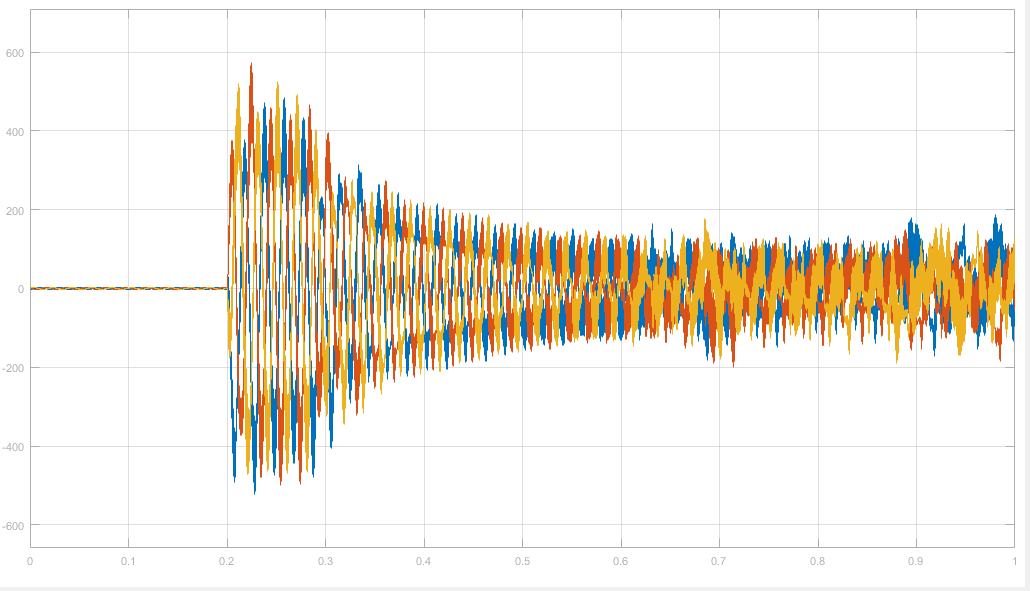
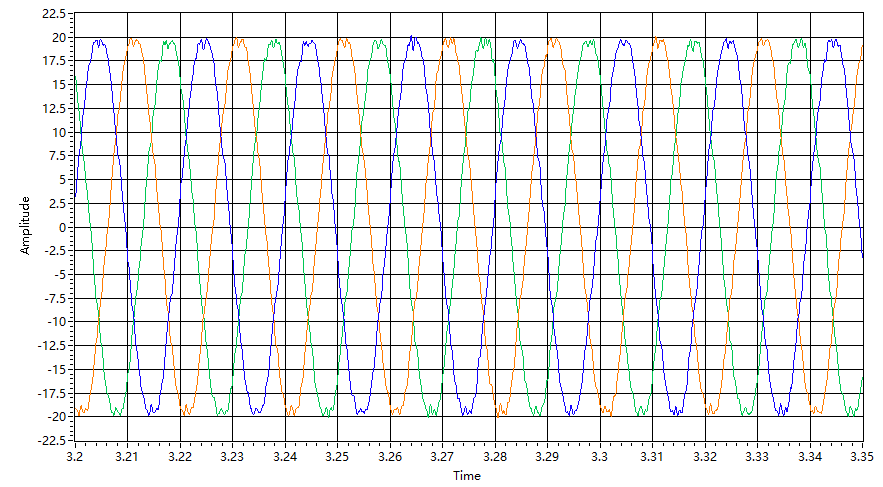
实际运行的结果如下(录波波形):
不加补偿算法:
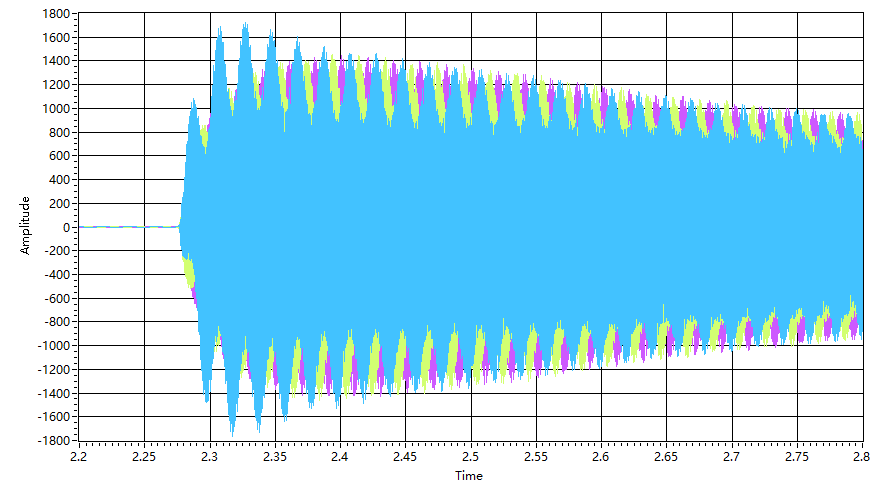
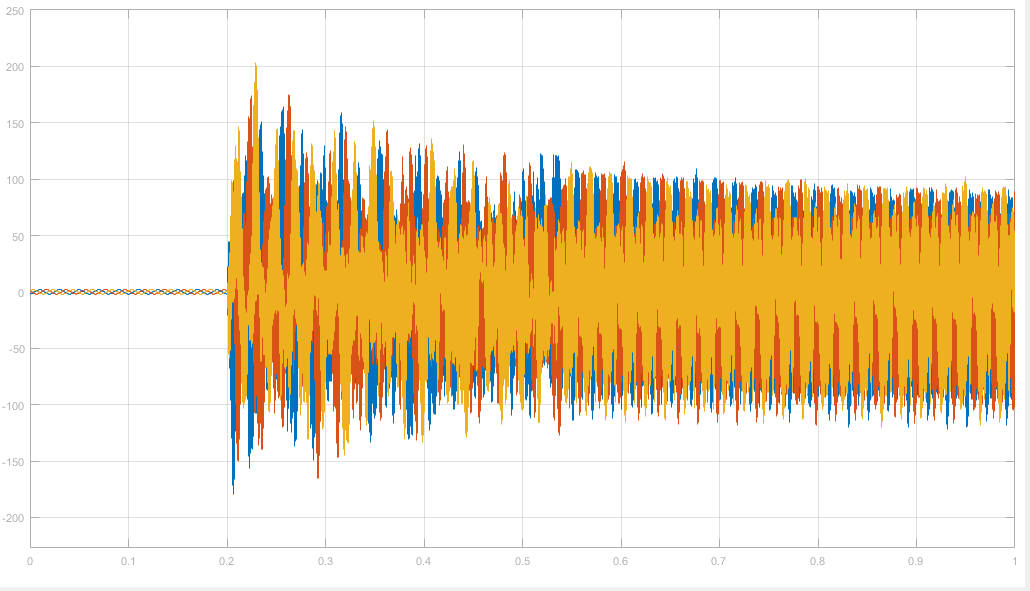
加补偿算法:
-
电力电子
+关注
关注
29文章
556浏览量
48834 -
硬件在环
+关注
关注
2文章
12浏览量
11828 -
实时仿真
+关注
关注
0文章
22浏览量
8649 -
半实物仿真
+关注
关注
0文章
5浏览量
7015
发布评论请先 登录
相关推荐
PPEC-HIL 三相整流逆变实时仿真测试
EasyGo实时仿真丨三相永磁同步电机开环实验仿真应用

三相逆变器输出电压与输入电压关系
EasyGo实时仿真丨飞轮储能系统硬件在环仿真测试






 工商网监
工商网监
评论