 3D相机选型指南
3D相机选型指南
一、前言
3D相机的应用在我们身边已是越来越常见。在工业场景中,如自动化工厂的抓取上下料、焊接打磨切割、生产过程中产品检测、拆码垛等应用。而在消费端,人们常见的无人售货机的刷脸支付,小区学校高铁站等布置的人脸识别门禁,牙科里牙齿的模型扫描,医美行业面部美容前后的三维重建等。可见,3D相机的选型在视觉项目开发与部署中占据着举足轻重的地位。
 3D相机应用
3D相机应用如何更好的选择一款合适的3D相机,首先我们需要认识3D相机的主要原理有哪些,不同工作原理的优劣势是怎样的,不同厂商3D相机的主要特征、重要参数是怎样的。只有对这些内容进行深入的了解,才能为项目挑选到合适的3D相机,加速项目落地。
二、3D相机的主要成像原理及其优劣势
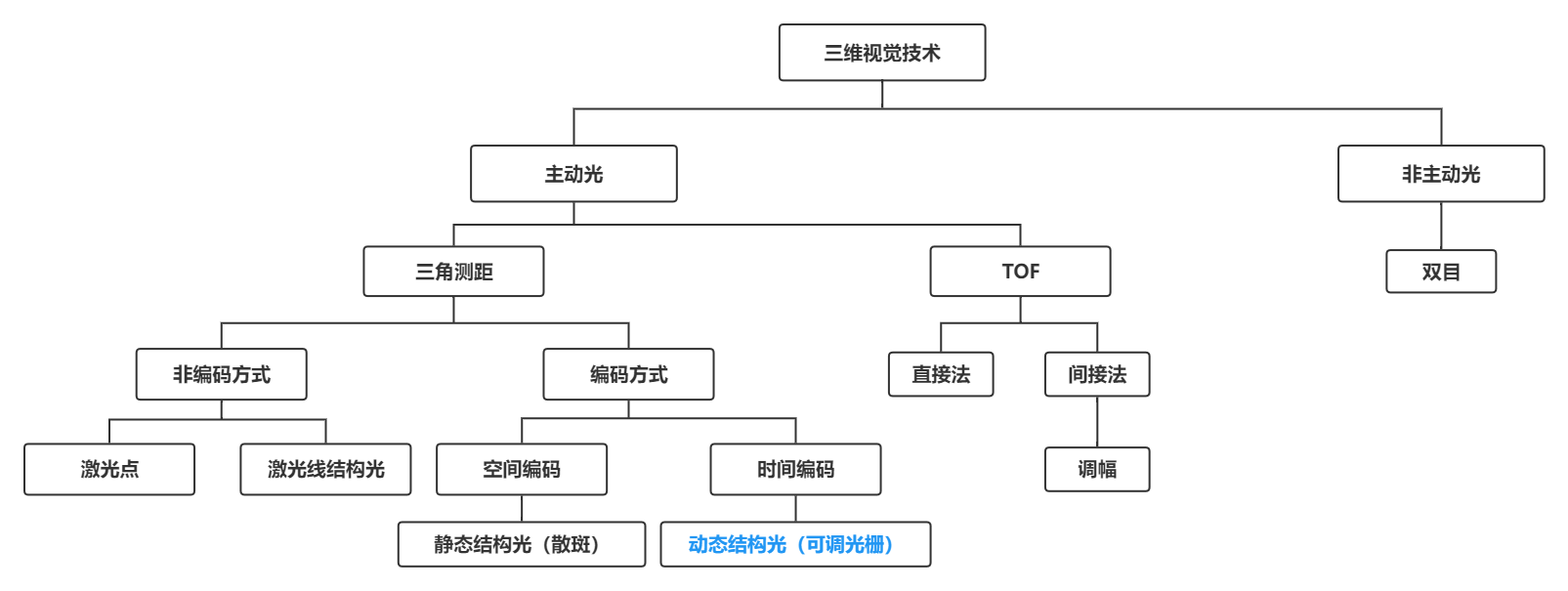 三维成像技术
三维成像技术2.1主流3D成像方案原理
2.1.1双目视觉原理:
双目立体视觉由三角法原理进行三维信息的获取,即由两个摄像机的图像平面与被测物体之间构成一个三角形。已知两个摄像机之间的位置关系和物体在左右图像中的坐标,便可以解算出两摄像机公共视场内物体的空间位置信息。所以,双目视觉系统一般由两个摄像机构成。其原理图如下所示:
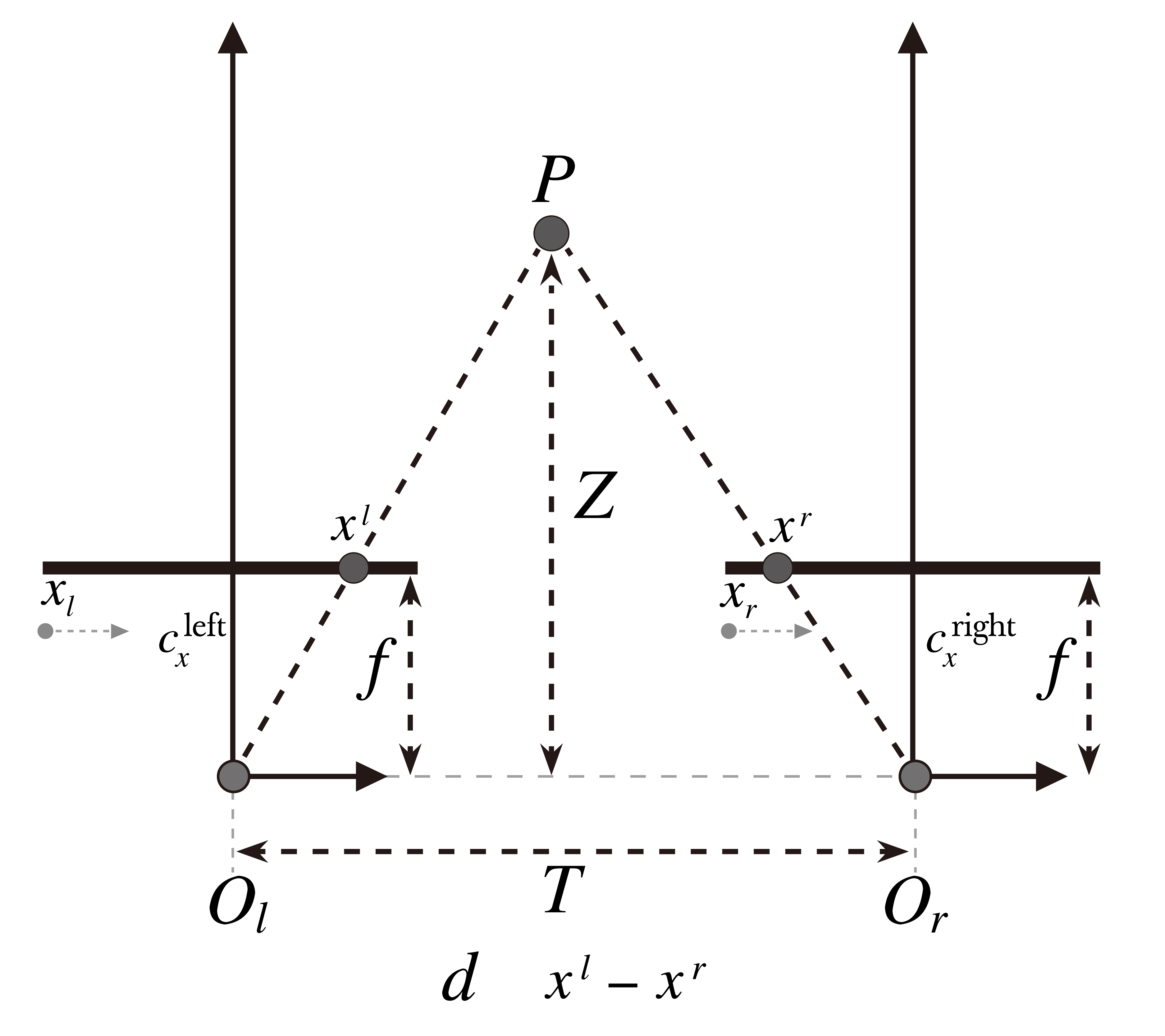 双目视觉成像原理图
双目视觉成像原理图根据相似三角形得到以下等式进而推算出Z:

2.1.2激光三角测量原理
如下图所示,激光头与摄像头在同一水平线(称为基准线)上,其距离为s,摄像头焦距为f,激光头与基准线的夹角为β。假设目标物体在点状激光器的照射下,反射回摄像头成像平面的位置为点P。
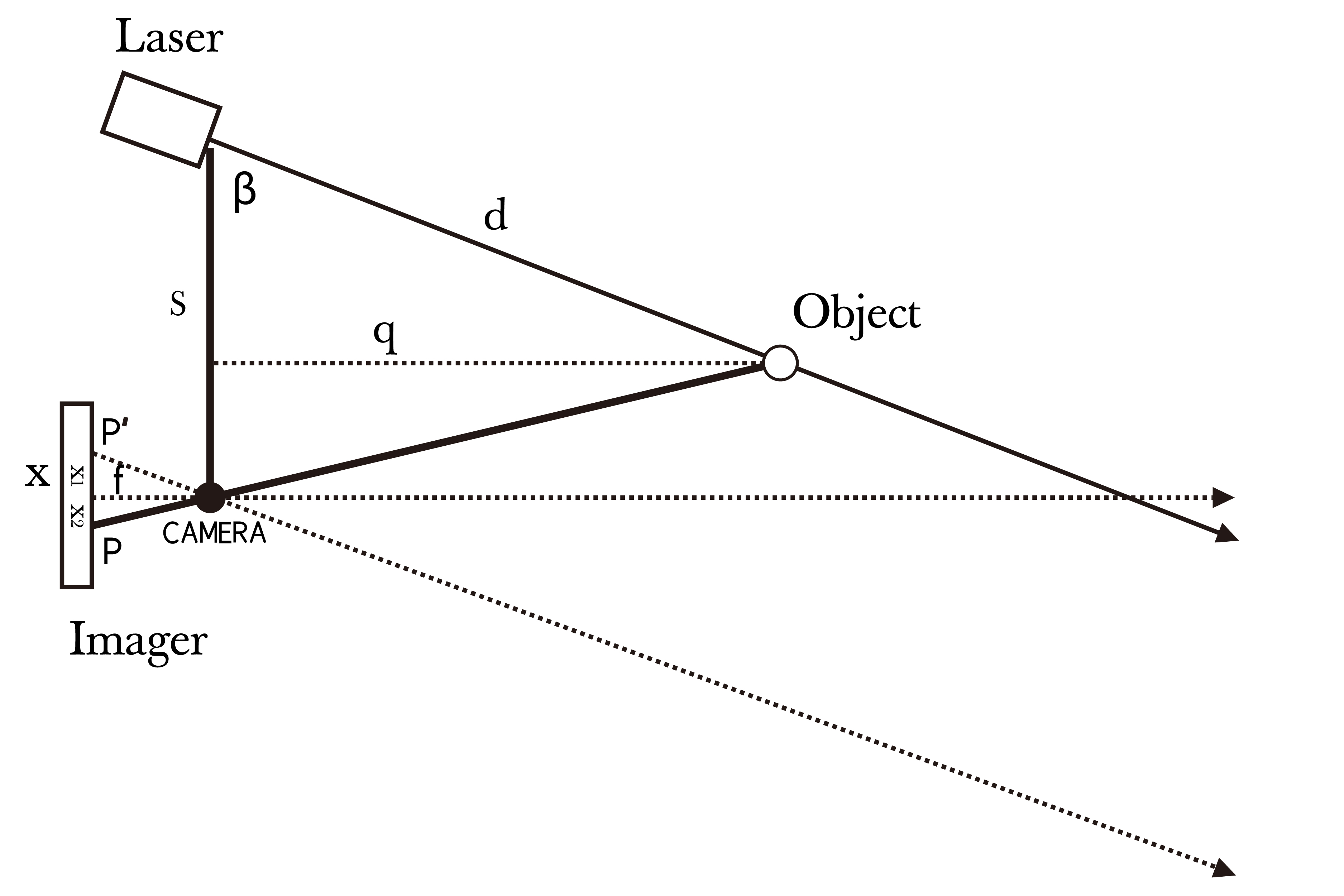 激光三角测量原理
激光三角测量原理由几何知识相似三角形可得:f/x=q/s ==> q=fs/x。
2.1.3结构光3D成像原理:
结构光法属于主动式测量,通过投射器将编制好的编码结构光投射到物体表面,编码结构光经过物体表面高度的调制后产生扭曲并被摄像机接收,通过后期图像处理和解码完成像素点匹配,最后基于三角测量原理实现物体的三维重建。
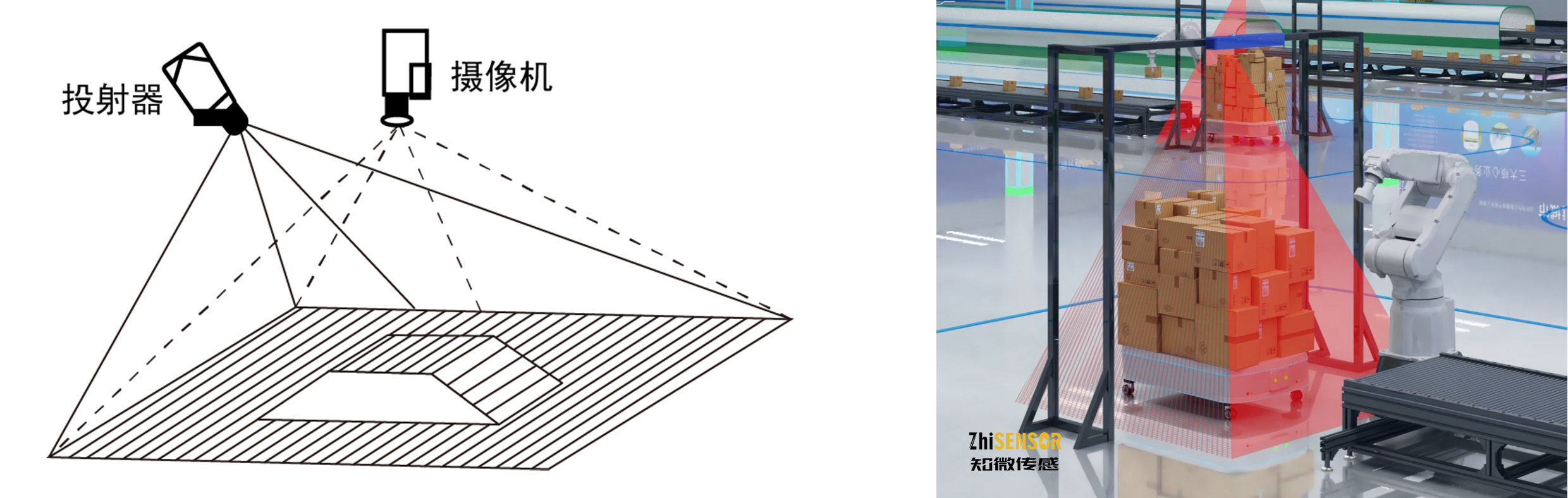 结构光3D成像
结构光3D成像2.1.4 TOF(Time Of Flight)成像原理
TOF是通过连续或脉冲波打在物体表面,再通过传感器接收返回的光,通过测量波的飞行时间测得物体的距离,根据调制方法的不同,一般可以分为两种:脉冲调制(Pulsed Modulation)和连续波调制(Continuous Wave Modulation)。
脉冲调制:脉冲调制方案的原理比较简单,如下图所示。它直接根据脉冲发射和接收的时间差来测算距离。
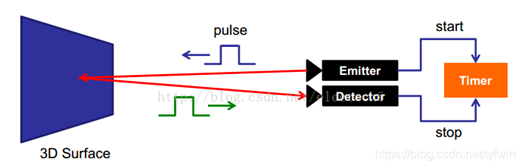 脉冲调制
脉冲调制连续波调制:实际应用中,通常采用的是正弦波调制。由于接收端和发射端正弦波的相位偏移和物体距离摄像头的距离成正比,因此可以利用相位偏移来测量距离。
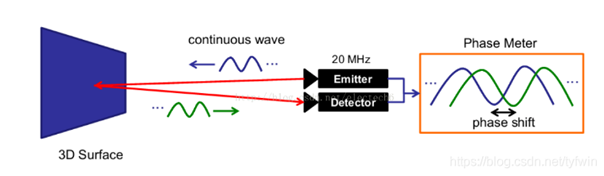 连续波调制
连续波调制2.2主流成像方案优劣势简述
在光源的依赖性上:基于主动光技术的三维成像,其成像时内部自带光源,不依赖外部环境光,而非主动光技术的双目方案,其成像则依靠外界光,无法适应昏暗的应用场景。
在成像质量与精度上:线激光结构光方案(丝级)>条纹光栅结构方案(亚毫米级)>散斑结构光方案(毫米级)>TOF方案(厘米级);
在成像速度上:TOF方案>散斑结构光方案>条纹光栅结构光方案>线激光结构光方案。
三、3D相机选型需关注的典型指标
3.1 3D相机分辨率与像元
分辨率作为相机的基本参数之一,是指传感器(CCD或CMOS)芯片靶面排列的像元数量。
面阵相机的分辨率用水平和垂直分辨率表示,如:1280(宽)× 1024(高);线阵相机的分辨率通常表示为K,如1K(1024),表示一行由1024个像元。在对同样大的物体成像时,分辨率越高,能够显示更多细节。
3.2 3D相机的帧率及成像时间
成像时间,一般约定为成像的延时,包含:投射+拍摄+点云计算+数据传输的过程的耗时;
3.3 3D相机的FOV
以单目结构光相机为例,其有效的视场范围为其结构光投射器的视场与其镜头成像视场的重叠区域为有效区域。如下图红色区域为有效视场范围:
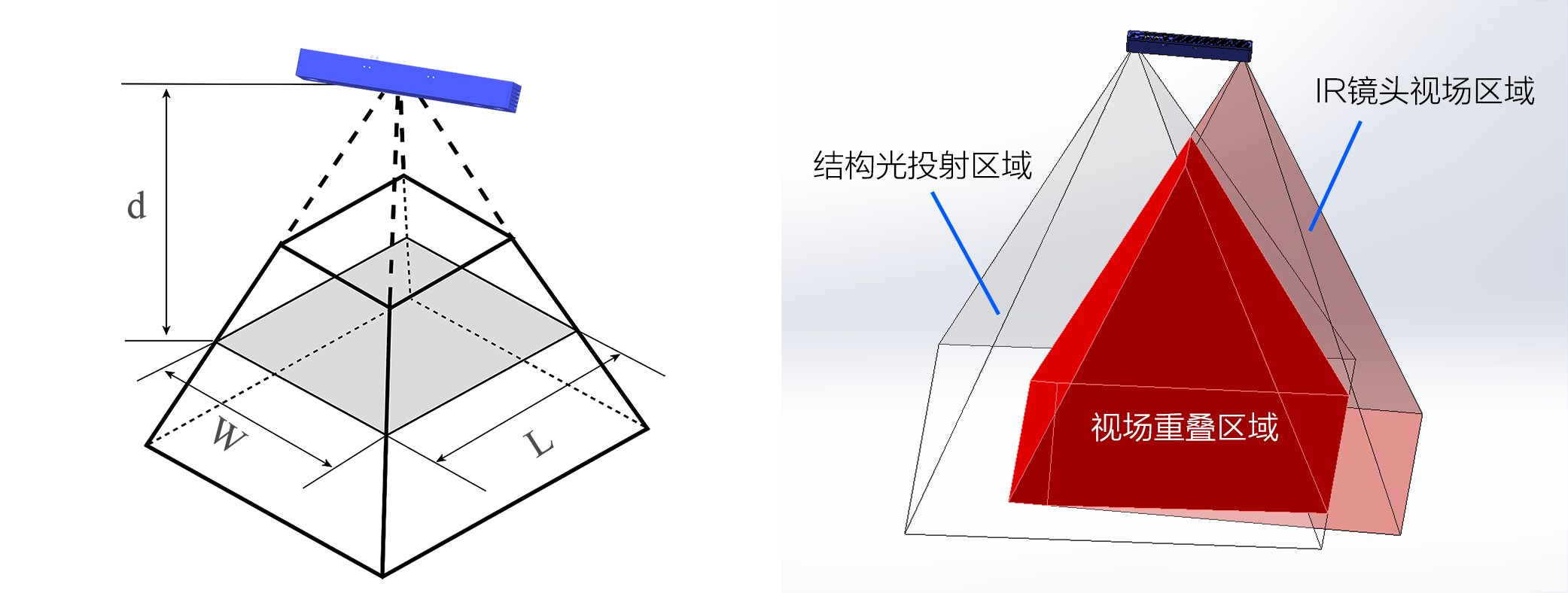 3D相机FOV示意
3D相机FOV示意3.4 3D相机的工作距离和景深
工作距离指3D相机的最近端的拍摄离被测物表面的距离及最远的距离的区间,景深是指最近端和最远端的工作距离的差值;
对于景深的选择,以普通的深框抓取为例,定义料框大小为长宽高=500mm*500mm*1000mm,其W和H方向的点云需要覆盖700mm*500mm,咱们在选型的时候需要确定其能满足这个视野时相机的工作距离,同时,在该距离下再加上料框的高度即为相机实际需要架高的高度,料框的高度即为我们选型相机时需要的景深。在大景深相机的选择上,以MEMS振镜为投射核心元器件的3D相机具有较大景深的特点,其景深最大可达2米,可满足大型拆码垛等应用场景。
3.5 3D相机的精度
精度测量有多个方面:①重复精度:多次测量的重复测量结果的误差;②.相对平面度:取平面上的数十万个点云,拟合平面计算RMS值;
在精度的选型上,需要跟据场景需要的精度指标来进行合理选择,如TOF目前可达厘米级,散斑结构光达毫米级,以MEMS振镜为核心投射元器件的条纹结构光则可达亚毫米级;
3.6 3D相机的体积和重量
取决于相机的安装方式,及选用机械臂的负载,如果相机放在机械臂末端的话,需要考虑到机械臂的负载大小来对相机的重量选型,根据现场是否存在干涉来考虑对相机体积选型;
知微传感目前已发布的3D相机均采用以MEMS振镜投射器投射结构光,其MEMS振镜投射器体积与重量与DLP光机相比,具有显著的优势;
 MEMS振镜投射器与DLP光机
MEMS振镜投射器与DLP光机3.7触发信号
相机分为软触发和硬触发两种模式,软触发是通过调用厂商提供的软件SDK接口来触发相机进行拍照;硬触发是以外部信号源触发相机进行拍照,硬触发多为IO触发:需给上升沿或者下降沿(数字电平从低电平(数字“0”)变为高电平(数字“1”)的那一瞬间(时刻)叫作上升沿。)
四、小结
没有最好的3D相机,只有最适合应用场景的3D相机,我们要根据现场的应用场景需要覆盖的视野、需要的节拍,对应的精度等综合选择相机;
3D相机哪家品牌好呢?小编给大家推荐一家国内自主研发的品牌——知微传感(Zhisensor)。
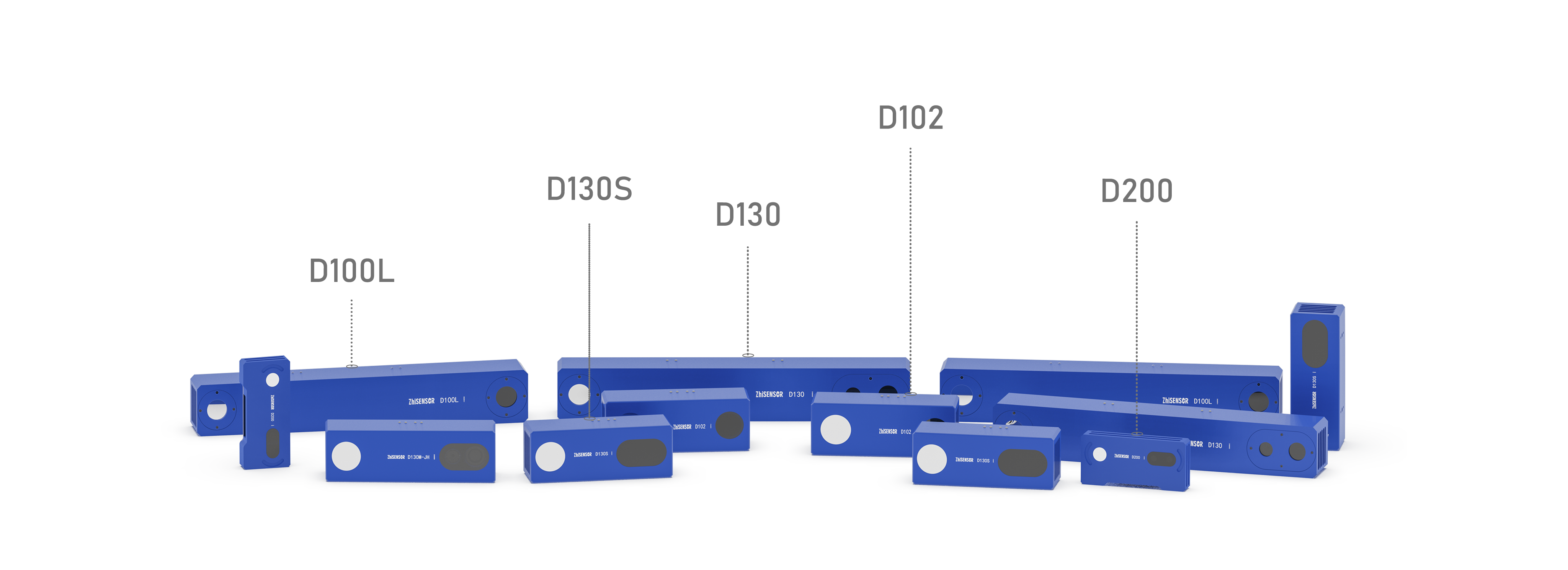 知微传感Dkam系列3D相机
知微传感Dkam系列3D相机知微传感为国内知名的3D相机硬件提供商,其研制的3D相机采用自主研发的MEMS振镜为投射核心元器件,结合红外激光光源,实现光栅动态结构光投射,再利用三角测距法获知被测物的三维信息。该系列产品具有精度高,体积小,重量轻,性价比高等优势,目前已广泛应用在上下料,无序分拣,拆码垛,切割焊接打磨等领域。
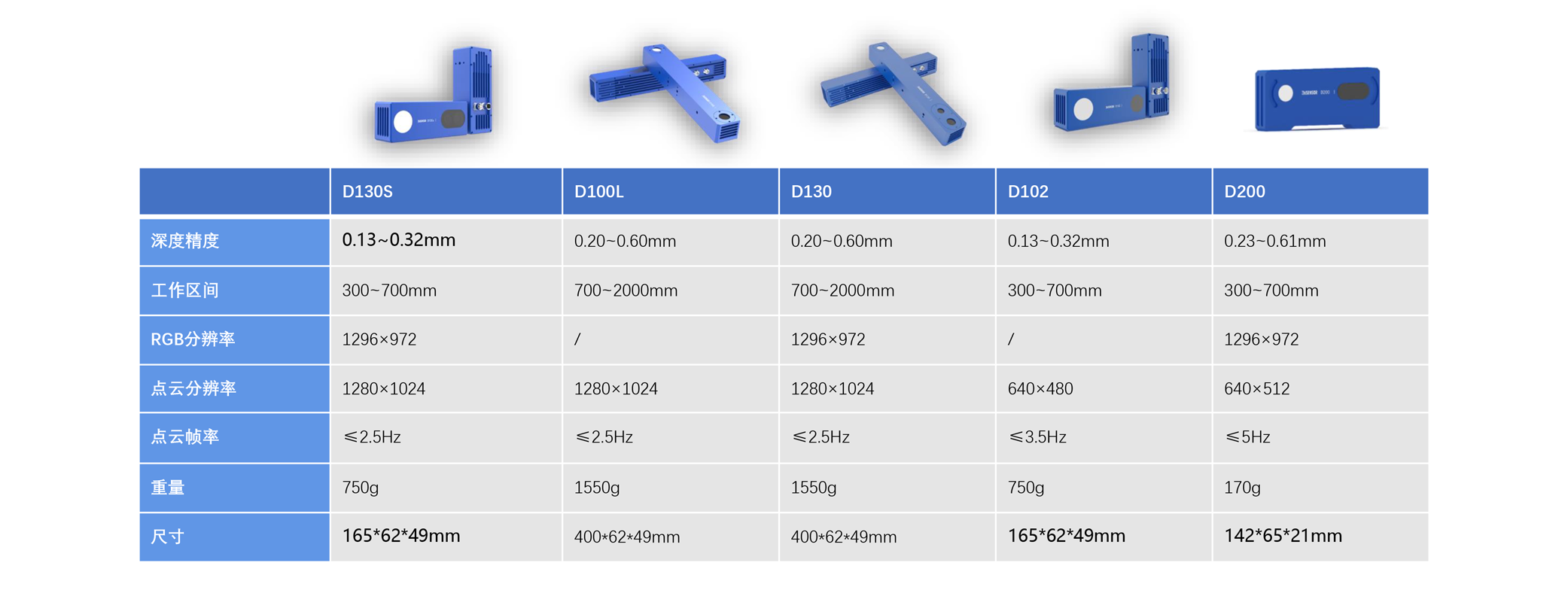 Dkam系列3D相机基本参数
Dkam系列3D相机基本参数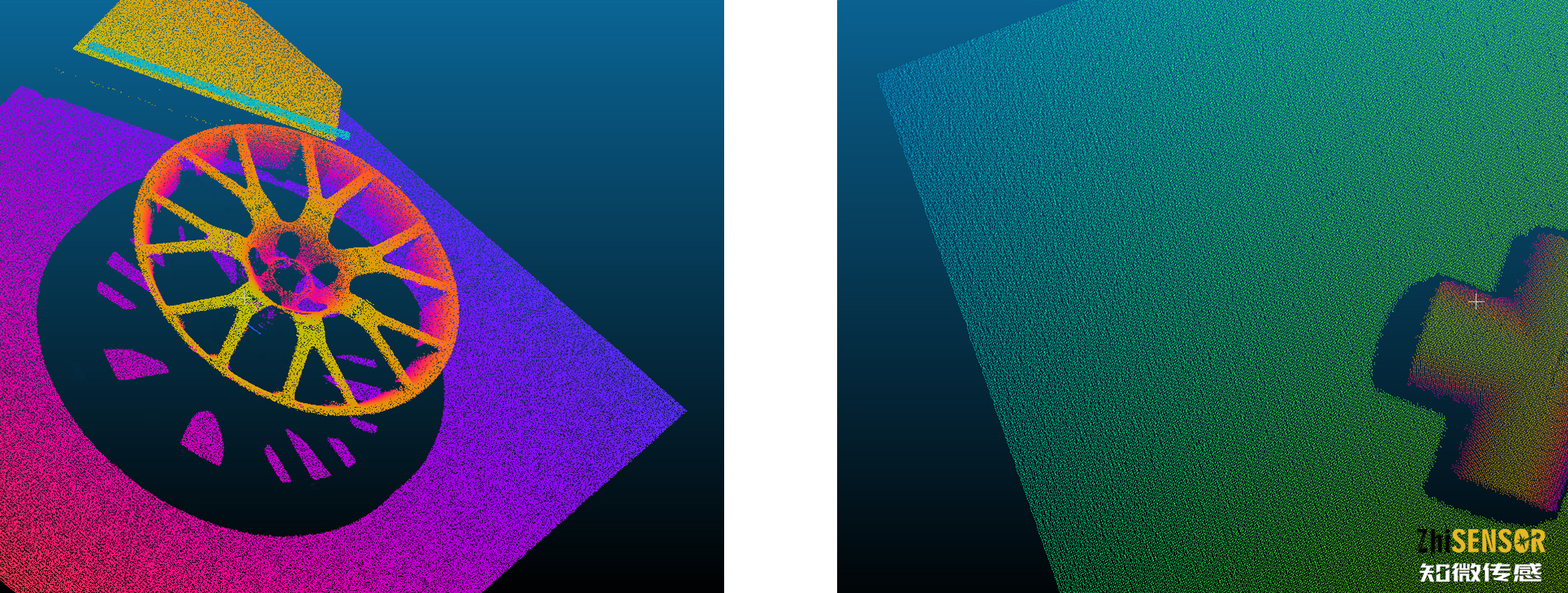 Dkam系列3D相机点云成像
Dkam系列3D相机点云成像免责声明:上面部分资料和图片来自网络或学术期刊,如有侵权,请及时联系作者,我们会第一时间处理。
-
机器视觉
+关注
关注
163文章
4437浏览量
121151 -
3D视觉
+关注
关注
4文章
442浏览量
27741
发布评论请先 登录
相关推荐
SciChart 3D for WPF图表库
物联网行业中的模具定制方案_3D打印材料选型分享
技术指南丨深视智能3D相机上下对射测厚操作流程


裸眼3D笔记本电脑——先进的光场裸眼3D技术
奥比中光3D相机打造高质量、低成本的3D动作捕捉与3D动画内容生成方案
OpenCV携奥比中光3D相机亮相CVPR 2024

AGV导航精度怎么更准确?利用3D相机打造更智能的AGV辅助系统
奥比中光正式发布全新Gemini 330系列双目3D相机

奥比中光携多款3D相机深度参与国内3D视觉最高规格会议

Stability AI推出Stable Video 3D模型,可制作多视角3D视频





 工商网监
工商网监
评论