 永磁同步电机运作
永磁同步电机运作
主要对于装载在大众E-Golf使用的三相永磁同步电机/充电机(MG)进行其运作进行研究探讨,沿着典型的运作原理及电路特性提出一些问题,我想分享和讨论这些问题这些问题与研究结果。在我们开始进行之前,请记住安全、认证、训练及系统知识都是缺一不可的,因为以下内容包含包含活电工作。关于系统知识,以下自学课程(SSP-530 & SSP-527)是VAG对于装载在E-Golf上的高电压系统运行原理提供珍贵见解的说明。 备注: SSPs无法替代EV培训
让我从我所量测的电路概述开始。以下之波型截图表示我们的E-Golf从静止状态加速并由第三级的剎车动能回充减速(可供驾驶者选择)达到停止。也就是说车辆能够减速是藉由转子承受负载导致,此时转子为充电机的作用。(转子经传动系统与车轮连接)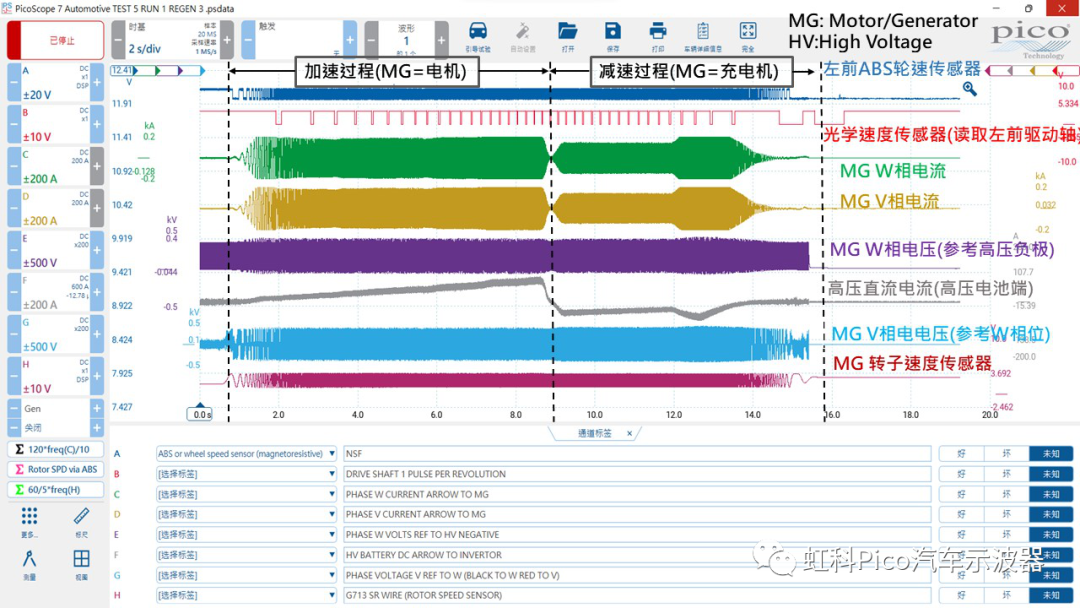 在以上的测试期间,我们有一个关于MG状态切换的问题: 我们如何从捕获到的数据判断MG何时为电机或充电机运行状态?我想最简单的答案就在通道F捕获到的高压电池直流电流波型。我们精确捕获了高压电池电流从正值(为电机供电)变为负值(MG转为充电机回充电流)的转折点。(见下文)
在以上的测试期间,我们有一个关于MG状态切换的问题: 我们如何从捕获到的数据判断MG何时为电机或充电机运行状态?我想最简单的答案就在通道F捕获到的高压电池直流电流波型。我们精确捕获了高压电池电流从正值(为电机供电)变为负值(MG转为充电机回充电流)的转折点。(见下文)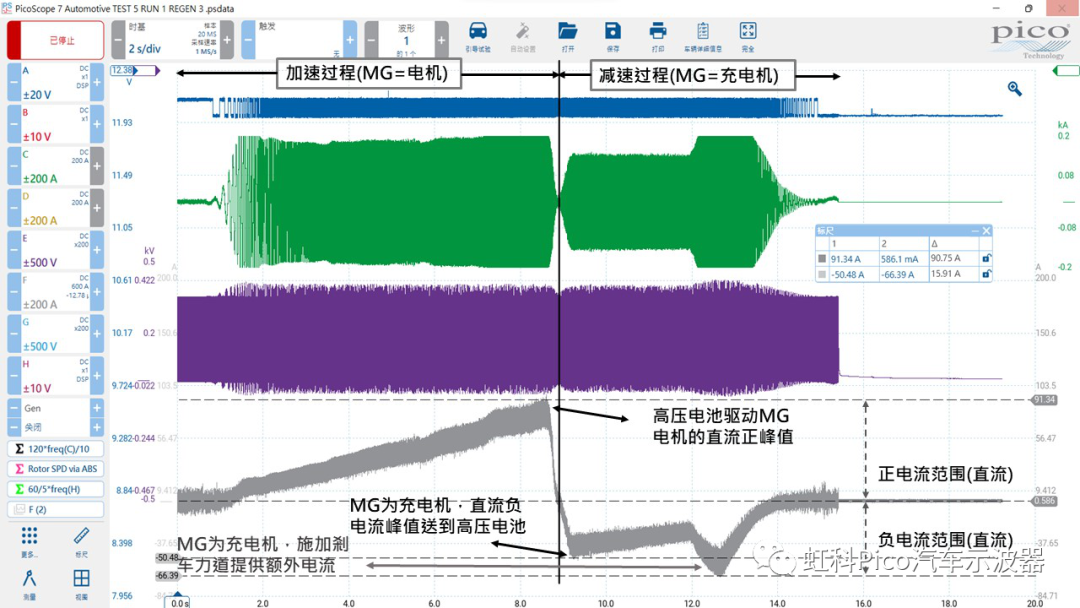 注意高压电池直流正电流的峰值大约位置。上方截图画面显示+91A。这用来提供电机马达电力并驱动车辆。而在减速期间,由于MG此时为充电机,电流是相反过来的,导致负峰值电流大约在-50A。在波型纪录中约12.5秒时,另一个额外的-16A电流被传输到高压电池(总共-66.85A),这是由于剎车踏板的踩踏进一步降低转子速度并产生额外的充电电流。小提示:注意通道F的信号测量标尺为4个而不是2个!为了在一个波型上使用4个信号测量标尺,你必须建立一个自动隐藏在你欲量测波型后方的参考波型。复制波型的好处是额外有2个标尺可供同一波型进行多重测量。有关参考波形的更多信息,我建议您参阅下方视频。
注意高压电池直流正电流的峰值大约位置。上方截图画面显示+91A。这用来提供电机马达电力并驱动车辆。而在减速期间,由于MG此时为充电机,电流是相反过来的,导致负峰值电流大约在-50A。在波型纪录中约12.5秒时,另一个额外的-16A电流被传输到高压电池(总共-66.85A),这是由于剎车踏板的踩踏进一步降低转子速度并产生额外的充电电流。小提示:注意通道F的信号测量标尺为4个而不是2个!为了在一个波型上使用4个信号测量标尺,你必须建立一个自动隐藏在你欲量测波型后方的参考波型。复制波型的好处是额外有2个标尺可供同一波型进行多重测量。有关参考波形的更多信息,我建议您参阅下方视频。
为了了解MG作为充电机时的性能,可以从上方PicoScope的数据数据和下面的理论更深入探讨三相永磁同步电机的运作特性。 关于三相无刷直流电机的讨论(为了有更好的概述),可点击文章末尾“阅读原文”了解,这正是我们在车辆中也有的问题讨论。 与其我试图解释三相无刷直流电机的功能,不如看看下面的精彩动画。请注意,在动画中,转子位于定子外侧。 而 EV 应用中,转子放置在定子内部并最终与车轮连接。
总结以上动画中描述的运行,我们的 MG 定子中会产生一个旋转磁场 (RMF),简称为”电子换向”或“EC”。 RMF 的速度藉由 PWM 控制信号的多个功率晶体管精确控制开关。高压直流电流的精确开关控制(PWM控制)也造成了三相高压交流电流之产生。以下视频更详细地介绍直流到交流的转换原理。
藉由使用下图中通道 E 的正占空比波型,我们可以看到我们其中一个 MG 相位(W 相位)的高压如何被控制用以产生交流电流的。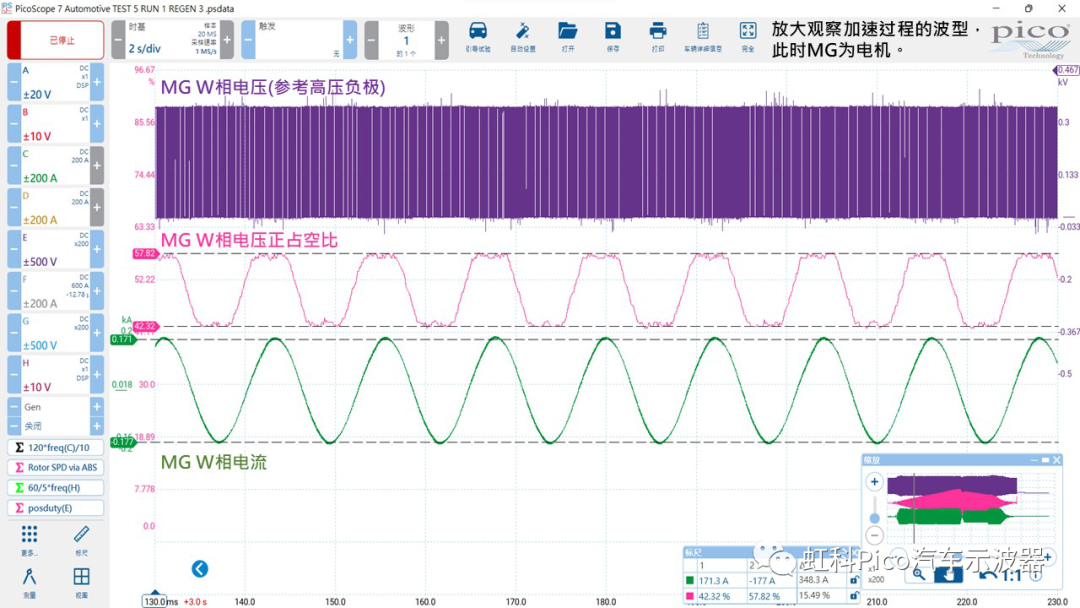 请注意,以上的数学通道“posduty(E)”显示了 MG W 相电压的峰值正占空比控制(约 58%)对应到流经相位绕组的峰值正电流(约 171 A)。同样,我们较低的正占空比(42%)对应到我们的峰值负电流 -177 A 相近。请注意,下面屏幕截图中的正占空比数学通道也显示了电压如何领先超前于电流(约 470 µs),这是典型的电感特征,并凸显了线圈(W 相)由于感抗产生而与交流电流相反的固有特性。
请注意,以上的数学通道“posduty(E)”显示了 MG W 相电压的峰值正占空比控制(约 58%)对应到流经相位绕组的峰值正电流(约 171 A)。同样,我们较低的正占空比(42%)对应到我们的峰值负电流 -177 A 相近。请注意,下面屏幕截图中的正占空比数学通道也显示了电压如何领先超前于电流(约 470 µs),这是典型的电感特征,并凸显了线圈(W 相)由于感抗产生而与交流电流相反的固有特性。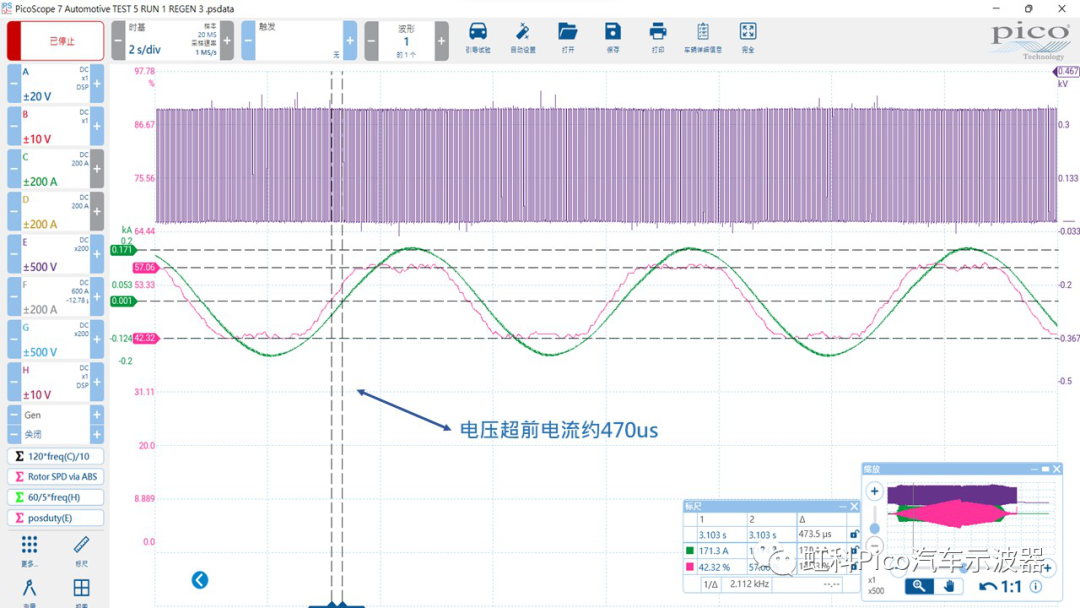 现在我们有了 RMF(其转速称为同步速度),我们现在可以藉由定子的感应磁场与永磁转子的交互作用来作用启动转子的旋转。若要再次参阅请点及上方动画视频。同步电机内的转子之理论速度应该与定子的RMF完全相同。(毕竟这是一台同步电机) 我们可以使用数学和下面的公式来证明这个理论,并发现关于 MG 状态的线索。它是根据转子速度决定担任电动机还是担任充电机吗? 那我们该如何计算RMF及转子速度?让我们从RMF速度计算开始。我们可以使用以下公式: 120*Freq(C) / Number of poles120代表我们的三相中每个相位相距的角度(120°)Frequency (C)代表通过相位的交流电流的频率。Number of poles代表磁铁的数量X2以得出极数(每一个磁铁都有北极与南极)再次参阅我们的SSPs后,它表示转子有5对磁组(10个磁极),我认为定子也是如此!在下方画面我们使用数学通道“120*freq(C)/10”来显示出我们的RMF速度(同步速度)。
现在我们有了 RMF(其转速称为同步速度),我们现在可以藉由定子的感应磁场与永磁转子的交互作用来作用启动转子的旋转。若要再次参阅请点及上方动画视频。同步电机内的转子之理论速度应该与定子的RMF完全相同。(毕竟这是一台同步电机) 我们可以使用数学和下面的公式来证明这个理论,并发现关于 MG 状态的线索。它是根据转子速度决定担任电动机还是担任充电机吗? 那我们该如何计算RMF及转子速度?让我们从RMF速度计算开始。我们可以使用以下公式: 120*Freq(C) / Number of poles120代表我们的三相中每个相位相距的角度(120°)Frequency (C)代表通过相位的交流电流的频率。Number of poles代表磁铁的数量X2以得出极数(每一个磁铁都有北极与南极)再次参阅我们的SSPs后,它表示转子有5对磁组(10个磁极),我认为定子也是如此!在下方画面我们使用数学通道“120*freq(C)/10”来显示出我们的RMF速度(同步速度)。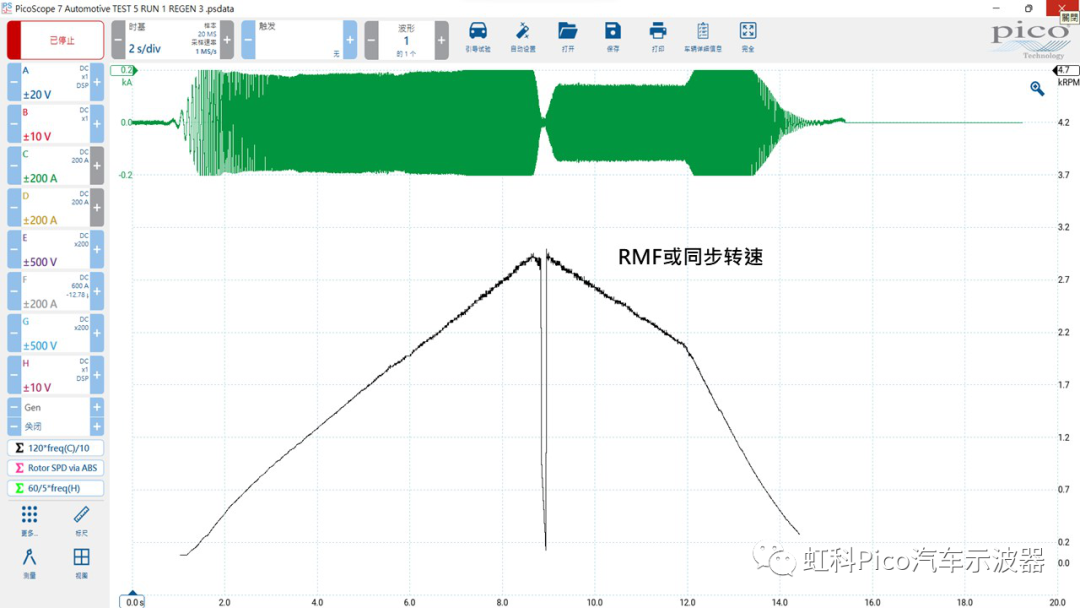 我们有几种选择来定义转子速度,而我一开始选择用轮速乘上传动比。这就是我们的光学拾取器(通道B上)瞄准到左驱动轴的一块反光带之处,它会在车轮每转一圈时产生一个脉冲。为了提高分辨率与精准率,我在通道A增加了左驱动轮的轮速传感器信号。藉由使用来自驱动轮的单一脉冲,我们现在可以计算轮速传感器相对于车轮转动一圈的脉冲数,我们以前使用过这种技术,您可以在此(https://www.picoauto.com/library/case-studies/subaru-with-incorrect-abs-operation)阅读有关它的信息。
我们有几种选择来定义转子速度,而我一开始选择用轮速乘上传动比。这就是我们的光学拾取器(通道B上)瞄准到左驱动轴的一块反光带之处,它会在车轮每转一圈时产生一个脉冲。为了提高分辨率与精准率,我在通道A增加了左驱动轮的轮速传感器信号。藉由使用来自驱动轮的单一脉冲,我们现在可以计算轮速传感器相对于车轮转动一圈的脉冲数,我们以前使用过这种技术,您可以在此(https://www.picoauto.com/library/case-studies/subaru-with-incorrect-abs-operation)阅读有关它的信息。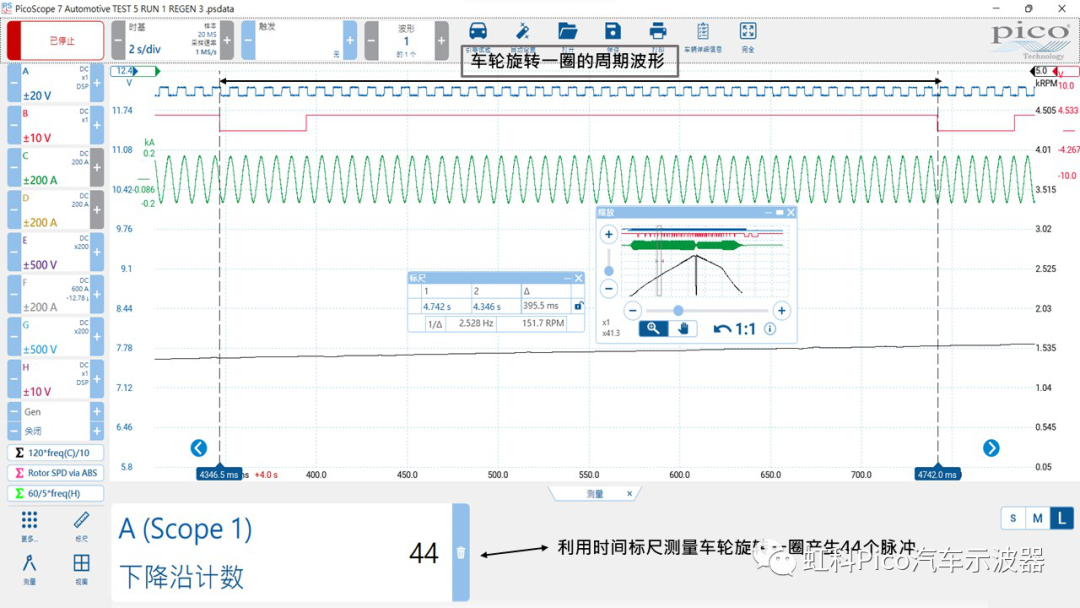 藉由使用PicoScope 7 Automotive中的“下降边缘计数”测量功能(在上方画面截图中的时间标尺之间),我们可以结论ABS轮速传感器在每圈旋转时拾取44个脉冲。因为我们知道E-Golf的传动系统包含2.704:1的单齿轮比与3.608的最终传动比,我们统计全部的齿轮比等于2.704 x 3.608 = 9.756 :1我们现在可以藉由以下数学通道计算转子转速: (60/44*freq(A)/60)*9.756*6060/44*freq(A)表示轮胎的RPM,因为轮速传感器在每一转有44个脉冲。/60代表将RPM转换成频率(Hz)*9.756 代表透过传动比回算转子的频率*60 代表将转子频率转换成RPM
藉由使用PicoScope 7 Automotive中的“下降边缘计数”测量功能(在上方画面截图中的时间标尺之间),我们可以结论ABS轮速传感器在每圈旋转时拾取44个脉冲。因为我们知道E-Golf的传动系统包含2.704:1的单齿轮比与3.608的最终传动比,我们统计全部的齿轮比等于2.704 x 3.608 = 9.756 :1我们现在可以藉由以下数学通道计算转子转速: (60/44*freq(A)/60)*9.756*6060/44*freq(A)表示轮胎的RPM,因为轮速传感器在每一转有44个脉冲。/60代表将RPM转换成频率(Hz)*9.756 代表透过传动比回算转子的频率*60 代表将转子频率转换成RPM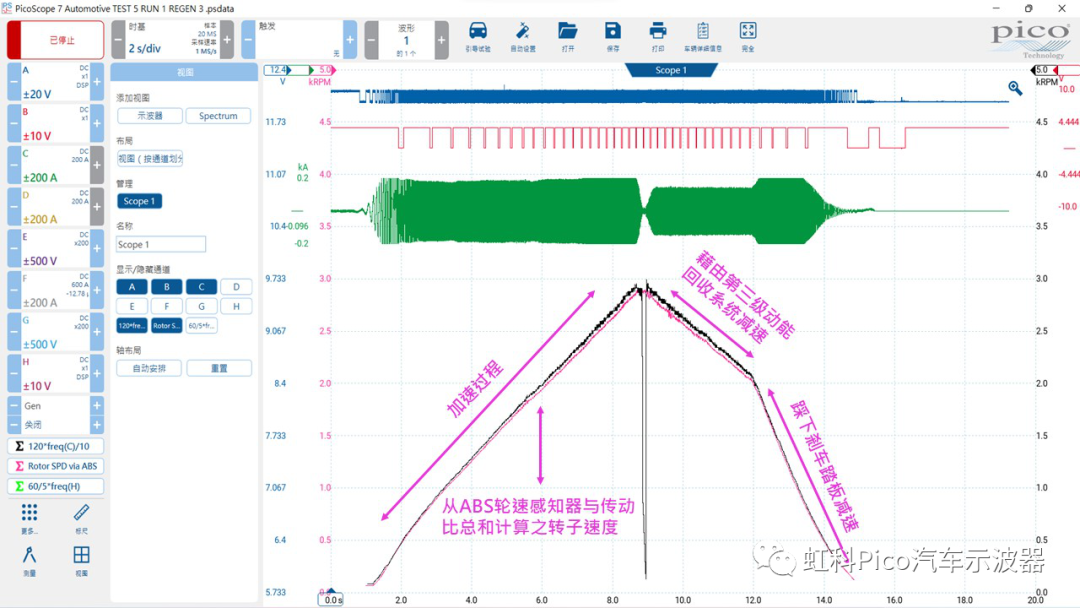 你可以看到上图的画面波型,我们从ABS轮速传感器与总齿轮比计算的转子速度明显低于同步速度! 这与同步电机的特性形成反差并显示了我们用此方式计算转子速度需要考虑此变量。 通常此变量包含整体传动系统的公差累积与转向误差等等。
你可以看到上图的画面波型,我们从ABS轮速传感器与总齿轮比计算的转子速度明显低于同步速度! 这与同步电机的特性形成反差并显示了我们用此方式计算转子速度需要考虑此变量。 通常此变量包含整体传动系统的公差累积与转向误差等等。
另一个测量转子速度方式是使用集成式的转子速度传感器(VAG将其称为”G713”)为此我们必须确定转子速度传感器相应于转子转一圈时的电循环数,但如何确定?这需要了解在SSPs530和527中描述的转子磁极数的知识,在此情况向如我先前提到的是十个,并将极数除以2来确定转子转一圈的电循环数,但为什么是除以2?这十个转子磁极交替排列:北极,南极,北极,南极……。当每个磁极被速度传感器侦测(例如一个北极),它产生一个电压输出到个别的方向,造成我们一半的正弦波型。当下一个交替的磁极(例如一个南极)被速度传感器侦测时,它产生一个相反方向的电压输出,造成另一半的正弦波型产生并完成一次电循环。因此每一个完整的电循环都必须藉由转子传感器通过两个交替磁极来产生。因此,转子每一转的电循环数会等于转子磁极数除以二(10)/2=5下图的波型能帮助理解上方的叙述。注意,对这台车辆,转子速度传感器的电循环与转子总成是一致的。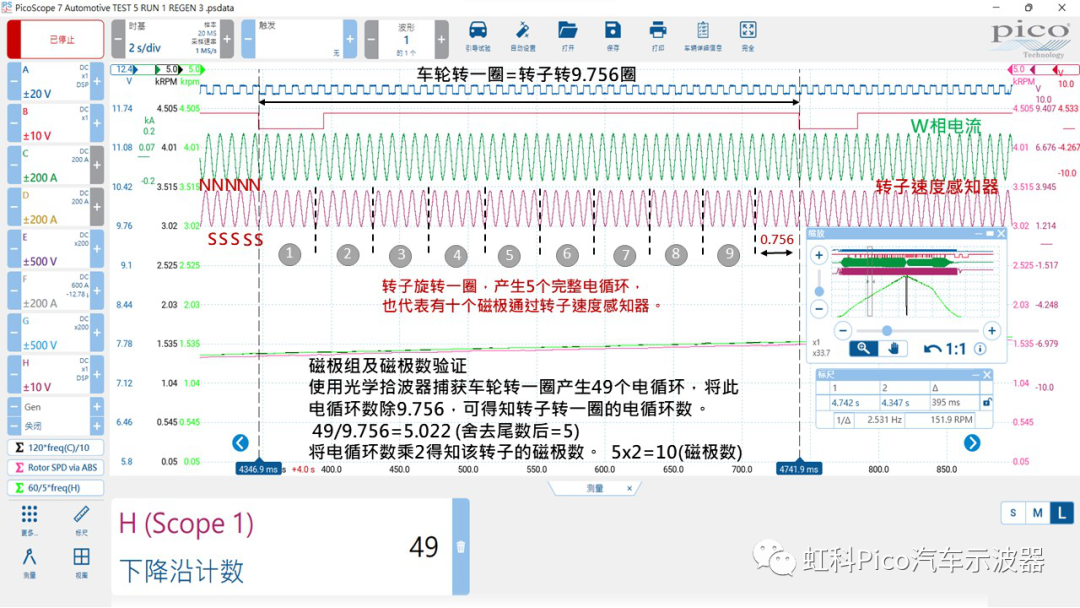 基于上述所说:如果我们知道转子的磁极数,我们可以使用该公式: 60/5*freq(H)。通道H是连接转子速度传感器。
基于上述所说:如果我们知道转子的磁极数,我们可以使用该公式: 60/5*freq(H)。通道H是连接转子速度传感器。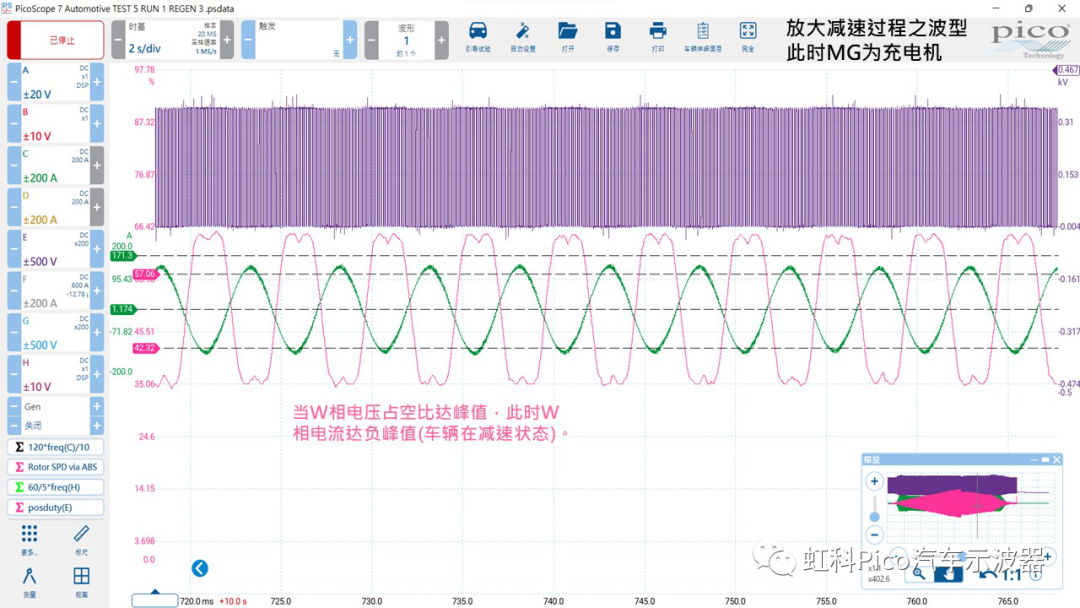 我想我们都能认同上方数学通道的绿色波型,我们的转子速度在加减速的期间确实等于我们的RMF速度。我们现在已经确定这个电机确实是同步电机。绘制所有转速和负载范围内的RMF与转子速度(使用同步MG)将在谈论到逆变器性能评估、定子完整性、转子平衡与传动系统状况时提供珍贵的数据数据。在这里我们正找寻在两个数学通道间的一致性与同步性,任何〝丢失〞或循环误差都将明显影响关注的区域。关于循环误差参阅Ben’s的“Martins’ Method(https://www.picoauto.com/library/training/the-martins-method)”文章。如果这是一个感应异步电机,在加速期间RMF速度将高于转子速度,但在减速期间会低于转子速度(一种称为〝滑差〞的现象)。这个现象与特性可以被用来做为感应异步电机MG状态的指示(电机状态或充电机状态),但这并不适用于我们的同步电机。让我们拉回原先的问题:”我们如何从捕获到的信息判断MG现在是以电机运行还是充电机运行?” 假设你在高压电池端的直流电缆没有接电流钳(上图2)且你正在量测带电流的单相电压(参考高压负极),那可以用〝相位〞来判断。注意下面画面截图中的相电压与电流的正占空比两者间的关系,对比上图3、4。
我想我们都能认同上方数学通道的绿色波型,我们的转子速度在加减速的期间确实等于我们的RMF速度。我们现在已经确定这个电机确实是同步电机。绘制所有转速和负载范围内的RMF与转子速度(使用同步MG)将在谈论到逆变器性能评估、定子完整性、转子平衡与传动系统状况时提供珍贵的数据数据。在这里我们正找寻在两个数学通道间的一致性与同步性,任何〝丢失〞或循环误差都将明显影响关注的区域。关于循环误差参阅Ben’s的“Martins’ Method(https://www.picoauto.com/library/training/the-martins-method)”文章。如果这是一个感应异步电机,在加速期间RMF速度将高于转子速度,但在减速期间会低于转子速度(一种称为〝滑差〞的现象)。这个现象与特性可以被用来做为感应异步电机MG状态的指示(电机状态或充电机状态),但这并不适用于我们的同步电机。让我们拉回原先的问题:”我们如何从捕获到的信息判断MG现在是以电机运行还是充电机运行?” 假设你在高压电池端的直流电缆没有接电流钳(上图2)且你正在量测带电流的单相电压(参考高压负极),那可以用〝相位〞来判断。注意下面画面截图中的相电压与电流的正占空比两者间的关系,对比上图3、4。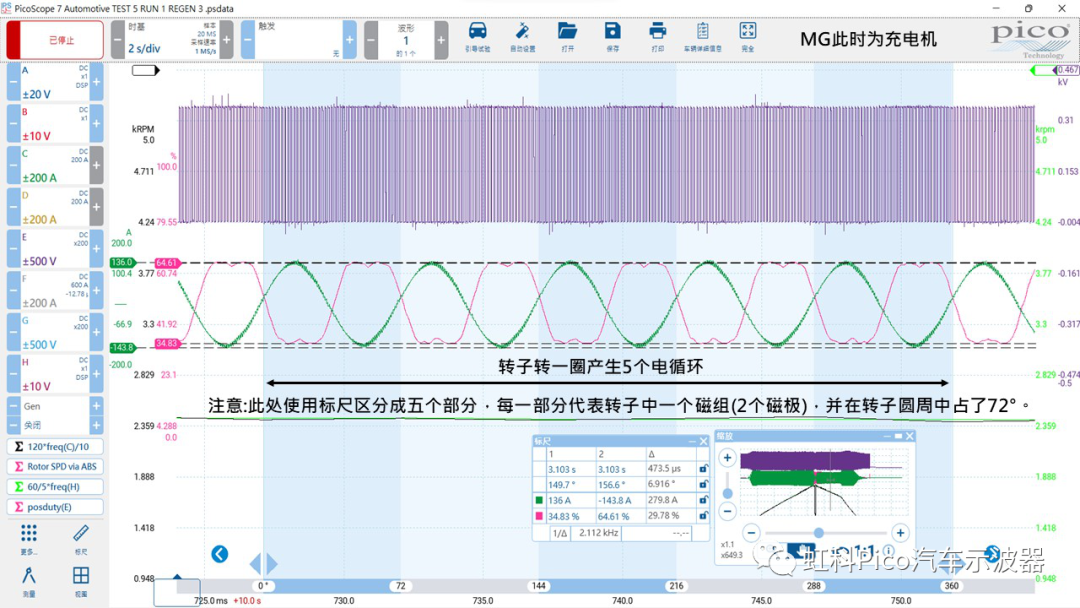 注意,数学通道“posduty(E)”显示MG相位W电压(约64%)的正占空比峰值控制为何与流经相位绕组的负电流峰值(约 -143 A)相应。相同的,我们的较低正占空比35%对应到我们的电流峰值136A。这与我们的MG作为电机时的占空比情况完全相反,他们的相位已经偏移了约180°!在以下的波型介绍了用相位标尺将360°的转子旋转分成五个区域,每一个磁极相距72°,我们可以清楚看到相电压和电流在正占空比之间的相位变化。由于我们的相位绕组电压与电流的正占空比之间的关系(相位)显示了MG(电机与充电机)的运行状态,如果我们可以简单绘制相位移动而不是放大每个部分并量测相位,那就更好了。感谢我的同事Martyn准备的数学通道。LowPass(Duty(((((atan(1/tan(pi*((posduty(E)-50)/10000)))/pi)+((posduty(E)-50)/10000))*-((atan(1/tan(pi*(C/10000)))/pi)+(C/10000)))+0.25))/0.555555555,10)我没有打算解释上述公式,它包含了ㄧ些低通滤波器、三角函数、正负载计算。 不幸的是当这项数学通道套用到上方的捕获数据后,由于通道C的错误它并没有成功绘制出数据。眼尖的人会发现,在加减速过程中,会有电流超过 200 A 的“超出范围”情况。在此情况下,数学通道无法执行计算且导致数值无限大而无法绘制数据。 在对E-Golf的类似测试进行搜寻时,“TEST 8”有另一个加减速事件的所有的相电流都在范围内且额外增加高压电池直流电压的效益。(注意减速期间的增加)现在调整数学通道,我们正在查看通道A(相位绕组U的电压正占空比)与通道D(相位绕组U的电流)相位: LowPass(Duty(((((atan(1/tan(pi*((posduty(A)-50)/10000)))/pi)+((posduty(A)-50)/10000))*-((atan(1/tan(pi*(D/10000)))/pi)+(D/10000)))+0.25))/0.555555555,10)
注意,数学通道“posduty(E)”显示MG相位W电压(约64%)的正占空比峰值控制为何与流经相位绕组的负电流峰值(约 -143 A)相应。相同的,我们的较低正占空比35%对应到我们的电流峰值136A。这与我们的MG作为电机时的占空比情况完全相反,他们的相位已经偏移了约180°!在以下的波型介绍了用相位标尺将360°的转子旋转分成五个区域,每一个磁极相距72°,我们可以清楚看到相电压和电流在正占空比之间的相位变化。由于我们的相位绕组电压与电流的正占空比之间的关系(相位)显示了MG(电机与充电机)的运行状态,如果我们可以简单绘制相位移动而不是放大每个部分并量测相位,那就更好了。感谢我的同事Martyn准备的数学通道。LowPass(Duty(((((atan(1/tan(pi*((posduty(E)-50)/10000)))/pi)+((posduty(E)-50)/10000))*-((atan(1/tan(pi*(C/10000)))/pi)+(C/10000)))+0.25))/0.555555555,10)我没有打算解释上述公式,它包含了ㄧ些低通滤波器、三角函数、正负载计算。 不幸的是当这项数学通道套用到上方的捕获数据后,由于通道C的错误它并没有成功绘制出数据。眼尖的人会发现,在加减速过程中,会有电流超过 200 A 的“超出范围”情况。在此情况下,数学通道无法执行计算且导致数值无限大而无法绘制数据。 在对E-Golf的类似测试进行搜寻时,“TEST 8”有另一个加减速事件的所有的相电流都在范围内且额外增加高压电池直流电压的效益。(注意减速期间的增加)现在调整数学通道,我们正在查看通道A(相位绕组U的电压正占空比)与通道D(相位绕组U的电流)相位: LowPass(Duty(((((atan(1/tan(pi*((posduty(A)-50)/10000)))/pi)+((posduty(A)-50)/10000))*-((atan(1/tan(pi*(D/10000)))/pi)+(D/10000)))+0.25))/0.555555555,10)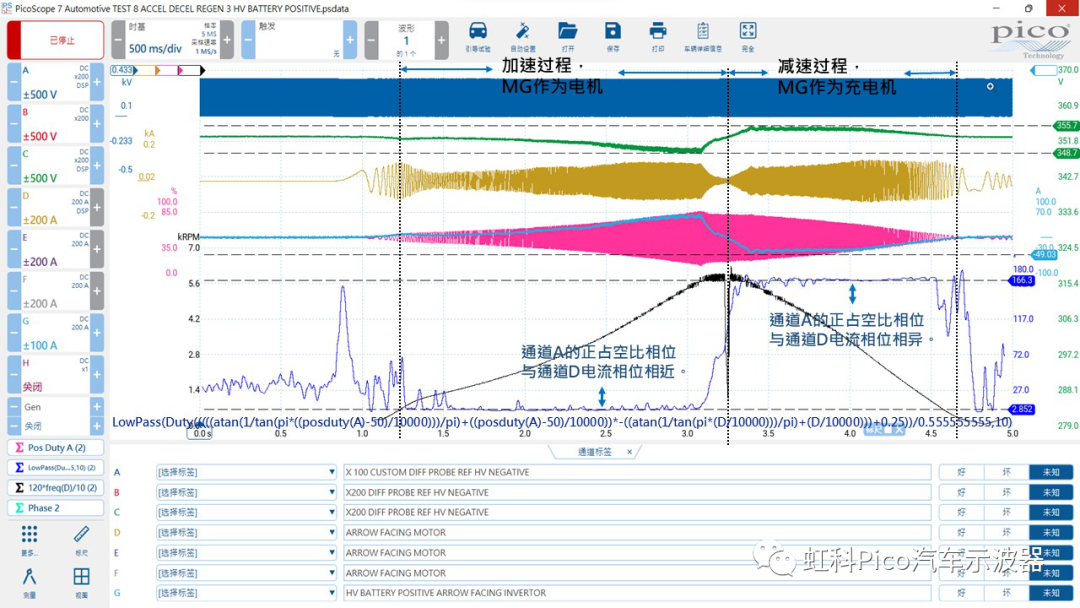 在以上画面截图可以看出相位绕组U的电压正占空比(参考高压负极)与相位绕组U的电流之间的相位移动来判断我们MG的状态。 在以下画面截图中,我遮蔽了一些波形并移除一些标尺来更清楚显示相位移动之值。
在以上画面截图可以看出相位绕组U的电压正占空比(参考高压负极)与相位绕组U的电流之间的相位移动来判断我们MG的状态。 在以下画面截图中,我遮蔽了一些波形并移除一些标尺来更清楚显示相位移动之值。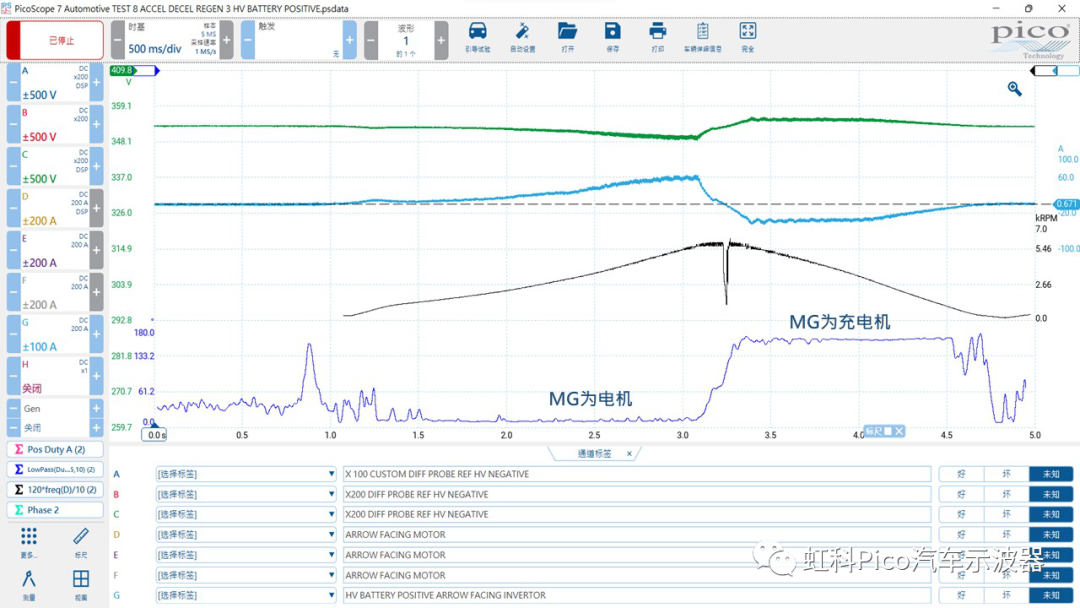 我希望这有帮助,随着我们之后深入探讨感应异步电机后将会比较相关的研究结果及更多的文章内容,我们有很多内容可以一起学习讨论。
我希望这有帮助,随着我们之后深入探讨感应异步电机后将会比较相关的研究结果及更多的文章内容,我们有很多内容可以一起学习讨论。
-
电机
+关注
关注
142文章
8898浏览量
144967
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论