 测速测距微波雷达在智能交通信息实时检测中的应用技术解析
测速测距微波雷达在智能交通信息实时检测中的应用技术解析

导读:ITS是未来交通系统的发展方向,实时交通信息是ITS最基本的信息源之一。相较于线圈检测技术与视频检测技术,雷达检测技术在交通信息检测方面具有无须破坏路面、抗干扰能力强、安装维护方便、使用寿命长、应用前景广阔等优势。根据城市道路环境特点与应用需求,交通流量监测雷达TBR-540、广域多目标雷达WTR-470与交通流量计雷达WTR-422可满足各路段交通信息实时检测需求,帮助掌握路网交通状态的时空变化规律与趋势。
近年来随着经济的发展,交通需求日益增加,城市交通拥堵,交通事故频发,交通环境恶化等成为当前世界各国面临的共同问题。此外,交通系统是一个复杂的综合性系统,单独从道路或车辆的角度来考虑,都将很难解决交通问题。

20世纪80年代末90年代初,智能交通系统(ITS=Intelligent Transportation System)应运而生,许多发达国家和发展中国家相继提出各自的发展战略,并试图通过发展ITS带动本国基于车辆、通信、电子、计算机以及网络等高新技术的经济大发展。据预测,应用智能交通系统后,可有效提高交通运输效益,使交通拥挤降低20%,延误损失减少10~25%,车祸降低50~80%,油料消耗减少30%,废气排放也得以减少。
ITS是未来交通系统的发展方向,它是将先进的信息技术、数据通讯传输技术、电子传感技术、控制技术及计算机技术等有效地集成运用于整个地面交通管理系统而建立的一种在大范围内、全方位发挥作用的,实时、准确、高效的综合交通运输管理系统。
实时交通信息是ITS最基本的信息源之一,只有对各道路实时交通信息有了准确地掌握才能有效地实施和发挥诸如交通诱导之类的ITS功能,因此交通信息的实时检测技术是ITS技术中最核心也是最基本的技术之一。
一、交通信息实时检测技术
随着道路交通信息监测、云计算、大数据、物联网、车联网等新技术的不断发展,对交通信息检测的技术手段更加多样,采集的信息更加丰富。目前已有多种交通信息采集技术在实际中应用,如最先开始发展的路面接触式交通信息采集技术——线圈检测技术,以及新发展起来的路面非接触式交通信息采集技术——视频检测技术与雷达检测技术等。通过这些技术采集到的交通信息主要包括各车道的车速、车流量、车道占有率、车型、车头时距等。
线圈检测技术基于电磁感应原理,它的传感器是一个埋在路面之下、通过一定工作电流的环形线圈。当汽车经过采集装置上方时会引起相应的压力、电场或磁场的变化,最后采集装置将这些力和场的变化转换为所需要的交通信息。经过多年的发展,路面接触式的交通信息采集技术已经很成熟,其测量精度高,易于掌握,一直在交通信息采集领域中占有主要地位。
但是这种路面接触式的交通采集装置有着不可避免的缺点:安装或维护需暂时阻碍交通,安装施工量大;切缝软化了路面,容易使路面受损,特别是桥梁、立交、高架路等路面严禁切割施工的地方采用环形线圈,否则会造成严重安全隐患;使用效果及寿命受路面质量和自然环境影响较大,环形感应线圈寿命一般仅2年;由于自身测量原理限制,当车流拥堵,车间距小于3m的时候,其检测精度大幅降低,甚至无法正常检测。
视频检测技术是利用车辆进入检测区域(虚拟线圈)导致背景灰度变化的原理来进行车辆检测,直观可靠,安装无须破坏路面。但缺点是对移动车辆的鉴别有一定的困难,在拍摄高速移动车辆时需要有足够快的快门(至少是1/3000PX)、足够数量的像素以及可靠的图像算法。另外,受光度、气候条件的影响很大,且需要进行镜头清洁等日常维护。
雷达检测技术是利用车辆经过检测区域时引起雷达电磁波返回时间或频率的变化进行车辆检测,安装维护方便、使用寿命长、几乎不受光照度、灰尘以及风、雨、雾、雪等天气气候影响。因此,相较于视频检测技术,雷达检测技术作为新一代路面非接触式交通信息采集技术更具应用与发展前景。而将雷达技术应用于交通信息采集关键是要解决从微波(指波长在1mm~1m,频率在300mhz~300ghz范围内的电磁波,是无线电波中分米波、厘米波、毫米波和亚毫米波的统称。)雷达回波信号中提取车辆信息问题。简单来说,就是利用雷达技术所具有的测速和测距功能来实现交通信息的实时检测。
二、车速检测
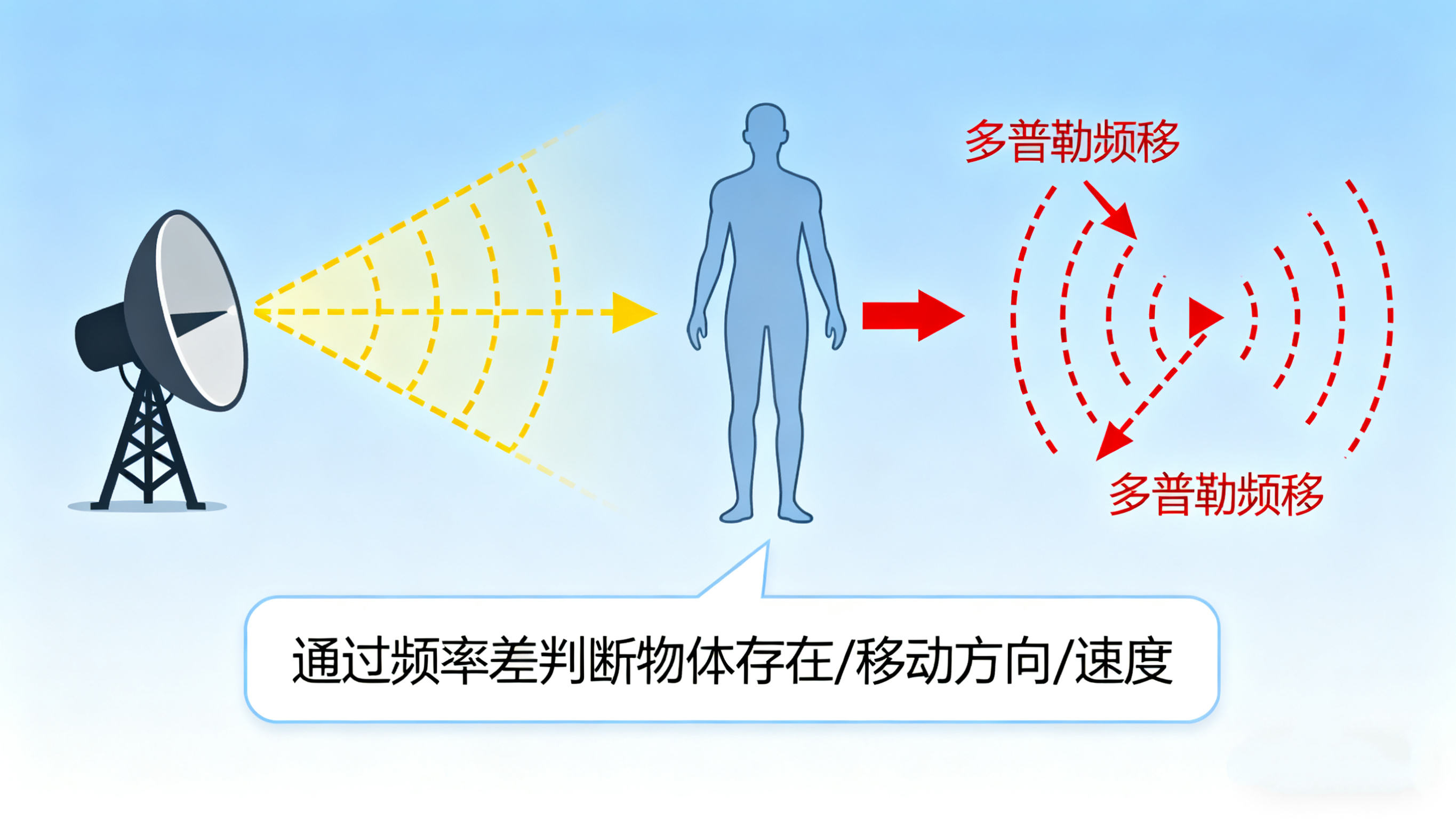
雷达检测技术对车辆速度的检测基于微波多普勒(Doppler)效应。微波在传播过程中,碰到物体时会发生反射,反射波的频率会因物体运动状态的变化而变化。当物体固定不动时,反射波的频率保持不变;当物体向靠近波源的方向移动时,微波反射波被压缩,导致频率增高;当物体向远离波源的方向移动时,微波反射波被拉伸,导致频率降低。这就是多普勒效应。基于多普勒效应原理可以对车辆的速度进行准确测量,且具有技术成熟、价格相对较低、安装维护简单(不用破坏路面和中断交通,可安装于桥梁与隧道等线圈难以安装的路段)、容易推广等特点。
三、车流量检测
采用调频连续波(FMCW,受一定频率周期性线性连续波调制的微波)原理的雷达可以很好的实现距离检测功能,基于这种测距功能,通过测量雷达与车辆之间的距离与角度就可以判断车辆处于哪一条车道;对判断车道是否有车辆存在,可通过雷达往各车道发射一系列连续调频波,并接收各车道上车辆反射回来的电磁波信号来实现,由于不存在多普勒频移,各车道上车辆和雷达之间的距离不同,反射回来的电磁波与当前雷达发射的电磁波频率之差也不同,雷达通过对中频信号进行频谱分析,并判断各车道对应频率分量的强弱即可知道各车道上有没有车辆存在,以此来检测区域内车流量与车道是否拥堵。
四、其他交通信息参数检测
除了车流量和速度以外,另外几个主要交通信息参数是车型、车道占有率和车头时距。由于多普勒频率的持续时间是可以测量的,因此,在获取车辆速度的基础上,利用速度与时间的乘积,即可推算出车辆的长度,由此可以获取车型信息,如长车、中长车、短车。车道占有率以及车头时距则可通过检测车辆进入和离开检测区域的时刻来计算。
但设备安装位置不同,进入和离开检测区域时刻的准确度也不同。例如,因不同的检测灵敏度对应不同的时刻,基于FMCW原理的侧向安装(顶装)微波雷达对车辆进入和离开检测区域时刻的测量只能通过建模完成,给出平均速度并提供车型参考,其准确度依据模型而定;而正向安装的微波雷达却可以直接准确测量。因此,对于只要求检测车流量和大致了解车辆平均速度的应用场景,侧向安装(侧装)的微波雷达较为合适;而对于要求车流量、实时速度、车型、车头时距等交通信息都很准确的应用场合,则需要采用正向安装(顶装)的微波雷达。
五、基于微波雷达技术的交通信息检测方案
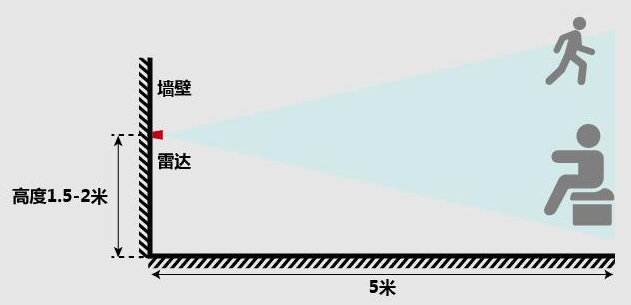
根据城市道路环境特点与应用需求,巍泰技术(武汉)有限公司基于多普勒效应测速技术与FMCW原理测距技术,推出了可检测车速、车流量与平均车速的侧向安装(顶装)交通流量监测雷达TBR-540,以及可以准确检测车速、平均速度、车流量、车型、车道占有率、车头时距、交通拥堵情况、车辆逆行状况等交通基本信息的正向安装(顶装)的广域多目标雷达WTR-470与交通流量计雷达WTR-422。TBR-540、WTR-470与WTR-422雷达检测与安装示意图如下:
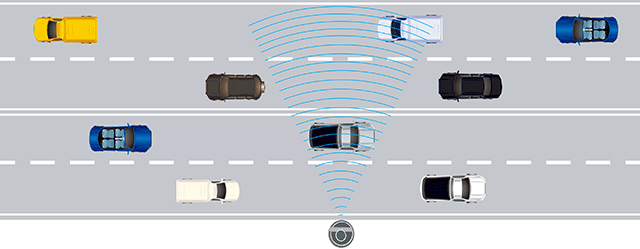 交通流量监测雷达TBR-540检测与侧向安装示意图
交通流量监测雷达TBR-540检测与侧向安装示意图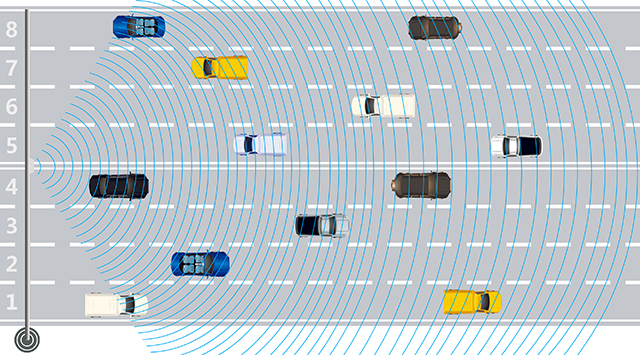 广域多目标雷达WTR-470检测与正向安装示意图
广域多目标雷达WTR-470检测与正向安装示意图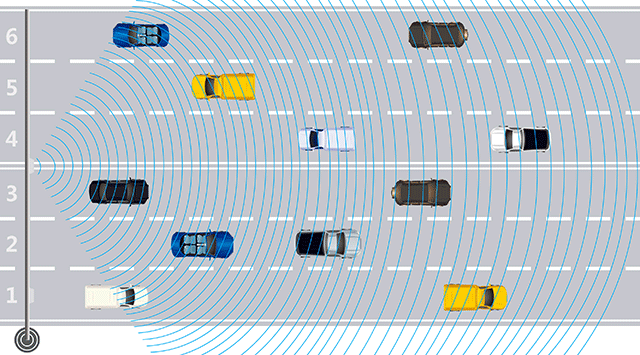 交通流量计雷达WTR-422检测与正向安装示意图
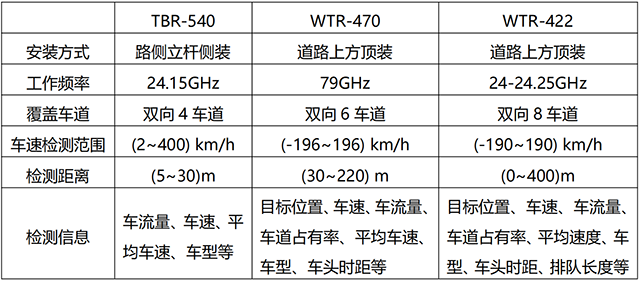
交通流量计雷达WTR-422检测与正向安装示意图其中,WTR-470与WTR-422均采用了毫米波技术原理,可分别检测双向6车道与8个车道上的128个目标车辆的深度信息,并进行实时跟踪,具有不受光、热、雾、烟、灰尘等外界环境因素的影响,抗干扰能力强,环境适应性好,全天候不间断工作的特性。三个雷达之间的比较如下:
基于以上微波雷达测速测距功能,在多个路段上安装多个微波车辆检测器,通过这些微波车辆检测器可以不断地获取大量连续的动态交通数据,这些数据可为研究道路交通状态的时空变化规律奠定重要基础。当某一路段发生交通事故时,对采集的交通数据进行特征提取,并对道路交通流状态进行分析研究,便可确定瓶颈位置并得到瓶颈处拥挤的开始时间、结束时间和拥挤的持续时间,及时准确地预测道路交通流的状态,进而掌握路段瓶颈处交通拥挤规律。此外,通过对多个路段交通信息的采集与处理可以得到路网历史动态交通数据的统计和分析,从而得到路网交通状态的时空变化规律,帮助交管部门预测准确的交通状态变化趋势。
-
微波雷达
+关注
关注
4文章
111浏览量
22671
发布评论请先 登录

纳雷科技交通测速雷达TSC224全新升级
AMG027-002多普勒收发器
固态激光雷达参数以及避障视频
微波与毫米波技术发展及介电常数测量系统应用进展

雷达技术原理与典型应用:24GHz毫米波雷达及5.8GHz微波雷达分析

lora通信技术的特点
AMG049-003多普勒雷达速度传感器
微波雷达和毫米波雷达有什么区别
智能物联网实时通信实战:WebSocket技术解析 !
隼眼科技亮相2025中国交通信息化学术暨技术年会
超声波测距换能器:工业与生活中的测量利器
微波雷达水位在线监测装置:技术解析与应用价值




评论