 姿态传感器和IMU的联系和区别
姿态传感器和IMU的联系和区别
文章开头,我们先看两个术语:航向姿态参考系统(英文简称AHRS)和惯性测量单元(英文简称IMU)。今天,要围绕这两个我们不太熟悉的概念,来为您介绍一下,AHRS和IMU的在利用加速度传感器、陀螺仪、磁力计等传感器进行惯性测量等方面的联系与区别,以及它们各自的适用领域。
在这之前,我们还需要先了解一下有关运动方面的一些基本知识。
运动分析简介
我们知道,在三维空间中若将物体视为刚体(不考虑形变),不管其运动多么复杂,都可以将该运动分解为该物体质心的曲线运动和绕质心的旋转运动。该曲线运动通常可以用运动初始条件和加速度表示为:


而旋转运动的角度可以用角速度和时间的方程式进行表示。在实际运动测量跟踪中,通常是使用加速度计和陀螺仪对物体的加速度和旋转角进行测量。
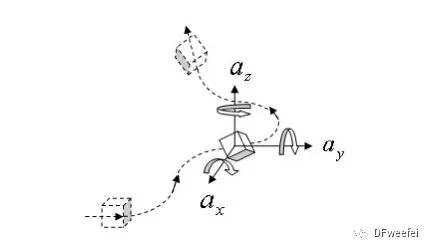
刚体三维运动解析
AHRS与IMU
AHRS(AttitudeHeadingReferenceSystem)全称航向姿态参考系统,是利用加速度传感器、陀螺仪以及电子罗盘对实际目标各运动参数和方位进行测量,通过对测量值加以处理和计算以对目标的位置和运动状态进行实时跟踪监控。
IMU(InertialMeasurementUnit)也称惯性测量单元是利用加速度传感器和陀螺仪对目标系统加速度和旋转角速度进行测量,以得到目标在惯性参考系下的运动和状态的装置。
参考系统区别
从二者的定义上不难看出,AHRS进行测量时所选择的参考系是地球自身,其测量对象的位置也是具体的地理位置。而IMU惯性测量单元则不同,其测量的是相对特定惯性参考系下的位置和运动状态,该参考系可以是房屋、建筑等固定点或者匀速运动的系统。从概念上来说,惯性测量单元应用范围更加广泛,因为AHRS的参考点地球也是一个惯性参考系(并不绝对,仅限地球范围。在太阳系内以太阳作为惯性参考系)。
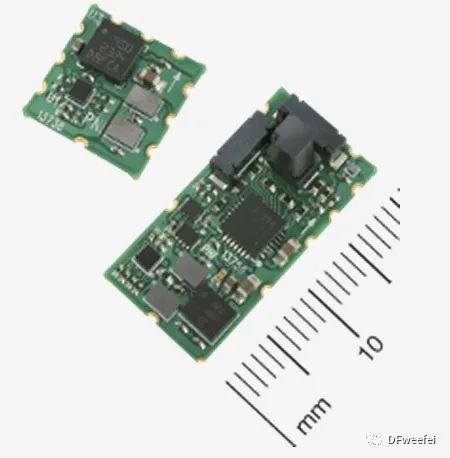
9轴姿态检测模块
系统组成区别
尽管AHRS和IMU的测量元件基本上相同,但由于AHRS的参考系统不同,AHRS相比IMU要多出个磁力计。在AHRS进行运动轨迹和状态监测时,由于陀螺仪时漂的问题,在对运动过程中的旋转角度进行积分时,会随着时间推移而误差越来越大,因此,需要磁力计及时对运动的地理方位角度进行校准。
测量准确性
由于AHRS选择地球作为参考系,并通过磁力计测量电磁场进行位置的校准,相比而言,不包含磁力计的惯性测量单元精度往往要更高。通过磁力计对地理方位角进行校准,固然可以在一定程度上提高准确性,然而磁力计自身误差以及测量时漂和复杂磁场等因素的存在,同样会导致测量的准确性下降。此外由于IMU参考系统的不确定性,通常其采用精确度和稳定性更好的陀螺仪,以保证旋转角测量的准确性,当然相比而言,一般IMU的成本更高。


AHRS通常用在航空飞行测量、地面机动车辆遥控、无人飞行器跟踪等领域中
应用范围
由于AHRS对参照系的选择,使得其应用领域不如IMU应用广泛。AHRS通常可利用磁力计等传感器,用在航空飞行测量、地面机动车辆遥控、无人飞行器跟踪等领域中。由于IMU的参考系灵活变动性,惯性测量通常可用于室内轨迹推算、盲区导航、体感游戏、航天测算以及军事惯性制导等方面。
-
IMU
+关注
关注
6文章
301浏览量
45717 -
惯性测量单元
+关注
关注
2文章
43浏览量
10437 -
AHRS
+关注
关注
0文章
24浏览量
14016 -
姿态解算
+关注
关注
0文章
49浏览量
8258
发布评论请先 登录
相关推荐
闭环传感器与开环传感器的区别
《DNK210使用指南 -CanMV版 V1.0》第二十三章 六轴传感器——姿态解算实验
爱普生(EPSON) 惯性测量单元(IMU)、陀螺仪传感器等模块应用领域选型介绍

lidar传感器和激光测距传感器的区别
电感传感器和电容传感器的区别
EPSON新品IMU传感器M-G570PR投产,功能更强大!

变送器与传感器有什么区别
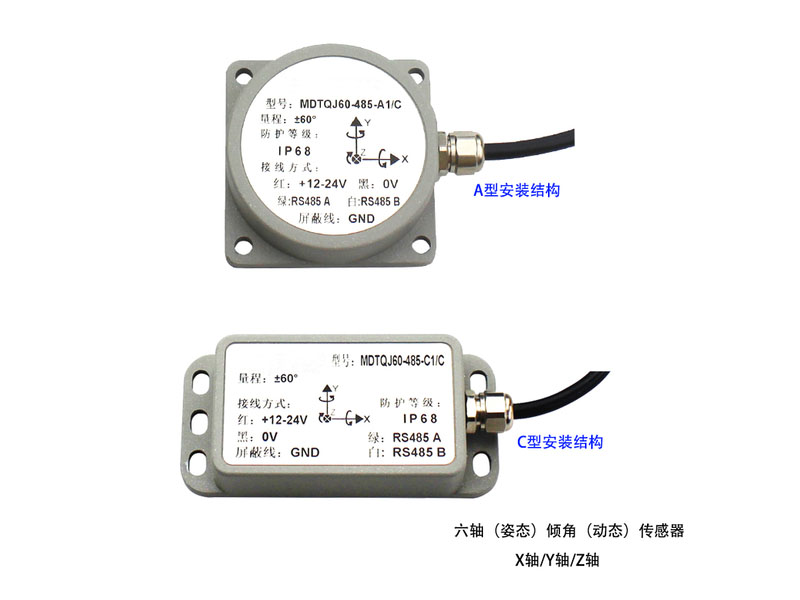
六轴姿态倾角动态传感器
变送器与传感器的区别
【核芯观察】IMU惯性传感器上下游产业梳理(二)
【核芯观察】IMU惯性传感器上下游产业梳理(一)
爱普生(EPSON)开发新IMU产品M-G370PDS改善姿态和震动控制





 工商网监
工商网监
评论