 智嵌物联2路网络继电器控制器使用方法
智嵌物联2路网络继电器控制器使用方法

一、于手册
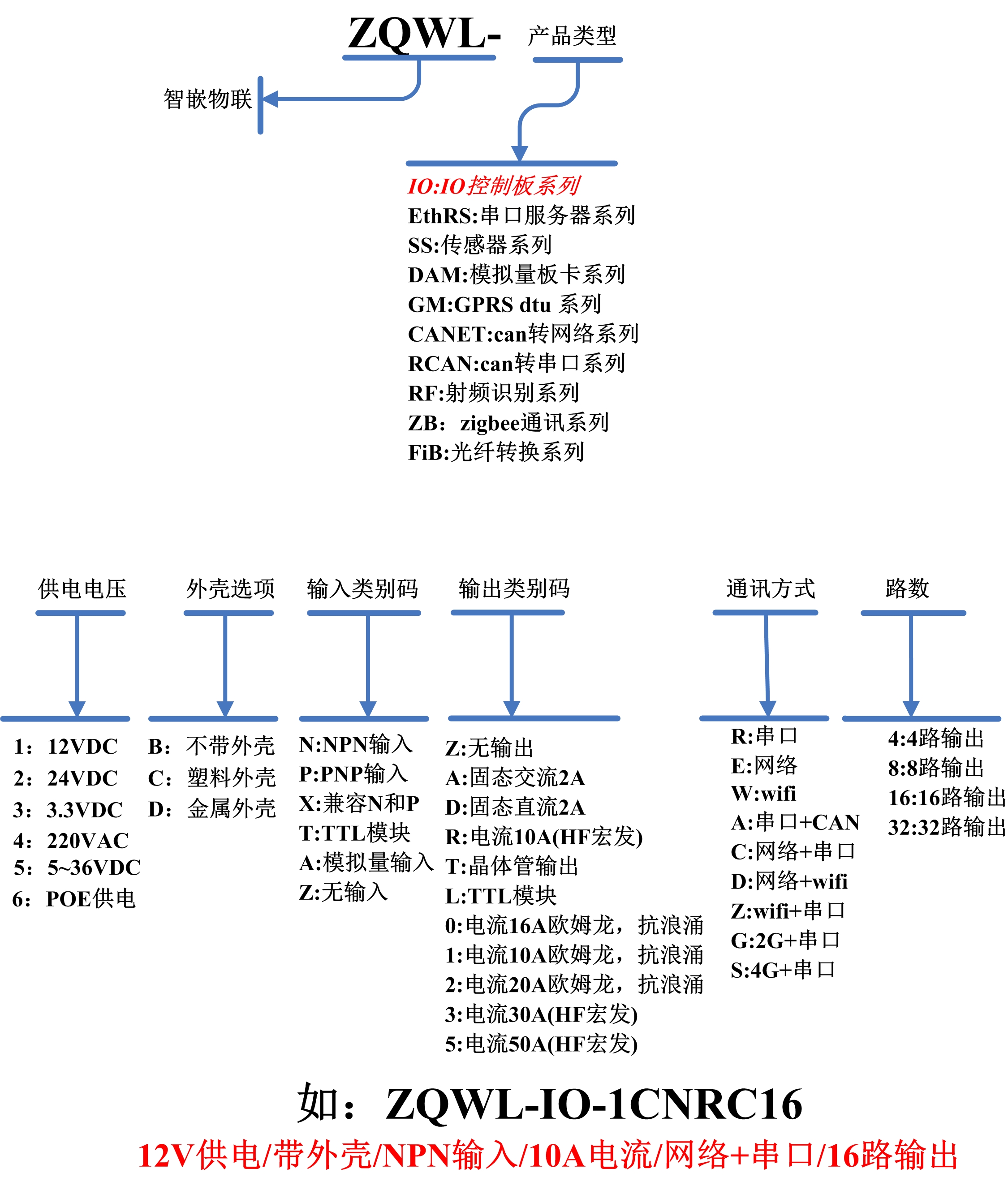
1.1命名规则
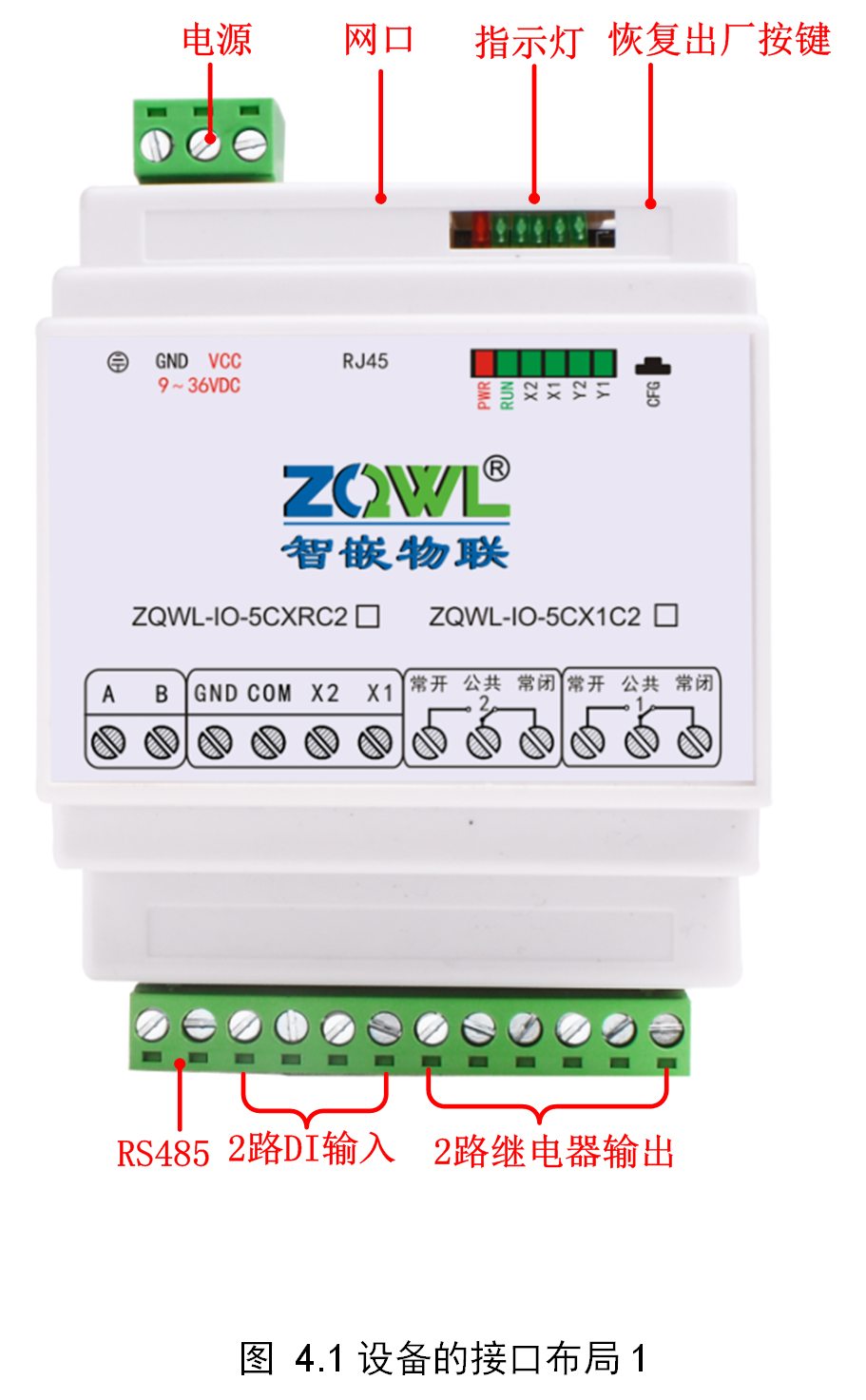
智嵌物联继电器控制设备的命名规则如图1.1所示。
1.2本手册适用型号
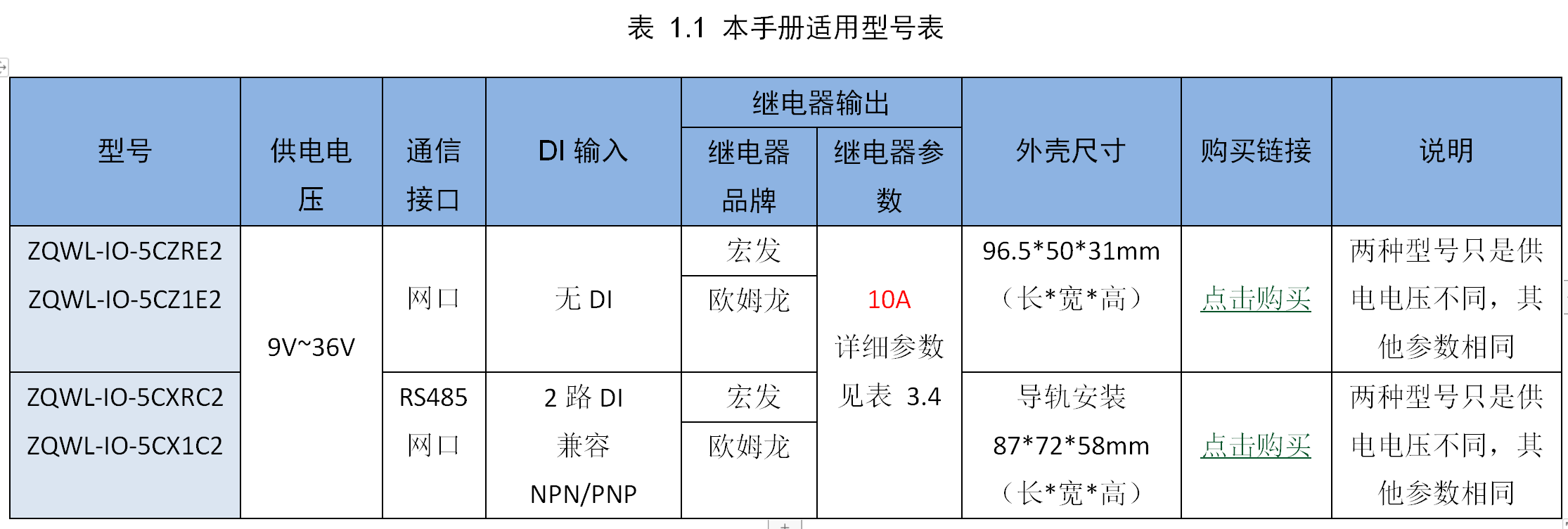
除特别说明,本手册所介绍的功能均适用型号如表1.1所示。
不同型号的设备在硬件参数上有所差别,软件功能上完全一样,本手册的案例以ZQWL-IO-5CXRC2为例进行说明,其他型号的设备用法完全一样。
二、产品快速入门
智嵌物联研发的2路网络继电器设备,是一款2路NPN和PNP兼容型光电输入、2路继电器输出的工业级IO控制板。控制板具有1路以太网口和1路RS485通讯接口,可以通过ModbusTCP/RTU或自定义协议实现对该控制板的控制,也可以通过本公司开发的上位机控制软件控制。本控制板具有串口服务器功能(网络和RS485数据互相转换)。
继电器输出负载电流10A,继电器品牌可选,具体型号说明详见表1.1所示,或直接向公司业务咨询。
2.1功能特点
- 工业级;
- 2路DI、2路DO、1路RS485、1路RJ45,详见表1.1所示;
- 支持主动上报、定时控制、联动控制、延时断开等。
- 支持静态和动态IP;
- 支持网线交叉直连自动切换;
- TCP服务器模式下,可支持4个客户端的连接;
- 支持DNS功能;
- 可以跨越网关,交换机,路由器;可以工作在局域网,也可工作在互联网;
- 支持协议包括ETHERNET、ARP、IP、ICMP、UDP、DHCP、TCP;
- 支持Modbus TCP转RTU功能;
- 支持心跳包、注册包。
- 支持接入智嵌云。
- 支持APP控制。
- 支持DTU功能。
- 丰富的LED状态指示灯,快速定位问题;
- 支持本地升级;
- 支持导轨安装。
本节是为了方便用户快速对该产品有个大致了解而编写,第一次使用该产品时建议按照这个流程操作一遍,可以检验下产品是否有质量问题。
注意,测试前请务必检查电源适配器是否与控制板型号相符合,如果没有特别注明,本文档均以ZQWL-IO-5CXRC2为例说明。
所需要的测试软件可以到官网下载:
http://www.zhiqwl.com/
2.2硬件准备
为了测试ZQWL-IO-5CXRC2,需要以下硬件:

2.3使用配置软件控制
本公司提供有控制软件,第一次使用时建议使用该智嵌物联的配置软件来控制。
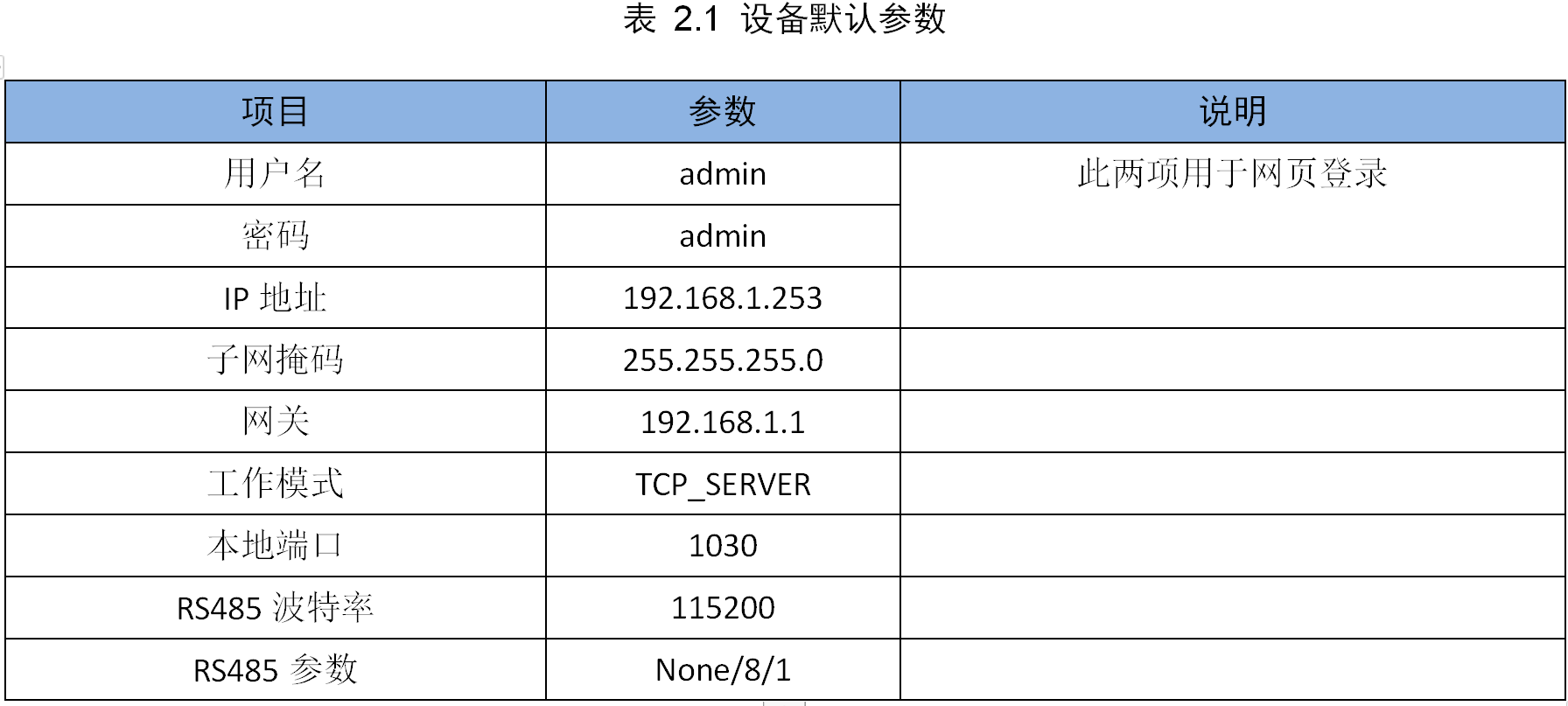
控制板的出厂默认参数如表2.1所示。
1.测试之前必须保证电脑的IP是和设备IP处于一个网段内,如果不在一个网段内,需要重新设置电脑的IP地址(静态IP),如图2.2所示。
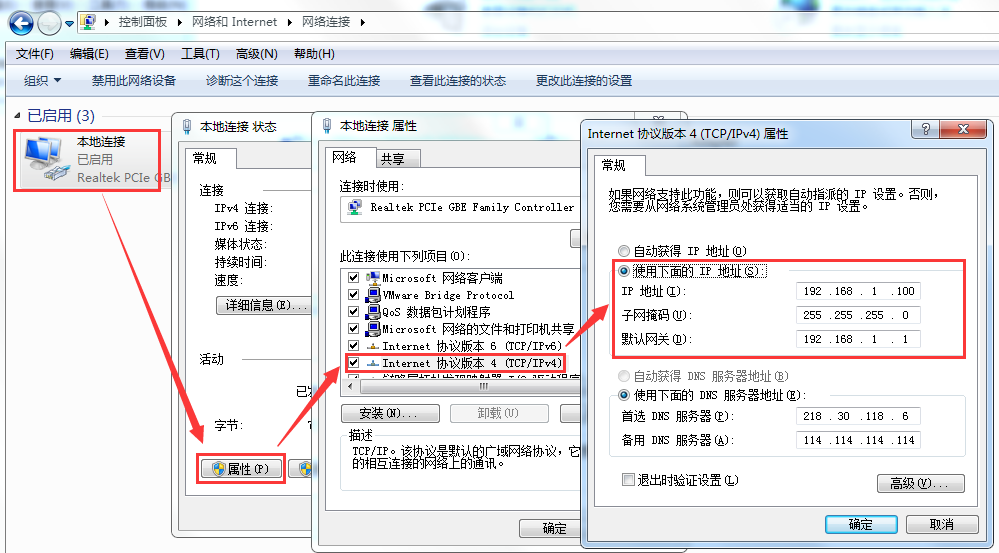
图2.2电脑IP地址设置
2.硬件连接
用网线将电脑的网口和设备的网口连起来,并接上电源适配器(注意,“VCC”接电源正极(红线),“GND”接电源负极(黑线)。
3.选择正确的网卡
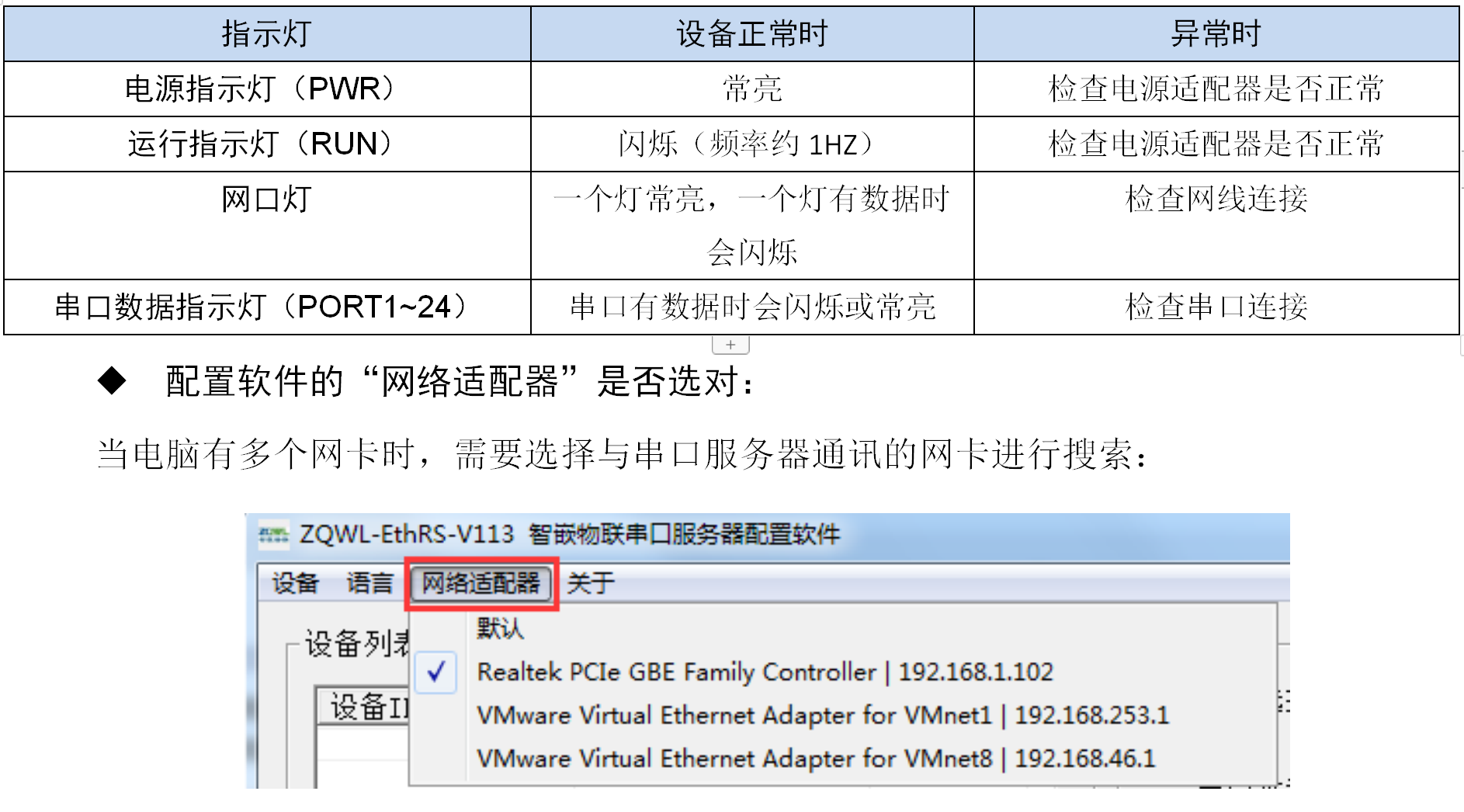
网口灯正常后(一个灯常亮,一个灯闪烁),打开控制软件并选择合适的网络适配器(与设备的IP在同一网段)。
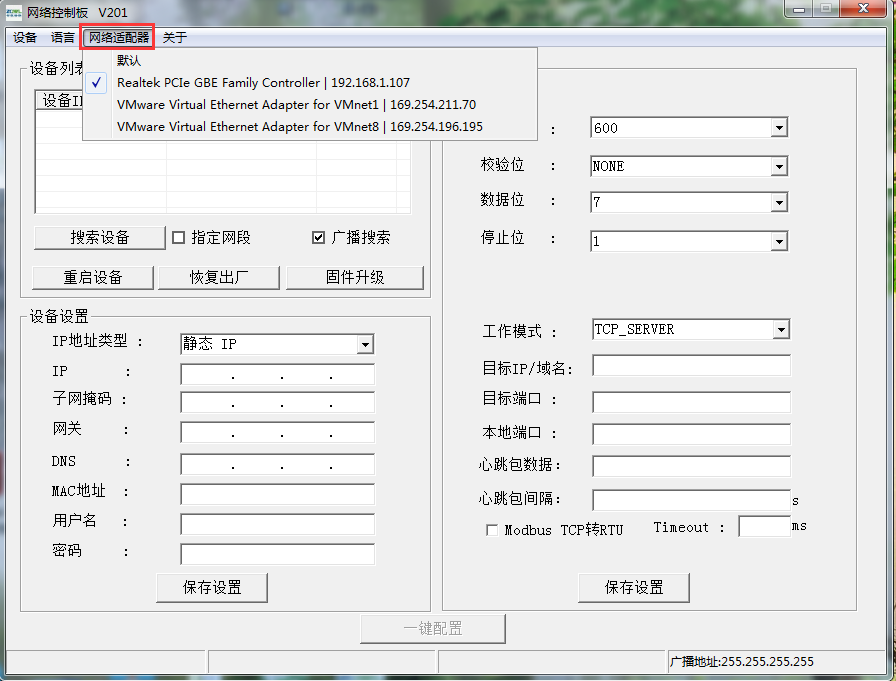
图2.3选择正确的网络适配器
4.搜索设备
点配置软件中的“搜索设备”按钮,如果硬件连接正常并且IP设置正常,则会搜到设备,如图2.4所示。
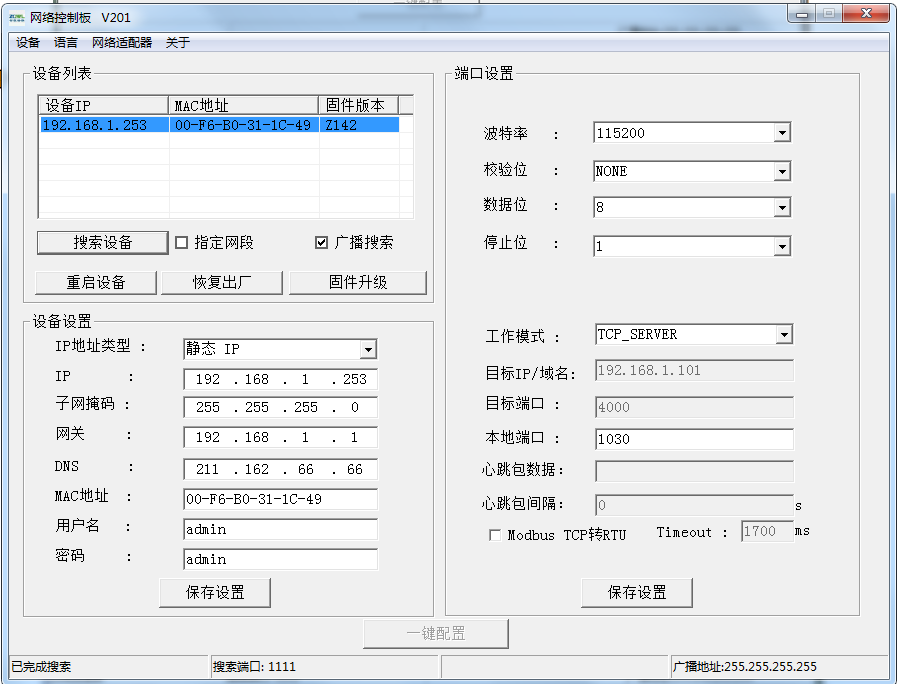
图2.4搜索设备
5.对设备进行控制
选中搜到的设备,用鼠标双击,或点软件左上角的“设备”,选择下拉列表“IO控制”,如图2.5所示。
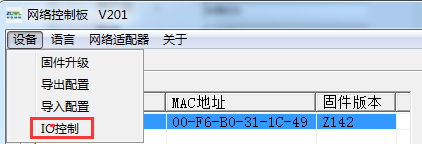
图2.5控制设备1
弹出控制页面如图2.6所示。
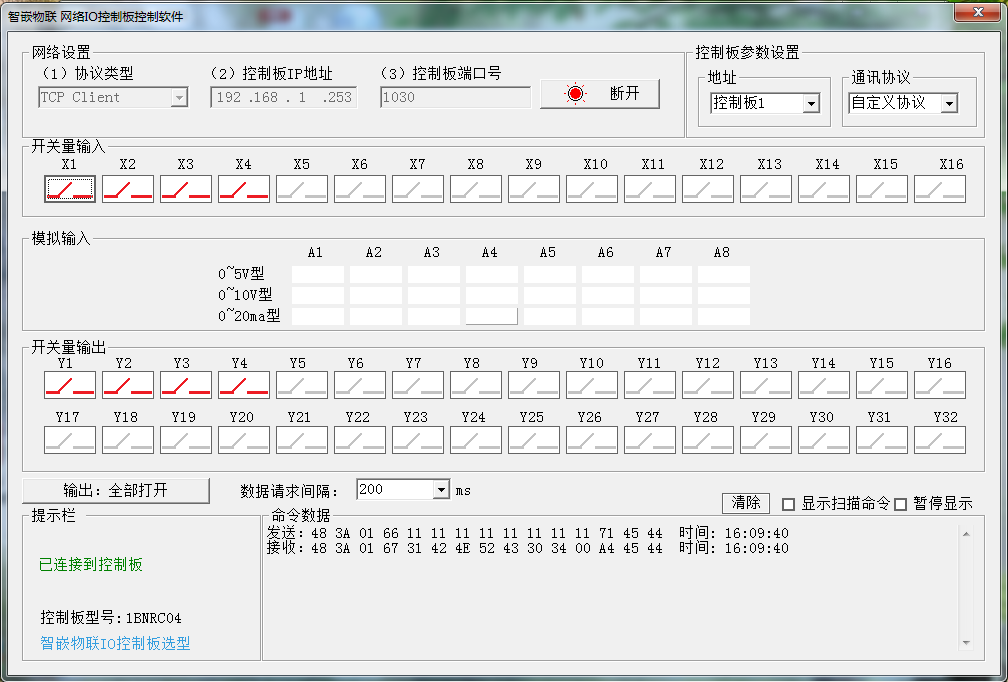
图2.6控制设备2
说明:
模拟输入:“模拟输入”对本控制板无效。
开关量输入:X1~X2即为控制板的DI输入状态,红色表示无信号,绿色表示有信号;
开关量输出:Y1~Y2即为控制板的DO继电器输出状态,红色表示继电器的常开触点与公共端断开,绿色表示继电器的常开触点与公共端闭合,可以通过单击来改变状态。
输入输出状态的数据请求间隔可以设定,默认是200ms。如果将“显示扫描命令”打勾,则会看到输入输出的数据请求指令发发送以及控制板的返回,如图2.7所示。
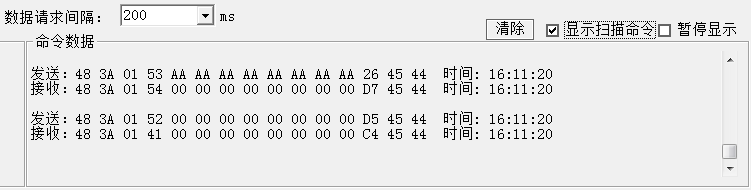
图2.7命令显示窗口
调试时一般不将该选项打勾,以便手动发送的命令和返回的数据方便看到。例如,手动点“输出:全部打开”,如图2.8所示。
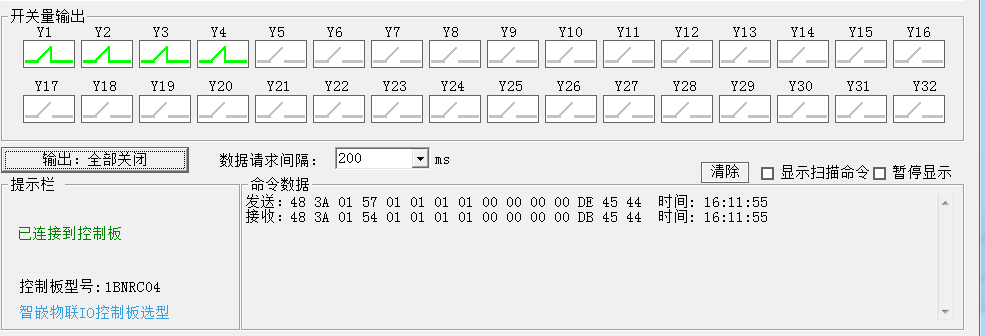
图2.8全部打开/关闭
至此,已实现通过智嵌物联专用的配置软件对设备的DO、DI进行控制的目的了。
2.4使用网络调试助手控制
通过网络调试助手向设备发送控制指令,即可实现对设备的控制,指令格式详见第7章介绍。
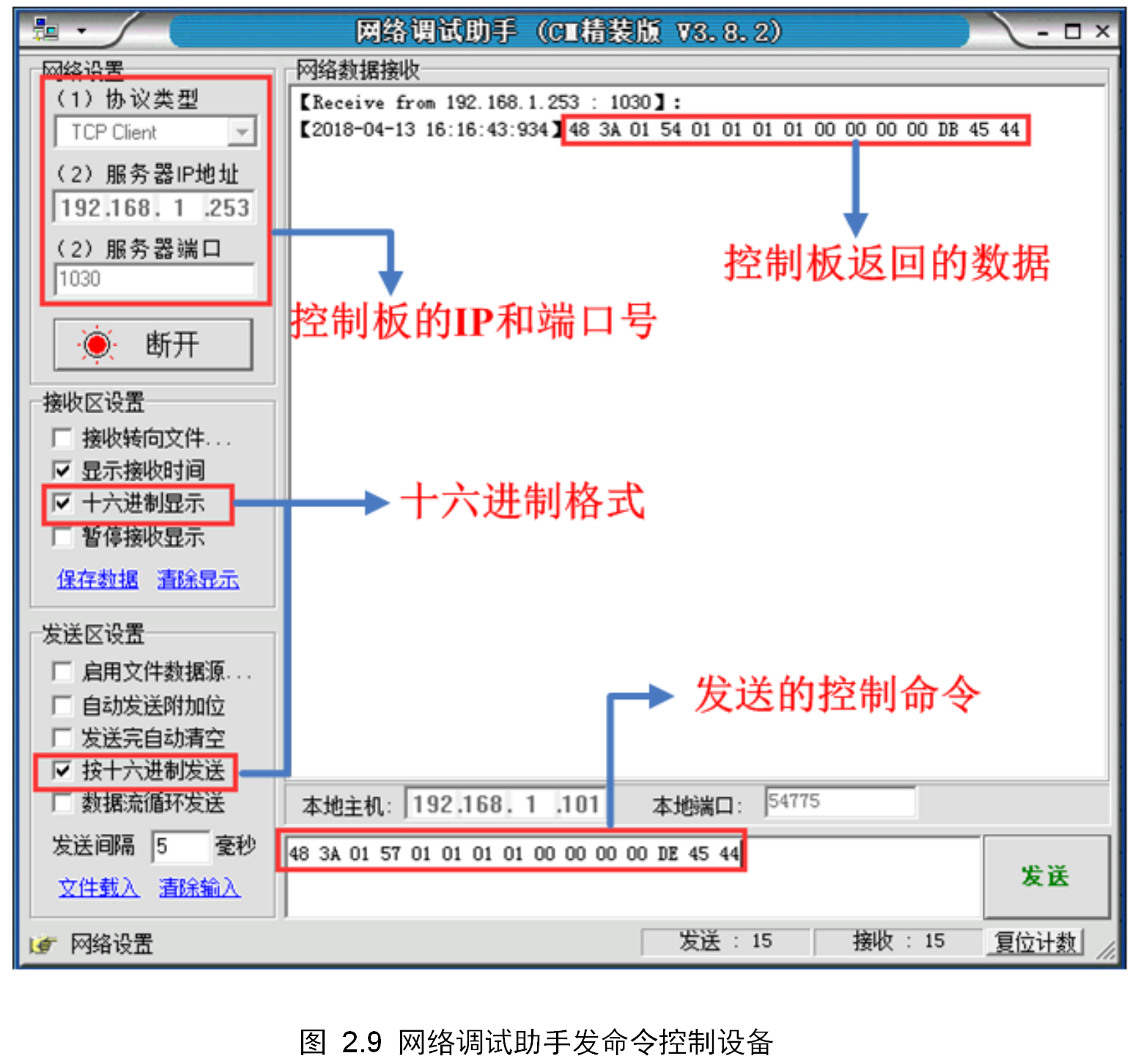
打开网络调试助手,在网络助手的“协议类型”下拉列表中,选择“TCP Client”(控制板的工作模式是TCP SERVER);将“服务器IP地址”一栏中输入设备的IP地址:192.168.1.253.在“服务器”端口一栏中输入控制板的本地端口:1030。以上都设置好后,点击“连接”,连接成功后,连接按钮的状态将变成红色灯,如图2.9所示。
三、产品规格
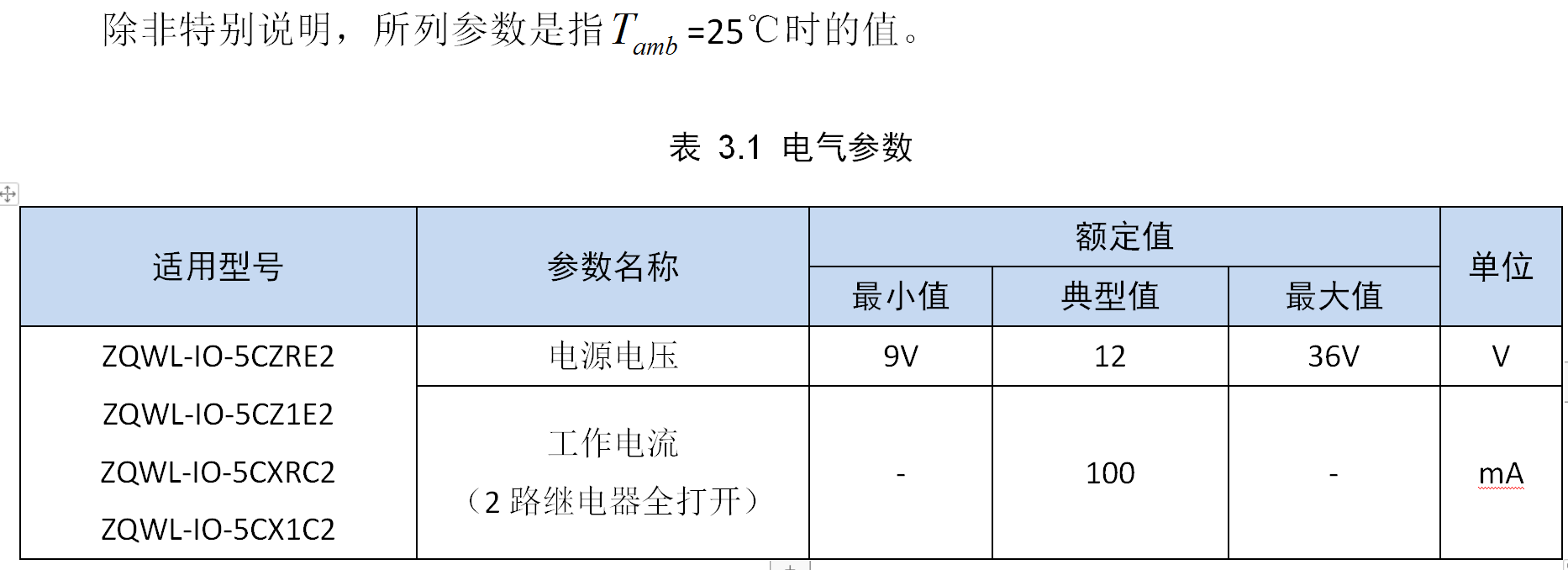
本小节除特别说明,所列参数均适用表1.1所示的型号。
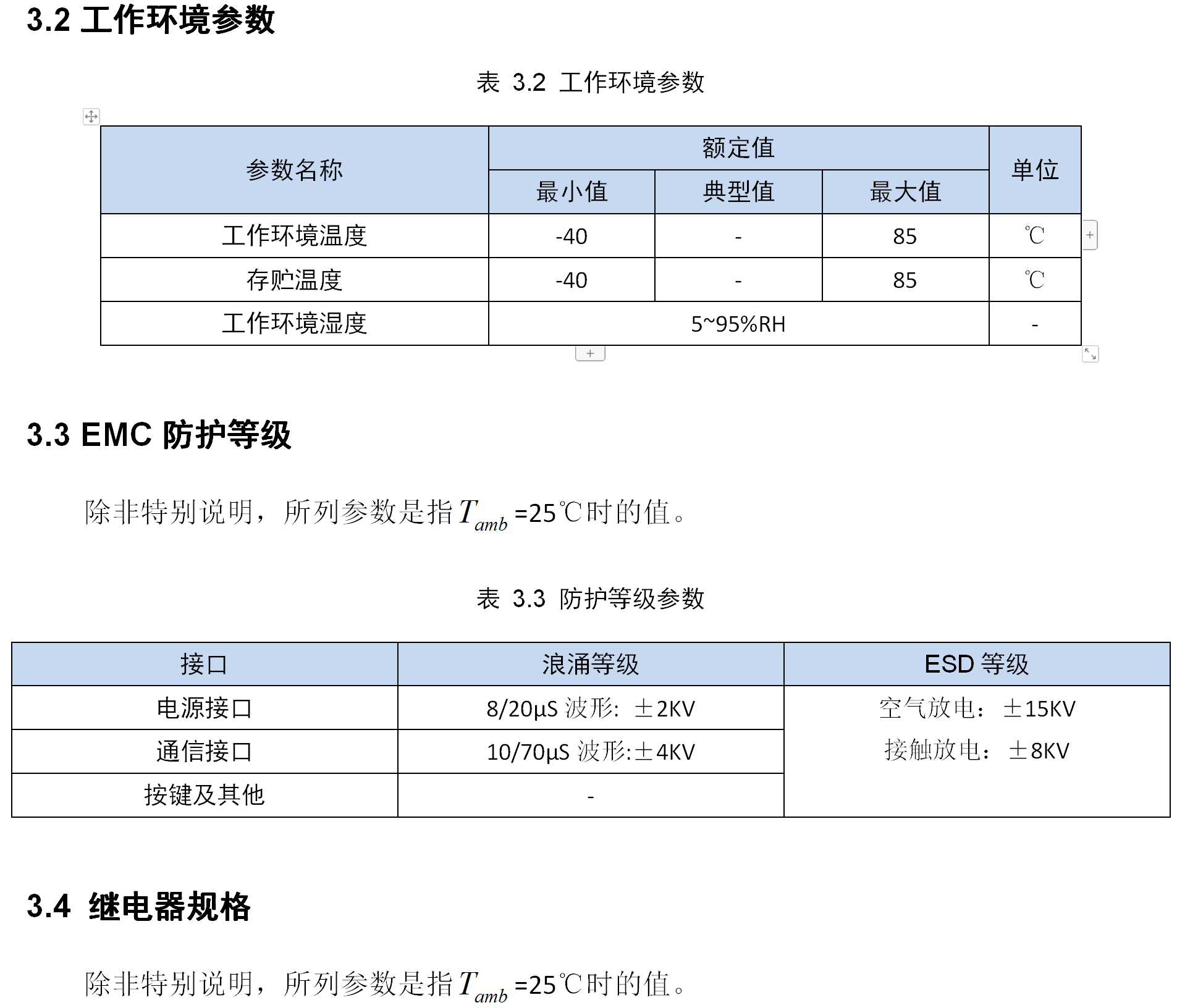
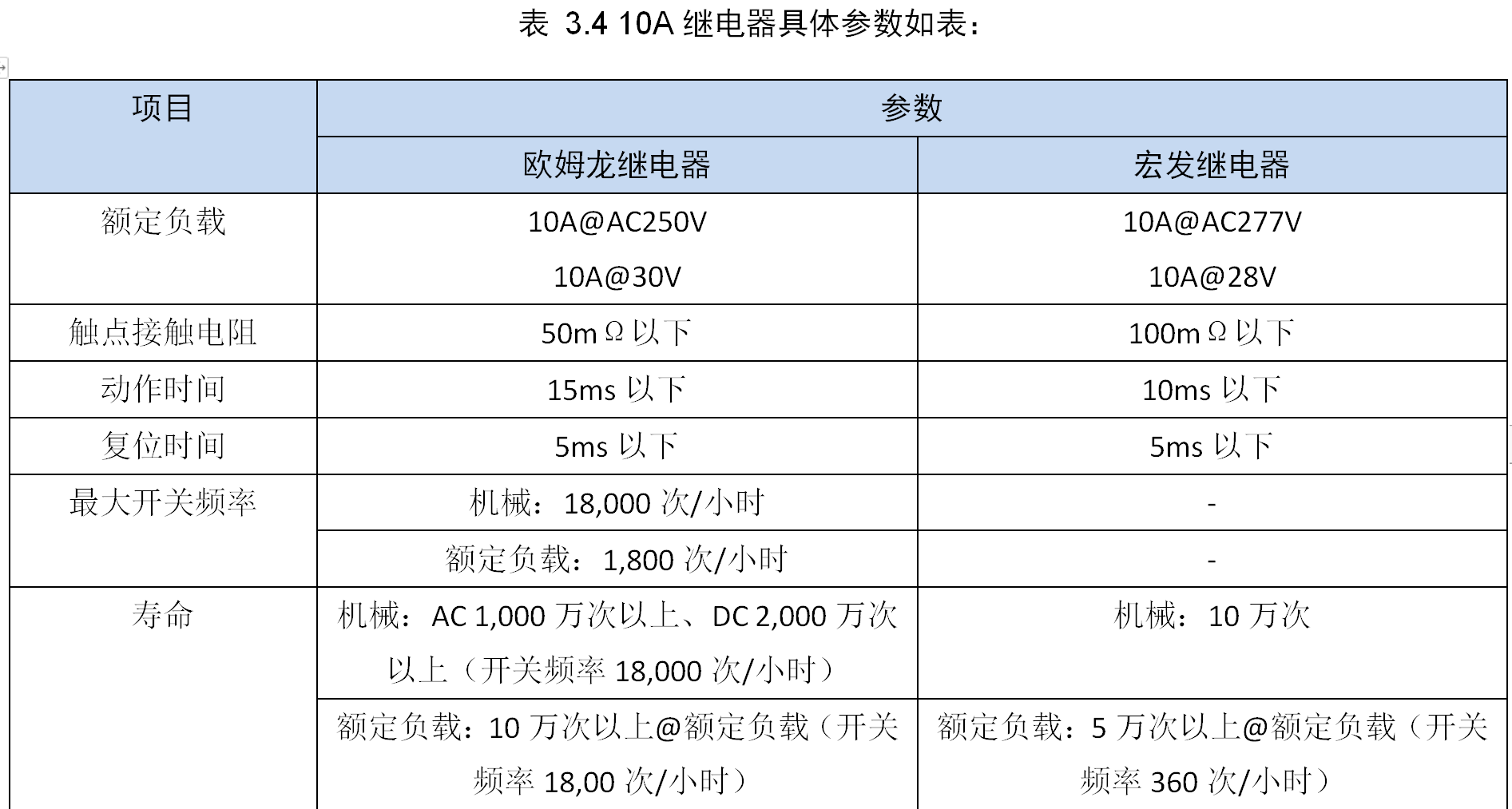
3.1电气参数
除非特别说明,所列参数是指
四、硬件接口及机械尺寸
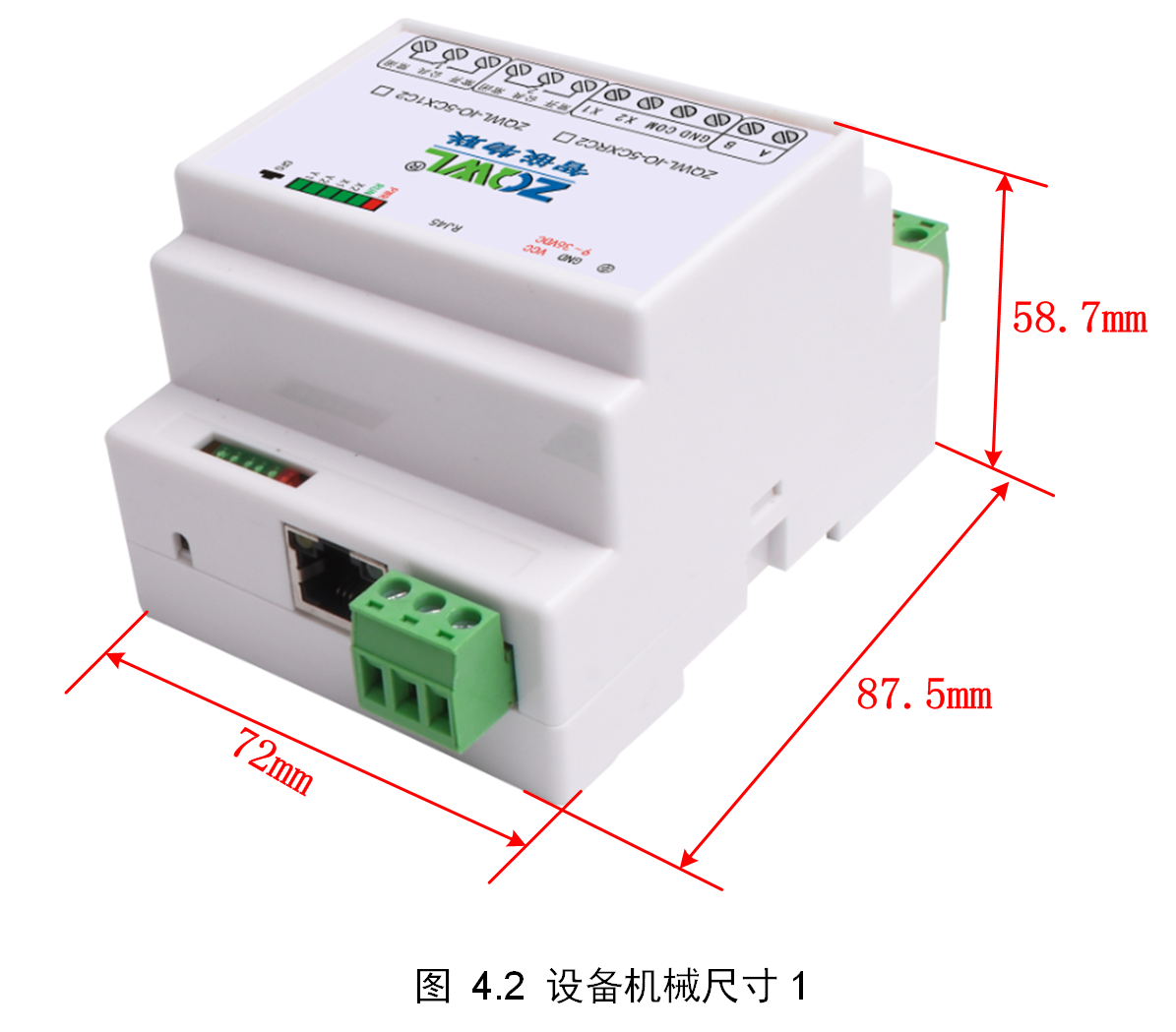
4.1产品接口布局
4.1.1ZQWL-IO-5CXRC2、ZQWL-IO-5CX1C2接口布局
4.1.2ZQWL-IO-5CZRE2、ZQWL-IO-5CZ1E2接口布局
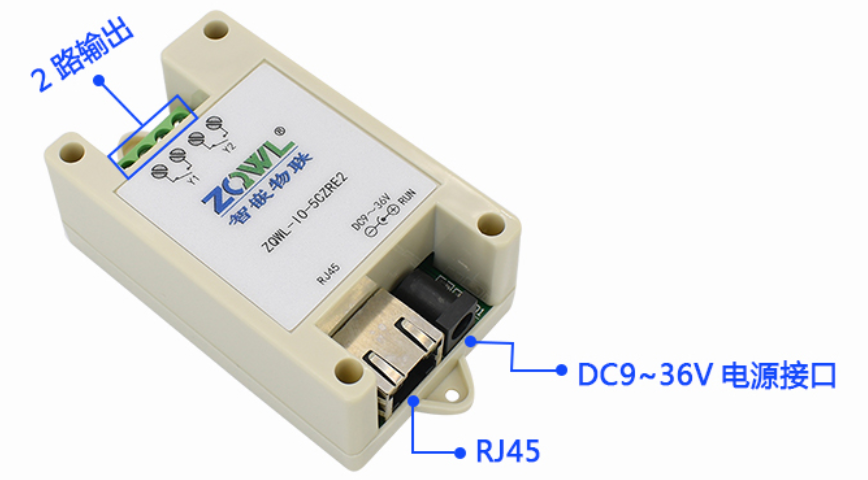
图4.3设备的接口布局2

图4.4设备机械尺寸2
4.2设备开关量输入
本小节适用型号:ZQWL-IO-5CXRC2、ZQWL-IO-5CX1C2。
本控制板共有4个开关量输入,支持干节点、湿节点、NPN、PNP的接线方法。
1.PNP输入接线
PNP型输入时,公共端“COM”为信号“地”(即共阴极,共负极),X1~X4输入高电平时,有信号,逻辑示意图如图4.5所示(以X1为例)。
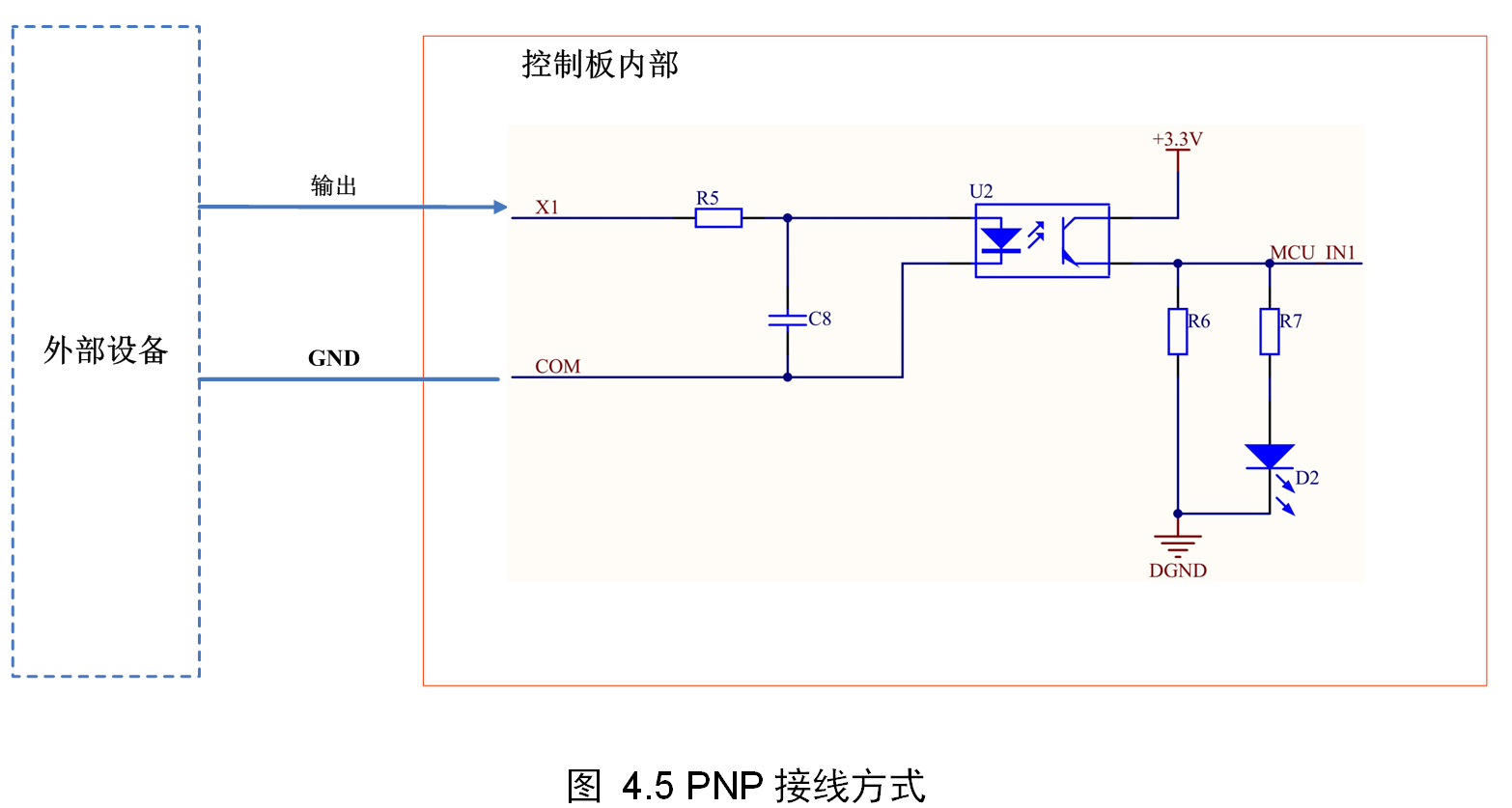
例如,COM接GND上,X1接到VCC上,则第一路输入有信号。
2.NPN输入接线
NPN型输入时,公共端“COM”接VCC(即共阳极,共正极),X1~X4输入低电平时,有信号,逻辑示意图如图4.6所示(以X1为例)。
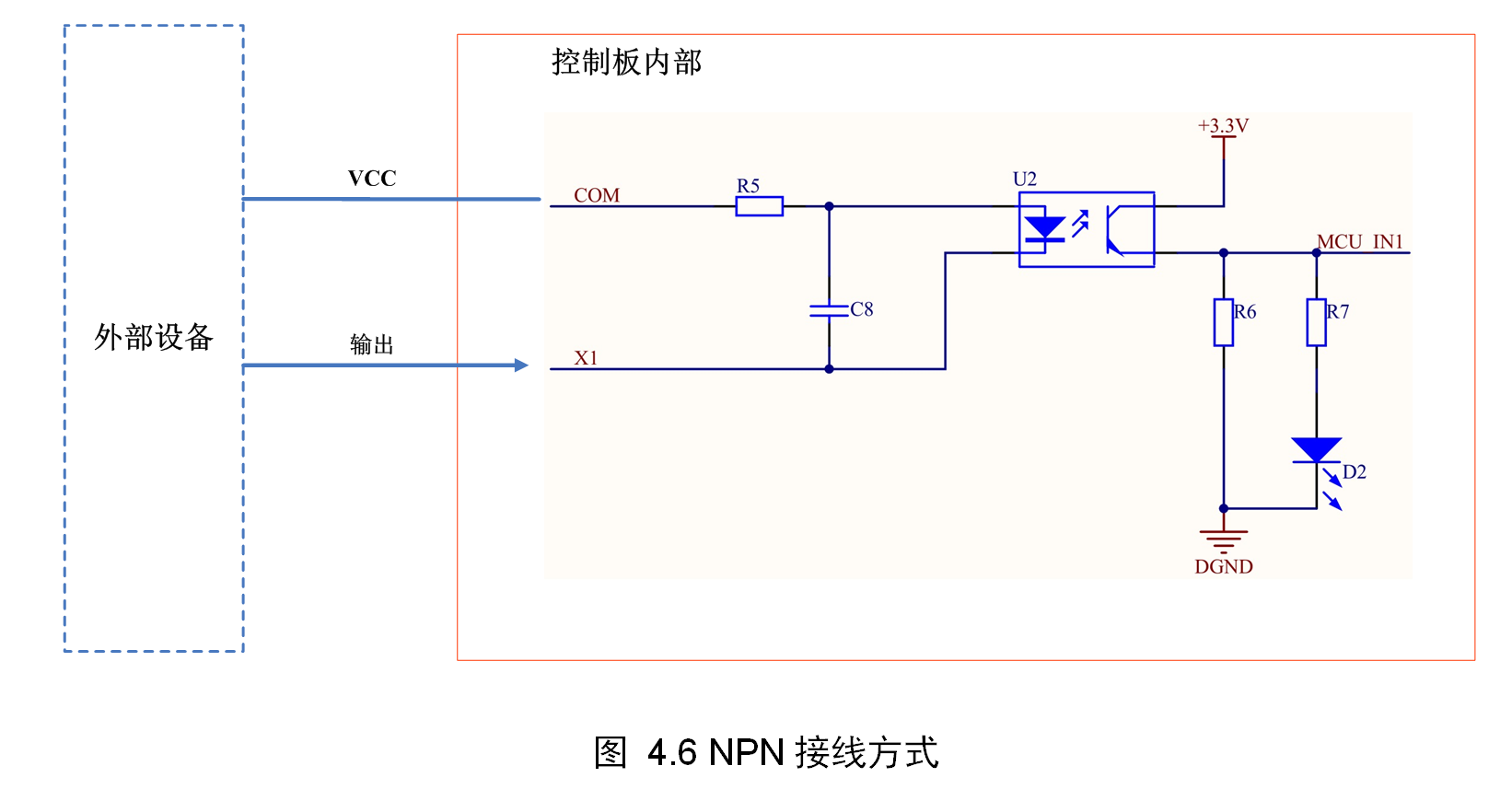
例如,COM接VCC上,X1接到GND上,则第一路输入有信号。
3.干节点接线
若用户需要检测的是无源开关信号,可以使用干节点的接线方式。
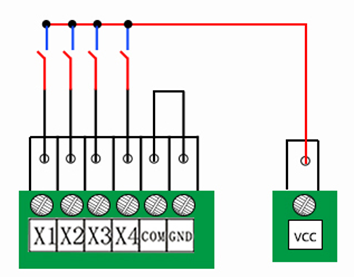
图4.7干节点接法
4.湿节点接线方式
若用户需要检测有源的开关信号,可以采用湿节点的接线方式。
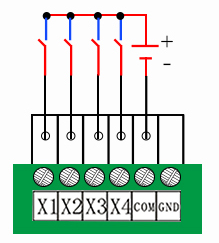
图4.8湿节点接法
4.3设备继电器输出接线
该设备共有4路继电器输出,每路都有常开、常闭和公共端三个触点,每路继电器的公共端触点互相独立,4路可以分别控制不同的电压,每个端子均有标示。
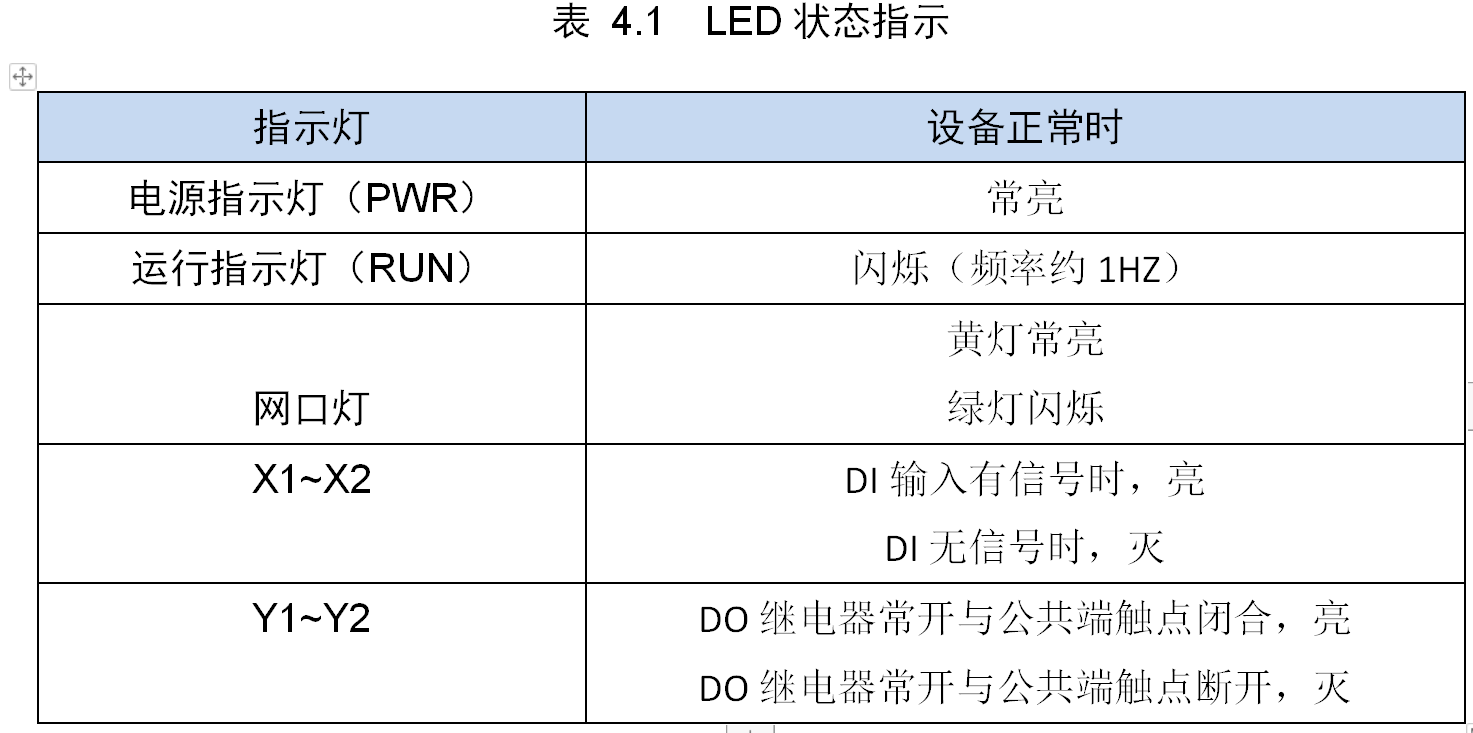
4.4指示灯
五、模块参数配置
本模块可以通过“智嵌串口服务器配置软件”以及网页的方式进行参数的配置。注意,模块只有重启后,新设置的参数才生效。
5.1智嵌网络IO配置软件
可以通过配置软件对模块的参数配置,可以配置的参数如下:模块IP,子网掩码,网关,DNS服务器,MAC地址(也可以采用出厂默认),1路RS485的参数;也可以通过配置软件对模块进行固件升级。
使用方法如下:
1.将模块通过网线和电脑或路由器连接,并给模块上电,SYS灯闪烁(约1Hz)表示模块启动正常。
2.基本参数设置
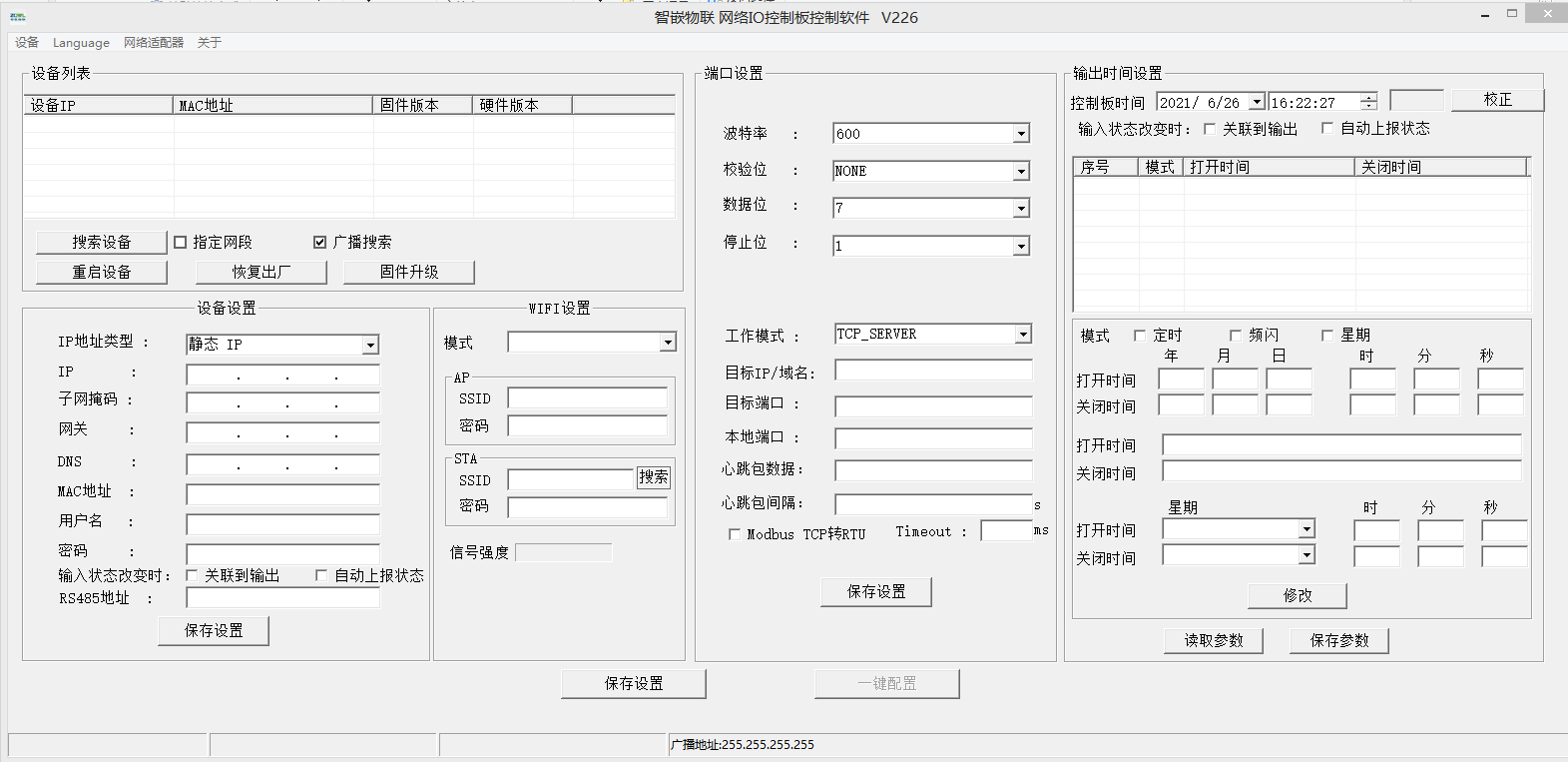
图5.1配置软件
3.点击上图中的“搜索设备”,如果搜索成功,设备列表中:
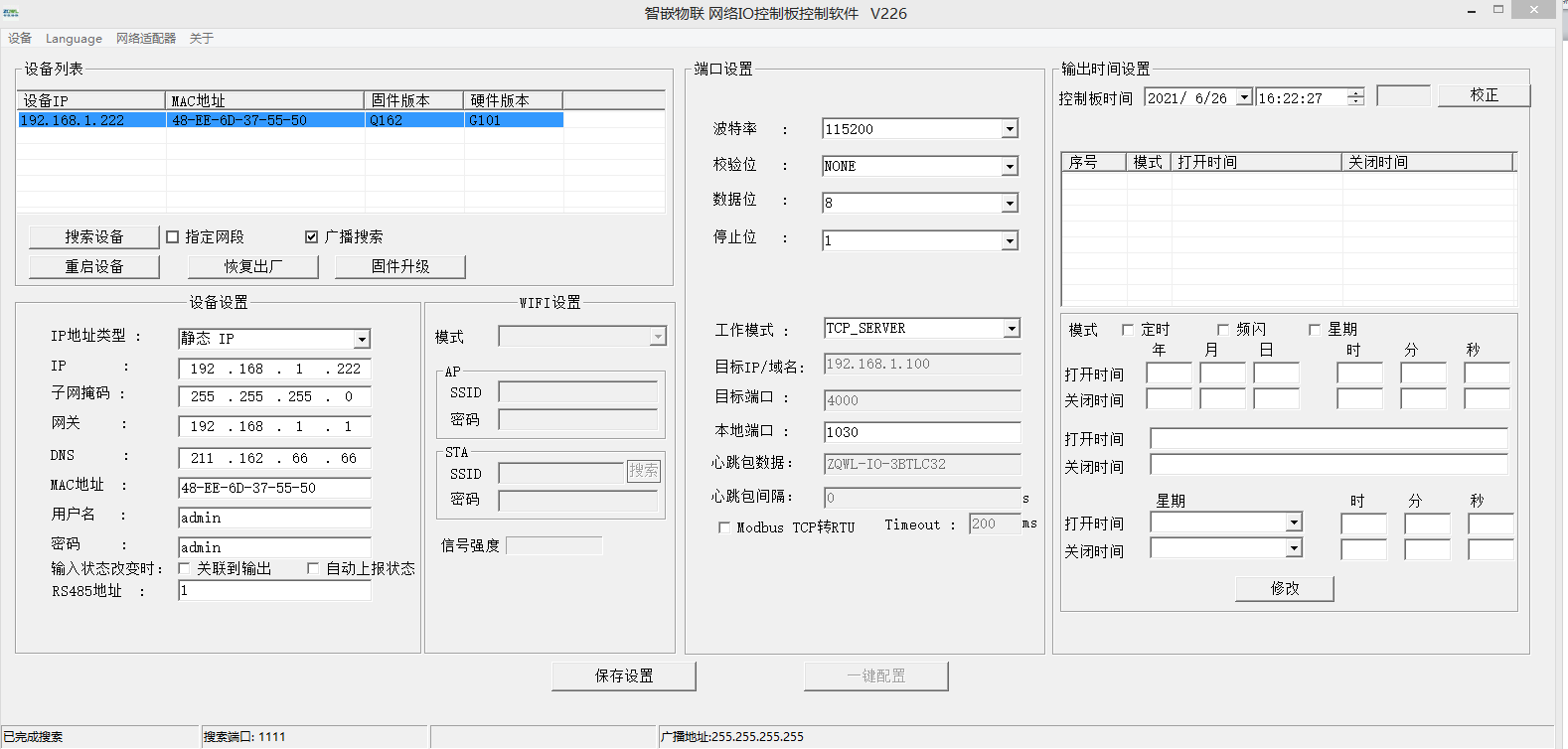
图5.2搜索设备
说明:
IP地址类型支持静态IP和动态IP;
MAC地址默认情况下由系统自行计算得到,保证每个模块不同(也可以由用户自行设定)。
波特率支持:600~460800bps。
工作模式支持:TCP_SERVER,TCP_CLIENT,UDP_SERVER,UDP_CLIENT。
该模块支持DNS功能,可以在目标IP/域名栏填写所要连接的域名网址。
用户名和密码是为网页配置登陆所用,默认用户名是admin,密码是admin,可以修改(用户名只能用配置软件修改,密码既可用配置修改也可以用网页修改)。
RS485地址:此处可设置设备本身的地址。
- 保存参数,重启设备
每次修改参数,均须保存设置后,重启设备。
5.2网页参数配置
网页配置提供中英文两个版本,如果要使用网页进行参数配置,首先要知道模块的IP,如果不慎忘记,可以拉按住“RESET”按钮,保持5秒以上,模块恢复出厂设置,此时模块的IP是:192.168.1.253。
1.系统登录
在浏览器中输入设备的IP地址(默认:192.168.1.253),回车,则出现配置网页,需要认证用户名和密码(和配置软件中的一致),初始用户名为:admin,初始密码为:admin。
中文版如图5.3所示,英文版如图5.4所示。
图5.3中文版系统登录
图5.4英文版系统登录
登陆成功后就可以对模块配置了。
2.IP地址配置
点击网页左侧的“模块IP配置”,出现如图5.5所示。
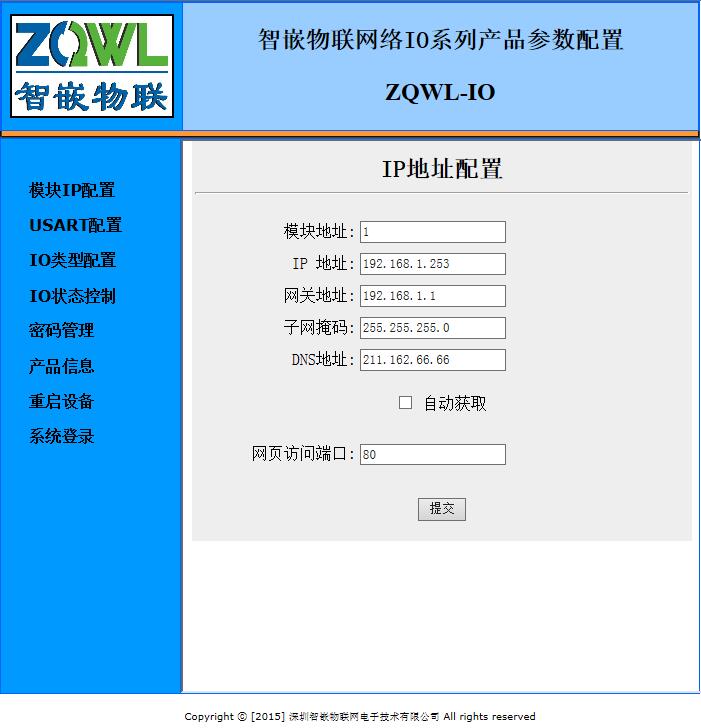
图5.5设备IP配置
在“IP地址配置”页面中,可以配置模块地址、IP信息、网页访问端口以及是否要使用自动获取IP,配置好后点击“提交”,注意需要重启后新配置的参数才能生效。
3.USART配置
点击网页左侧的“USART配置”,即RS485参数。出现如图5.6所示。
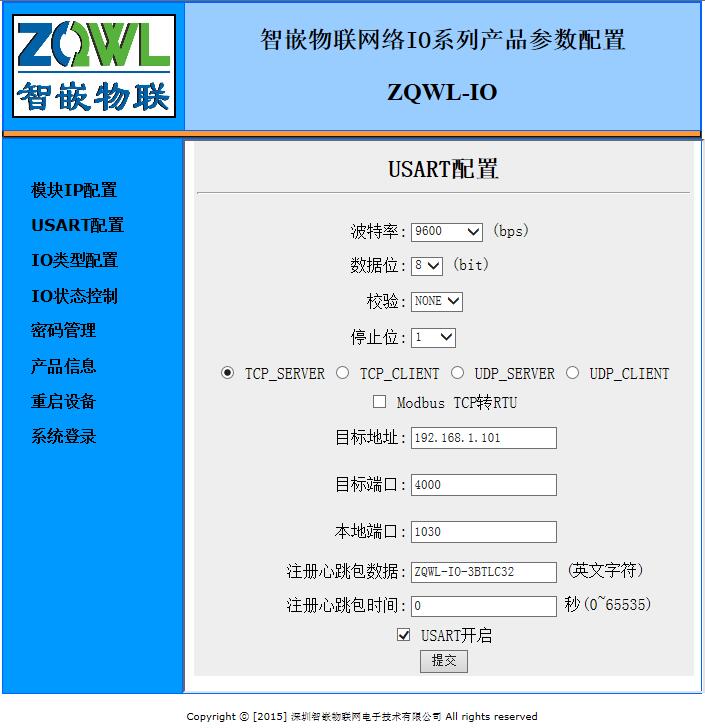
图5.6USART配置
说明:
在“USART配置”页面中,可以设置所需的USART参数:波特率、数据位、停止位以及校验位。
工作模式有4种:TCP_SERVER、TCP_CLIENT、UDP_SERVER、UDP_CLIENT。这4种模式只能任选1种。
当选择“TCP_SERVER”或“UDP_SERVER”模式后,“目标地址”和“目标端口”无意义。
当选择TCP_CLIENT或UDP_CLIENT后,“目标地址”和“目标端口”就是所要连接的目的设备地址。
注意当选用“Modbus TCP转RTU”功能时,工作模式必须选择“TCP_SERVER”;
“注册心跳包”含义:当工作模式选“TCP_CLIENT”模式时,如果“注册心跳包时间”不为0,则当TCP连接无数据交换时,模块自动向TCP服务器发送“注册心跳包数据”,发送时间间隔即为“注册心跳包时间”;如果“注册心跳包时间”设置为0,禁止心跳包功能。
4.用同样的方法可以分别打开“密码管理”、“产品信息”、“重启设备”、“系统登录”等页面,逐一对模块配置。
六、设备的高级功能
6.1心跳包
6.1.1心跳包
心跳包只能用在TCP_CLIENT模式下,用户可以根据需求设置心跳包数据和心跳包时间。当心跳包间隔设置为0或不勾选“启用心跳包”,心跳包功能不启用。
向服务器发送心跳包主要目的是为了保持连接稳定可靠,保证连接正常的同时还可以让服务器通过心跳包知道设备在线情况。用户可以选择让设备发送心跳包以实现特定的需求。
6.1.2注册包
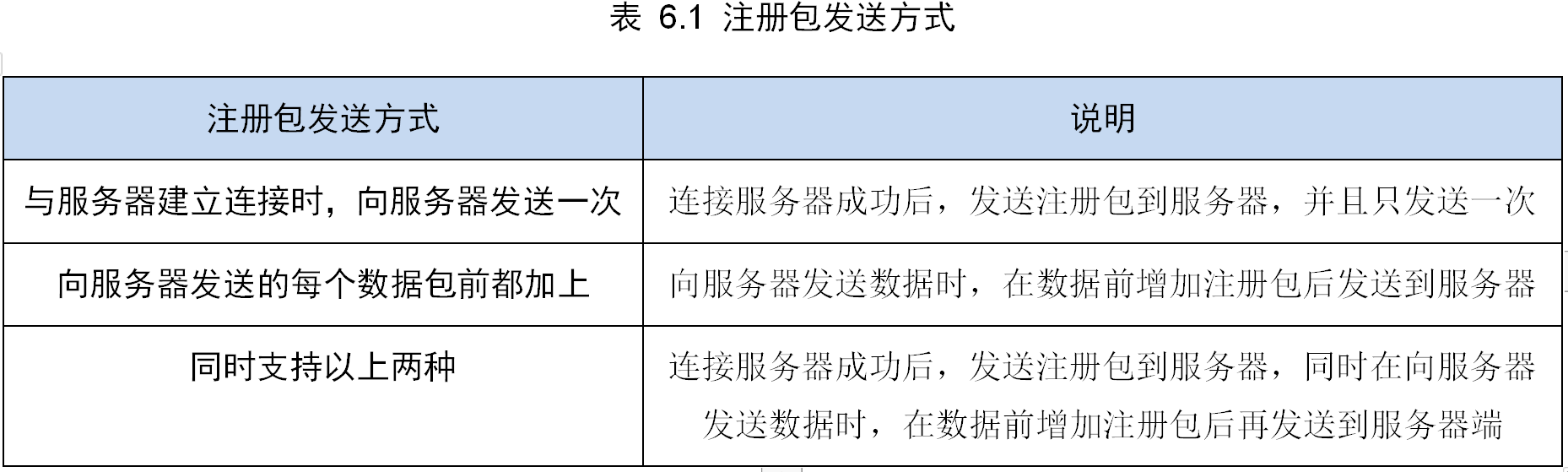
注册包只能用在TCP_CLIENT模式下,用户可以根据需求来设置注册包的发送方式和注册包数据,也可以不使用注册包功能。
注册包可以作为设备获取服务器功能的识别码,也可以作为数据包头,方便服务器识别数据来源。
设备支持三种注册包发送方式,如表6.1所示。
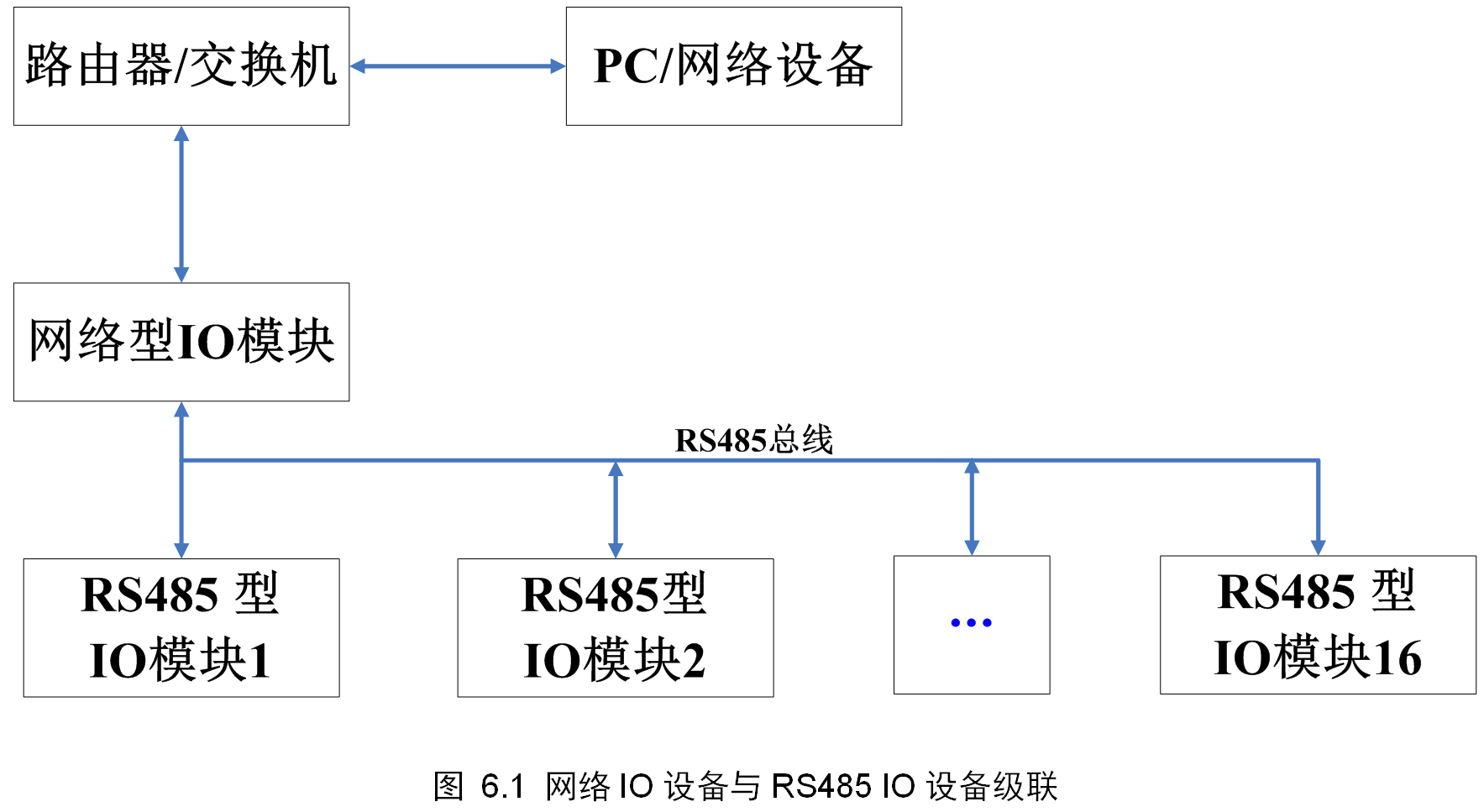
6.2设备级联控制
本小节适用型号:ZQWL-IO-5CXRC2、ZQWL-IO-5CX1C2。
该模块有1路RS485接口和1个RJ45接口,内置了网络与RS485数据透传以及Modbus TCP转RTU功能(即串口服务器功能)。可通过RS485接口实现与智嵌RS485型IO设备的级联,至少可级联32个,其拓扑结构如图6.1所示。
6.3设备DI输入状态自动上报
本小节适用型号:ZQWL-IO-5CXRC2、ZQWL-IO-5CX1C2。
当DI输入状态变化时,设备会将DI状态主动上报到服务器,设备默认不开启该功能,须通过配置软件使能“自动上报功能”,如图6.2所示。保存设置后,须重启设备,参数方可生效。
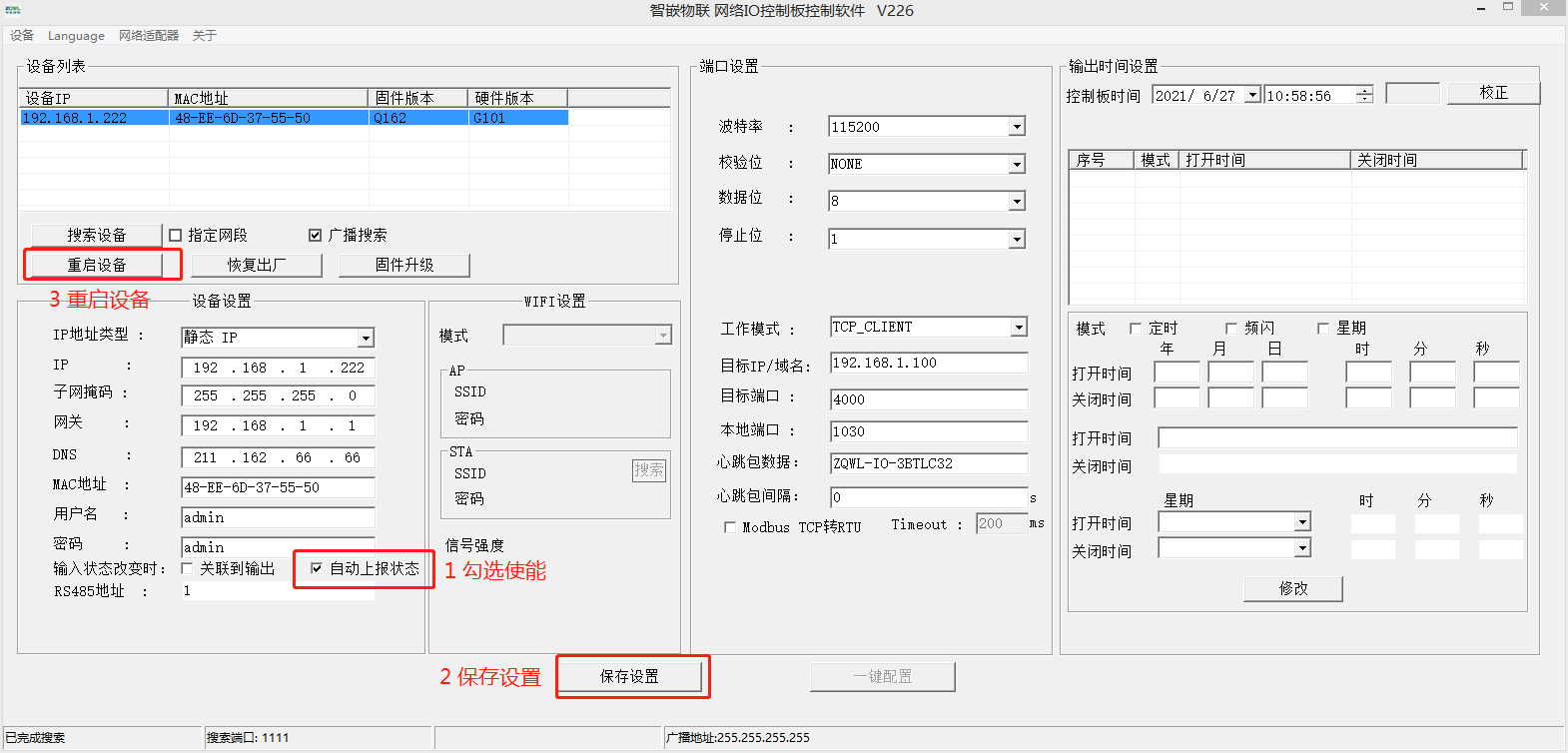
图6.2使能自动上报
6.4设备DI输入与DO输出联动
本小节适用型号:ZQWL-IO-5CXRC2、ZQWL-IO-5CX1C2。
DI输入联动DO输出功能:当DI输入有信号时,对应的DO继电器会做出对应的动作。
设备默认不开启该功能,须通过配置软件使能“关联到输出”,如图6.3所示。保存设置后,须重启设备,参数方可生效。
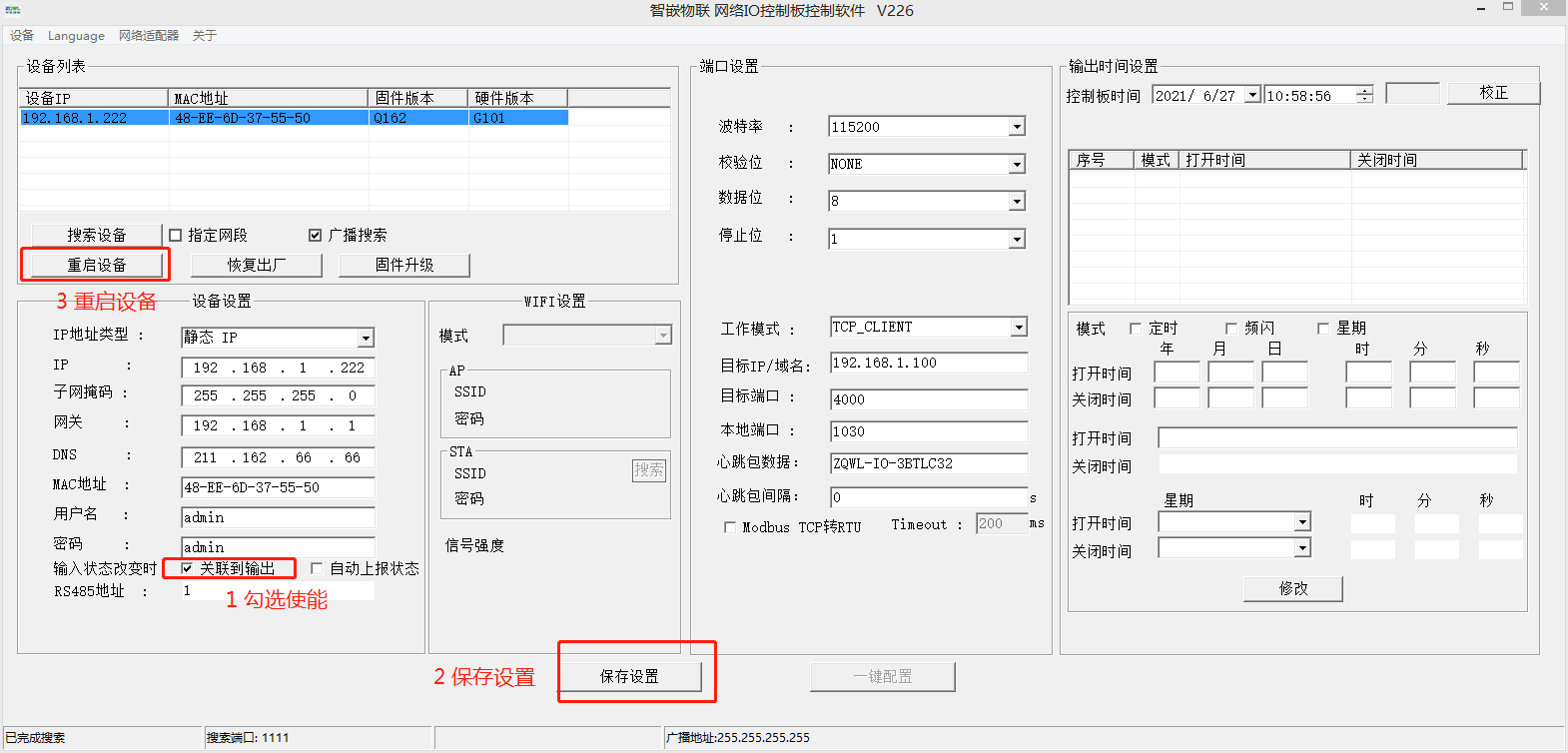
图6.3使能DI联动DO功能
6.5设备与设备之间联动
本小节适用型号:ZQWL-IO-5CXRC2、ZQWL-IO-5CX1C2。
两台设备之间通过简单的配置即可实现设备间联动,即设备A的DI输入信号可以控制设备B的DO继电器输出。
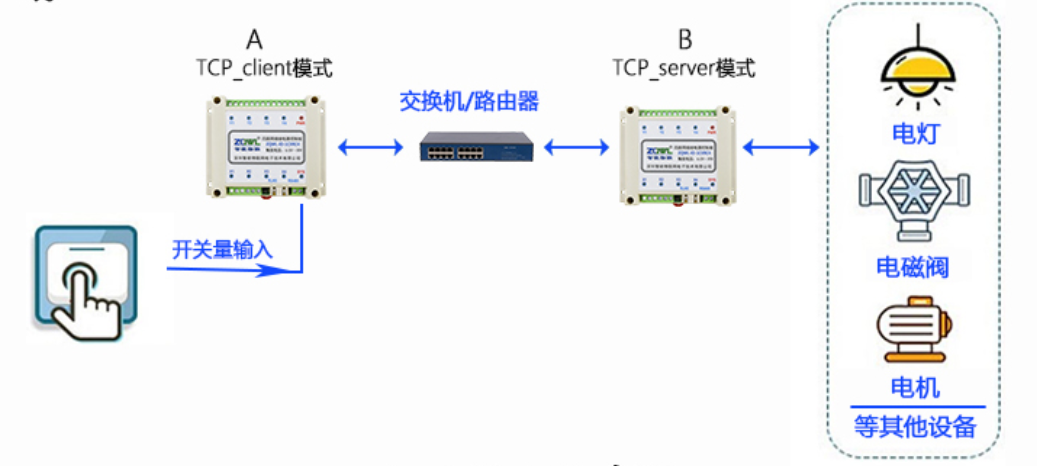
图6.4设备间联动
6.6延时断开控制
设备收到延时断开指令后,将对应的DO继电器常开触点与公共端触点闭合,并会返回控制板继电器状态,然后开始计时,到达用户设置的延时时间之后之后,将设备会将对应的继电器常开触点与公共端触点断开。
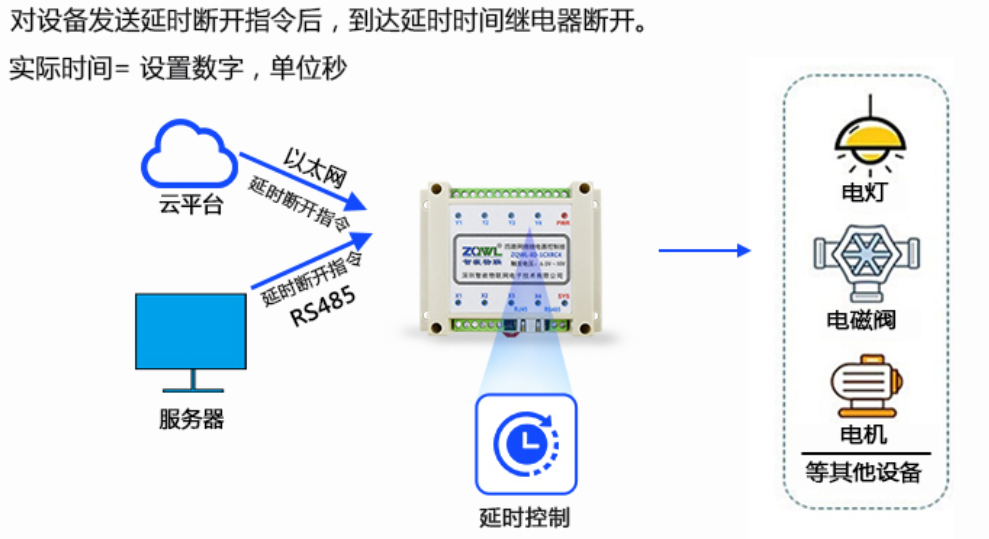
图6.5延时断开控制
6.7定时控制
设备支持8个定时器,用户可设置具体的时间以及循环周期,当到达用户设置的时间后,设备的DO继电器输出就会按照用户设置好的动作执行。目前仅支持手机APP设置定时时间。
该定时控制功能,仅云版本的网络设备支持,购买时请咨询客服。
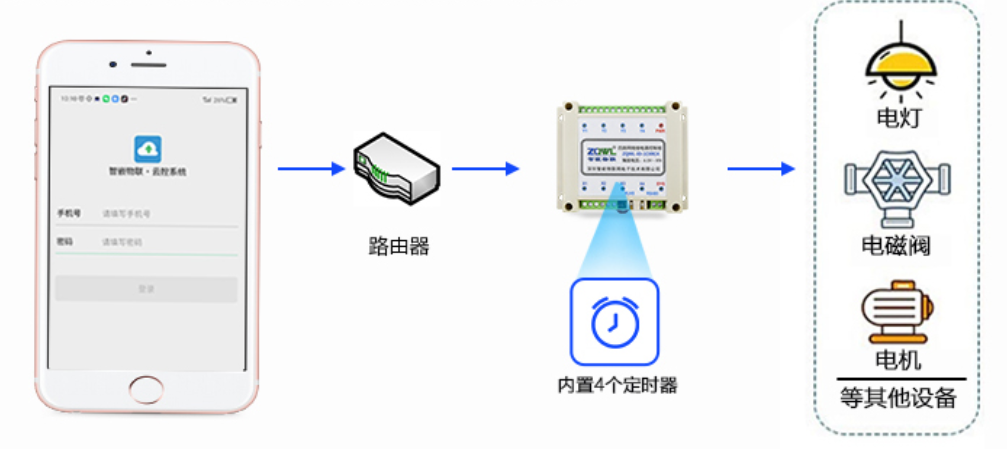
图6.6定时控制
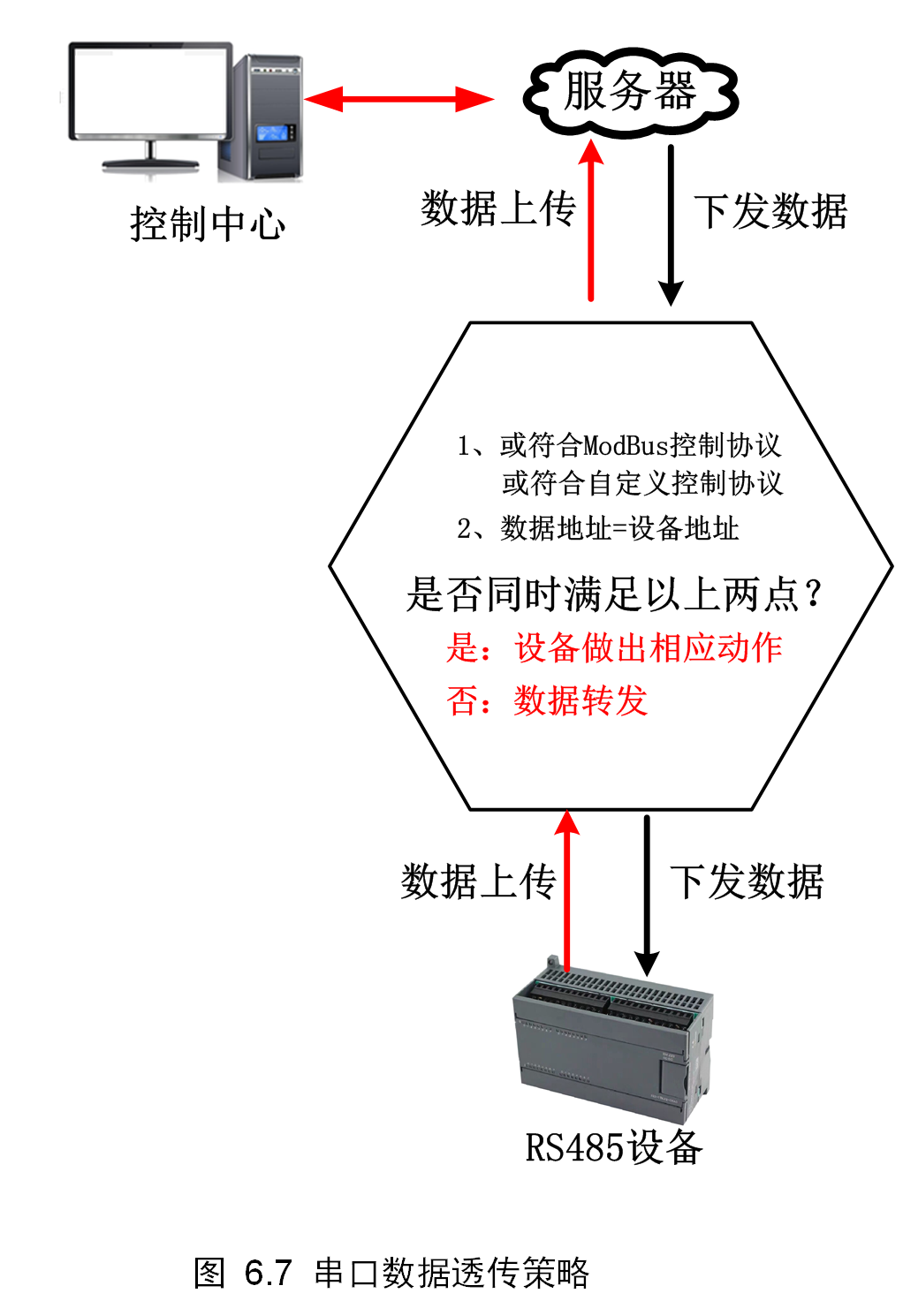
6.8串口服务器功能
设备支持RS485接口数据与网络之间的数据透传:设备接收到数据之后,首先解析是否符合设备的控制协议,若符合控制协议,则按照指令控制设备做出相应的动作;若不符合控制协议,则数据透传,如图6.7所示。控制协议具体详见第7章介绍。
七、模块通讯协议
该设备支持三种协议:Modbus TCP、Modbus RTU和自定义协议。
Modbus TCP协议仅适用于网络,使用该协议时必须启动“Modbus TCP转RTU”功能,如图7.1所示。
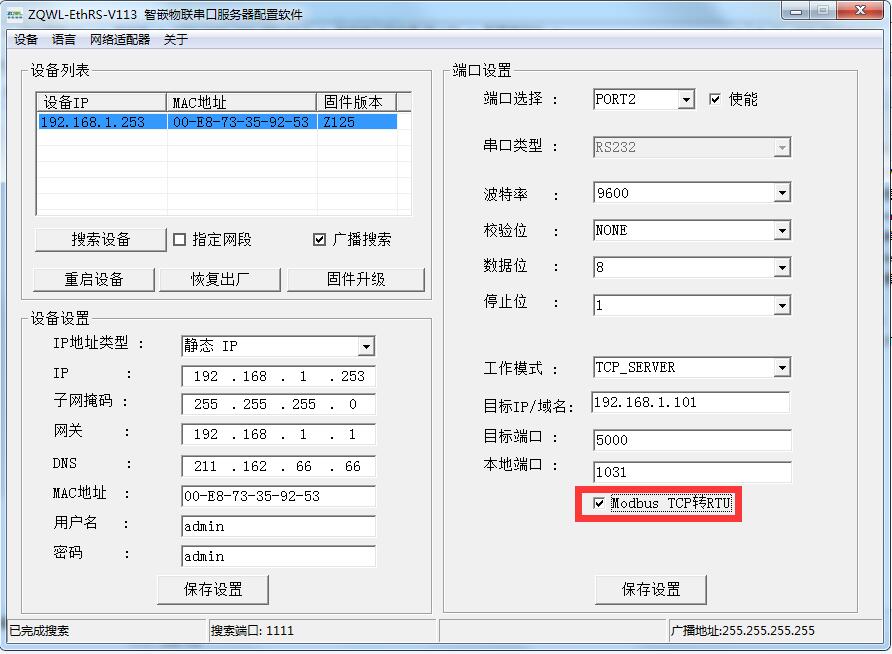
图7.1使能“Modbus TCP转RTU”功能
Modbus RTU和自定义协议对于网络和RS485都适用,若选用网络,必须不能启动“Modbus TCP转RTU”功能。
7.1自定义协议
自定义协议采用固定帧长(每帧15字节),采用十六进制格式,并具有帧头帧尾标识,该协议适用于“ZQWL-IO”系列带外壳产品。
该协议为“一问一答”形式,主机询问,控制板应答,只要符合该协议规范,每问必答。
该协议指令可分为两类:控制指令和配置指令。
控制指令:控制继电器状态和读取开关量输入状态。
配置指令类:配置设备参数以及复位等。
7.1.1控制指令
控制指令分为2种格式:一种是集中控制指令,一种是单路控制指令。
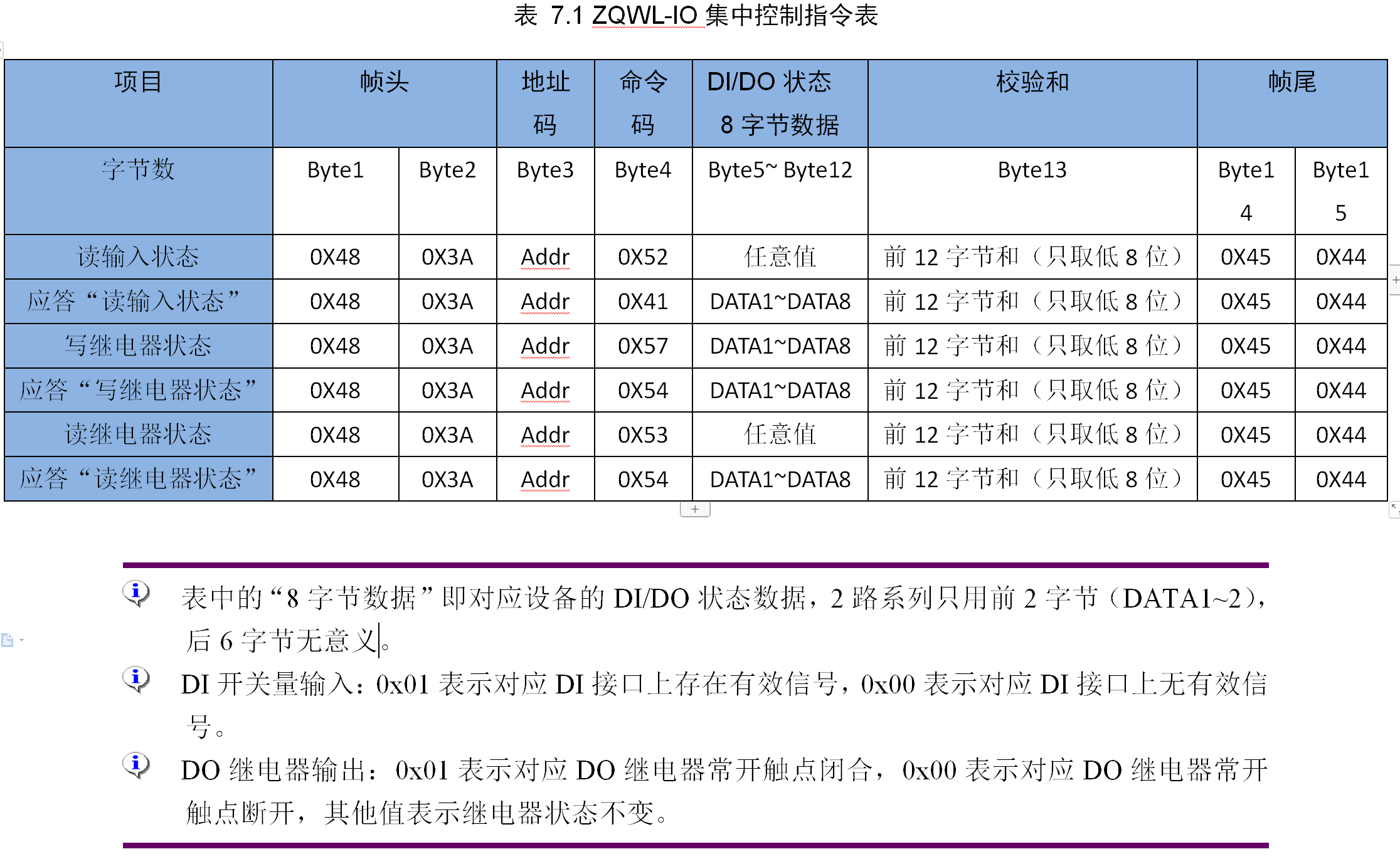
1.集中控制指令
此类指令帧长为15字节,可以实现对继电器的集中控制(一帧数据可以控制全部继电器状态)。详细集中控制指令如表7.1所示。
控制码举例(十六进制):
2.读取地址为1的控制板开关量输入状态:
发送:48 3a 01 52 00 00 00 00 00 00 00 00 d5 45 44 //读取设备开关量输入状态
地址为1的控制板收到上述指令后应答:
应答:48 3a 0141010100 0000 00 00 00c645 44 //应答设备开关量输入状态
此应答表明,控制板的X1和X2输入有信号(高电平)。
注意由于该控制板只有2路输入,在应答帧8字节数据的后6字节(00 0000 00 00 00)无意义,数值为随机。
3.向地址为1的控制板写继电器状态:
发送:48 3a 01 57 01 01000000000000dc45 44
此命令码的含义是令地址为1的控制板的第1个和第2个继电器常开触点闭合,常闭触点断开;注意继电器板只识别0和1,其他数据不做任何动作,所以如果不想让某一路动作,可以将该路赋为其他值。例如只让第1路动作,另外一路不动作,可以发如下指令:
发送:48 3a 01 57 0102000000000000dd45 44
只需要将第2路置为0x02(或其他值)即可。
控制板收到以上命令后,会返回控制板继电器状态:
应答:48 3a 01 5401 01000000000000d945 44
4.单路控制指令
此类指令帧长为10字节,可以实现对单路继电器的控制(一帧数据只能控制一个继电器状态)。此类指令也可以实现继电器的延时断开功能。
详细指令如表7.2所示。
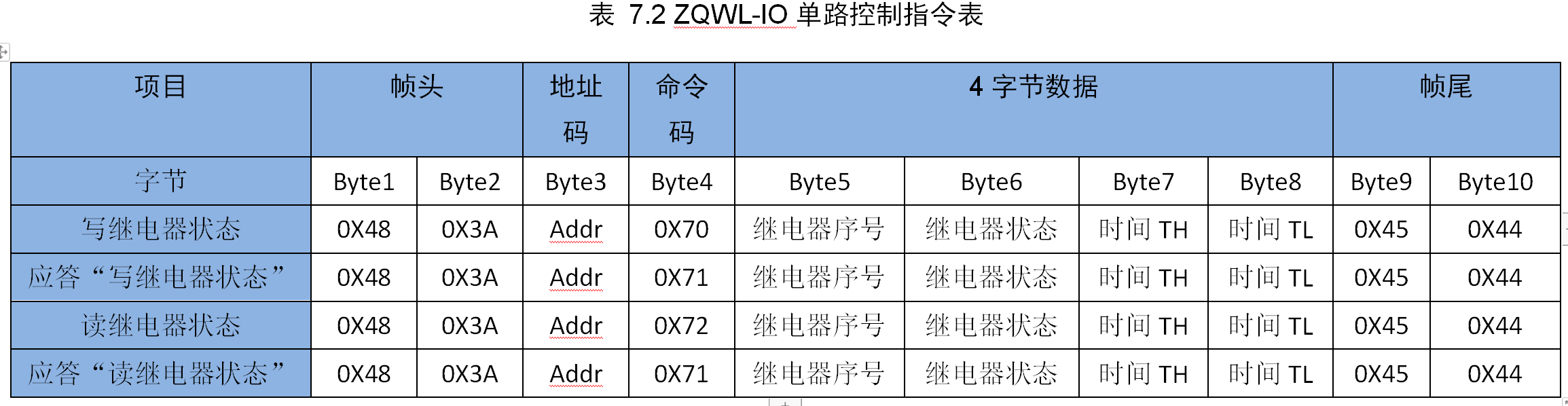
说明:
Byte3是控制板的地址,取值范围0x00~0xfe,用户可以通过配置指令来设置地址码;
Byte5是要操作的继电器序号,取值范围是1到2(对应十六进制为0x01到0x02);
Byte6为要操作的继电器状态:0x00为常闭触点闭合常开触点断开,0x01为常闭触点断开常开触点闭合,其他值为继电器保持原来状态;
Byte7和Byte8为延时时间T(收到Byte6为0x01时开始计时,延时结束后关闭该路继电器输出),延时单位为秒,Byte7是时间高字节TH,Byte8是时间低字节TL。例如延时10分钟后关闭继电器,则:
时间T=10分钟=600秒,换算成十六进制为0x0258,所以TH=0x 02,TL=0x 58。
如果Byte7和Byte8都填0x00,则不启用延时关闭功能(即继电器闭合后不会主动断开)。
单路命令码举例(十六进制):
5.将地址为1的控制板的第1路继电器打开:
发送:48 3a 01 70 01 01 00 00 45 44 //设备收到该命令后,将第1路继电器常闭触点断开,常开触点闭合
应答:48 3a 01 70 01 01 00 00 45 44 //应答第一路继电器状态
6.将地址为1的控制板的第1个继电器关闭:
发送:48 3a 01 70 01 0000 00 45 44 //设备收到该命令后,将第1路继电器常闭触点闭合,常开触点断开
应答:48 3A 01 71 01 00 00 00 45 44 //应答第一路继电器状态
7.将地址为1的控制板的第1路继电器打开延时10分钟后关闭:
发送:48 3a 01 70 01 01 025845 44
控制板收到以上命令后,将第1路的继电器常闭触点断开,常开触点闭合,并会返回控制板继电器状态,然后开始计时,10分钟之后将第一路的继电器常闭触点闭合,常开断开。
8.将地址为1的控制板的第1路继电器打开延时5秒后关闭:
发送:48 3a 01 70 01 01 000545 44
控制板收到以上命令后,将第1路的继电器常闭触点断开,常开触点闭合,并会返回控制板继电器状态,然后开始计时,5秒之后将第一路的继电器常闭触点闭合,常开断开。
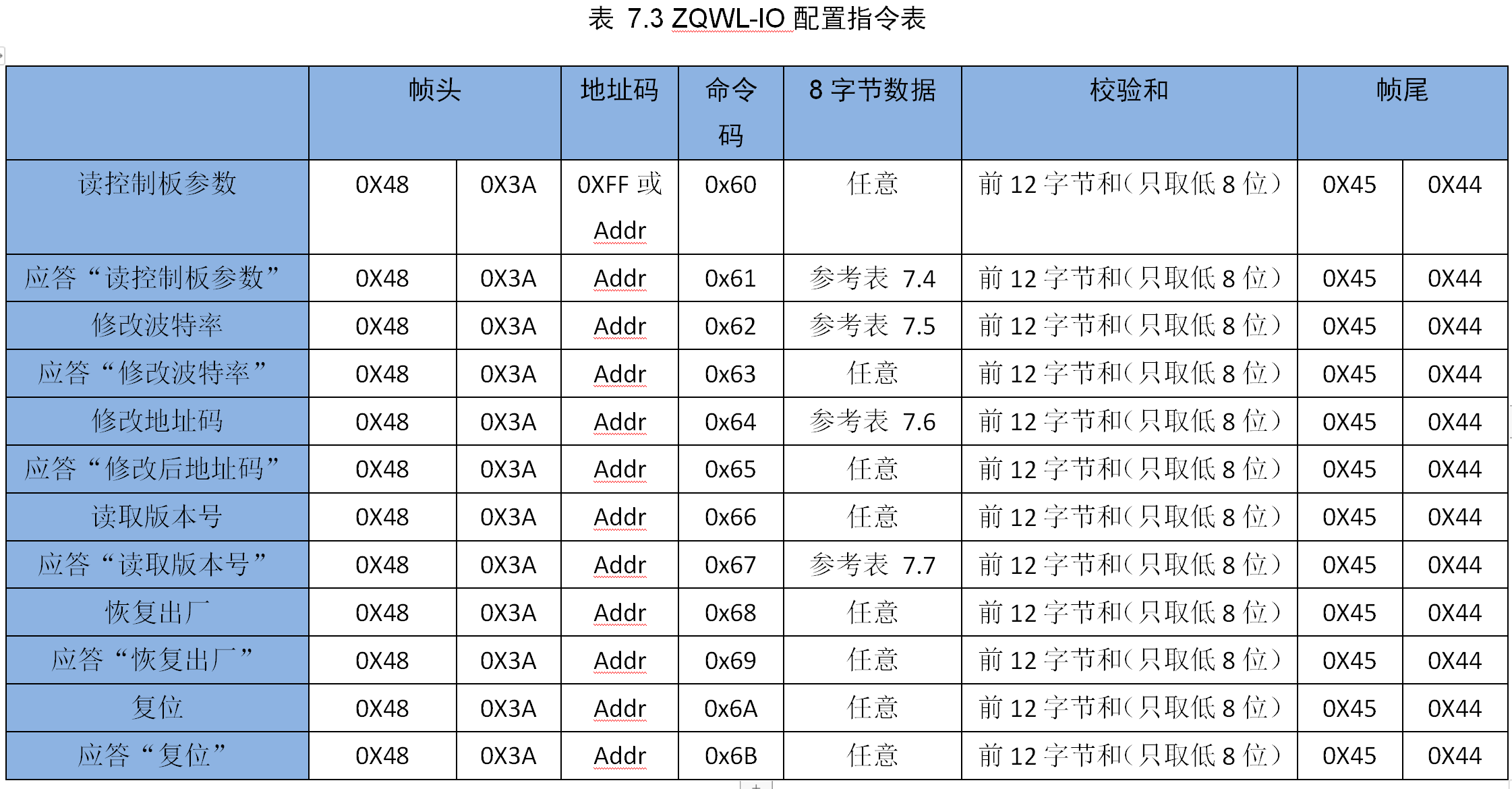
7.1.2配置指令
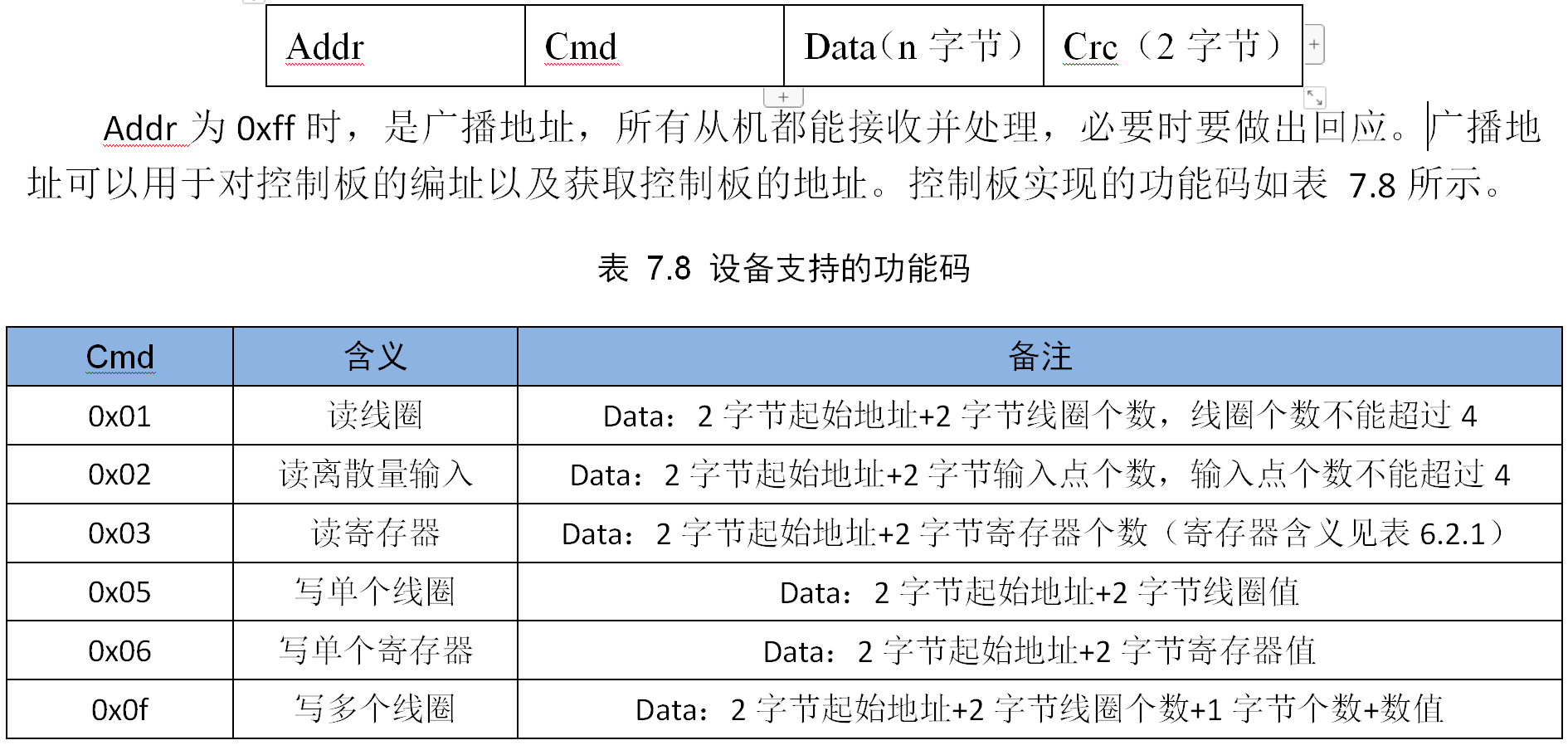
当地址码为0xff时为广播地址,只有“读控制板参数”命令使用广播地址,其他都不能使用。
7.2Modbus rtu协议
本控制板实现部分必要的modbus rtu协议,通讯格式如下:
注意:使用协议修改控制板参数时(波特率、地址),如果不慎操作错误而导致无法通讯时,可以按住“RESET”按键并保持5秒,等到“SYS”指示灯快闪时(10Hz左右),松开按键,此时控制板恢复出厂参数,如下:
串口参数:波特率115200;数据位8;不校验;1位停止位;
控制板地址:1。
7.3Modbus rtu指令码举例
以地址码addr为0x01为例说明。
1.读线圈(功能码:0x01)
该指令是读取继电器装态,为方便和高效,建议一次读取所有继电器的状态。
外部设备请求帧:
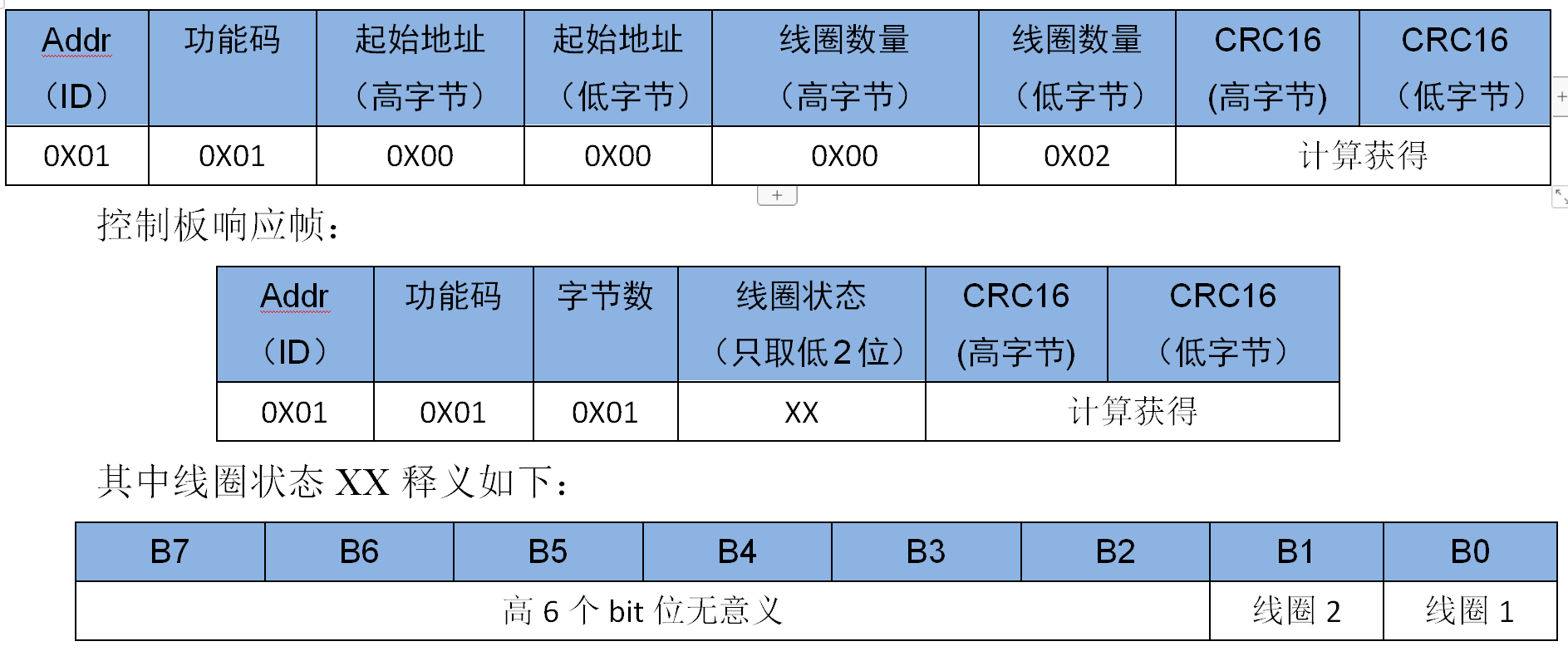
说明:
B0~B1分别代表控制板2个继电器状态(Y1~Y2)。
1代表继电器常开触点闭合,常闭触点断开。
0代表继电器常开触点断开,常闭触点闭合。
其他值,无意义。
2.读离散量输入(功能码:0x02)
该指令是读取设备的开关量输入状态,为方便和高效,建议一次读取所有输入量的状态。
外部设备请求帧:
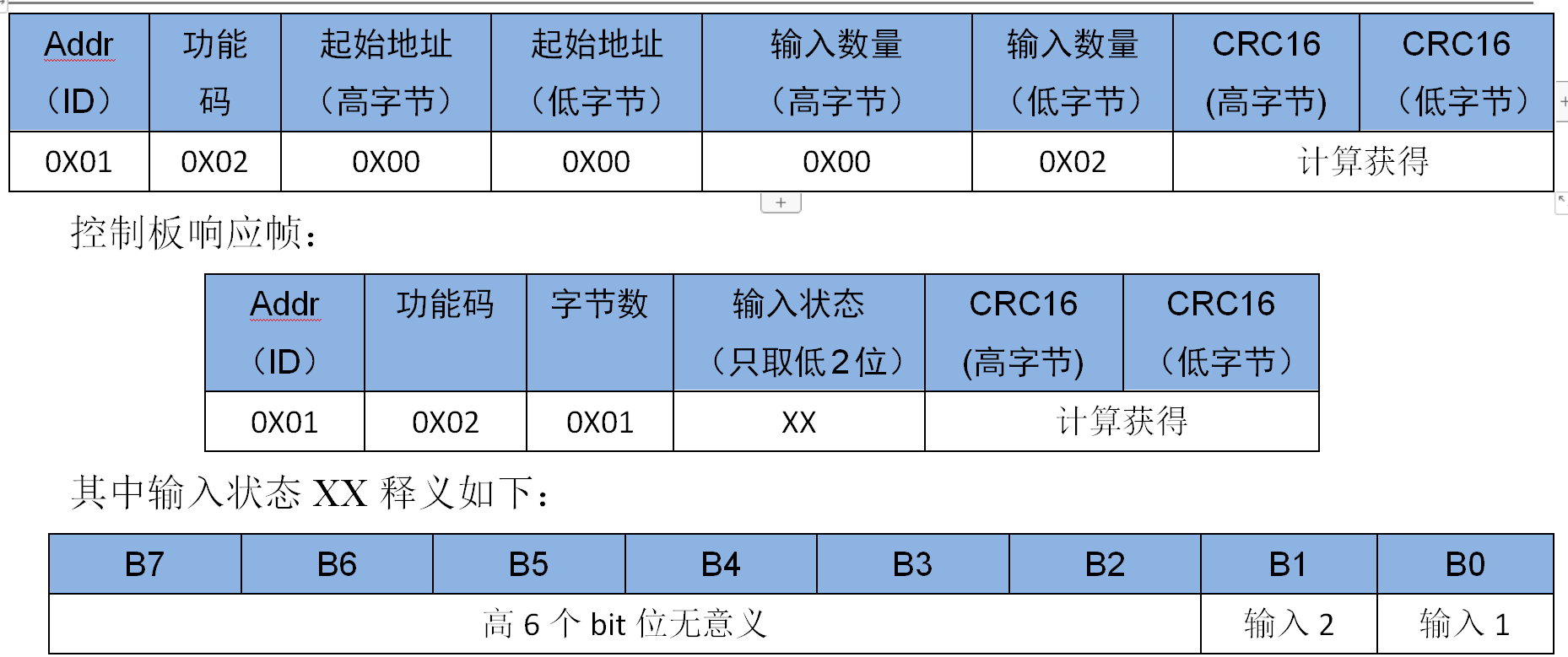
说明:
B0~B1分别代表控制板2个开关量输入状态(X1~X2)。
1代表输入接口存在有效信号。
0代表输入无有效信号。
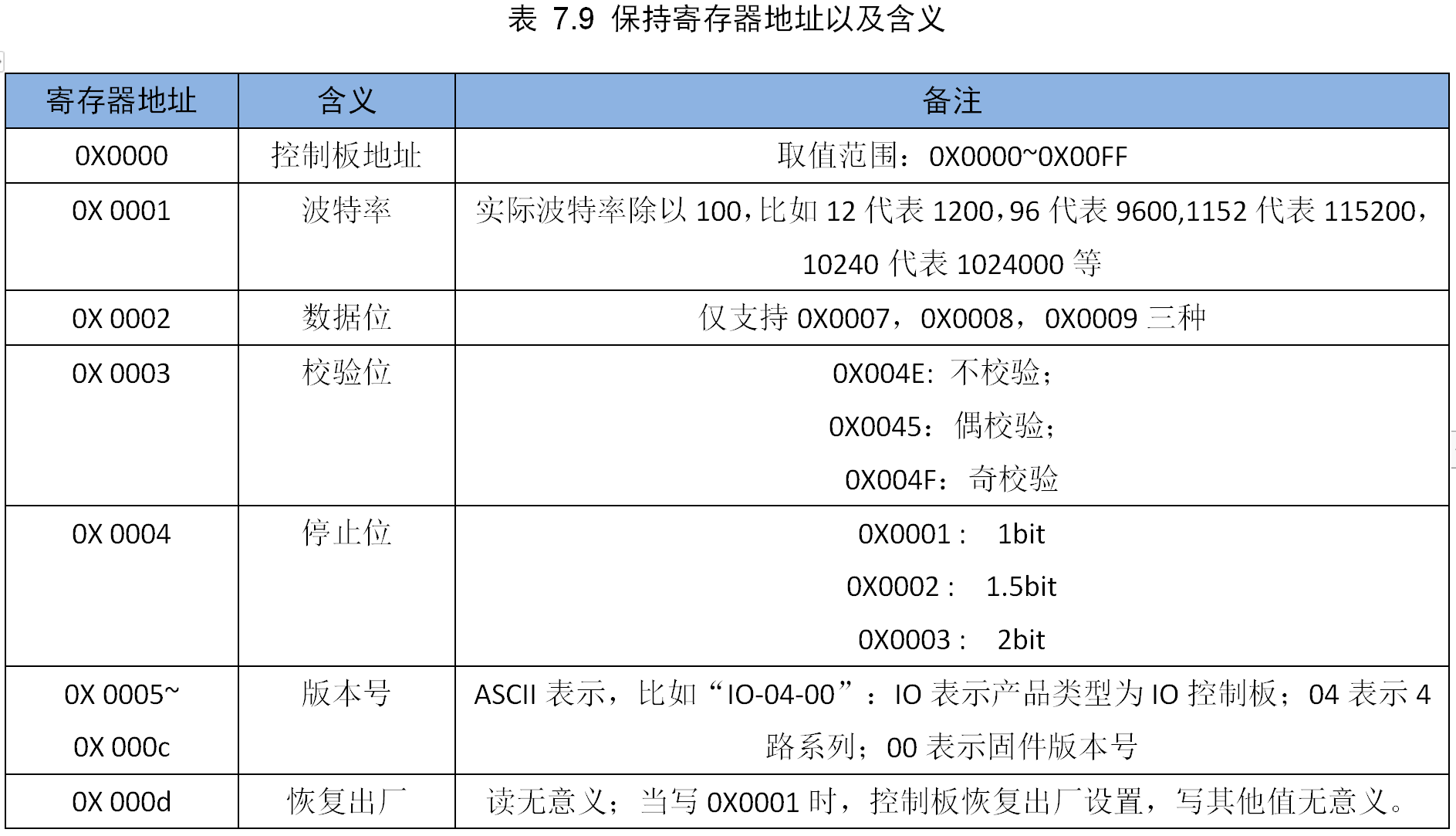
3.读寄存器(功能码:0x03)
寄存器地址从0x0000到0x000e,一共15个寄存器。其含义参见错误!未找到引用源。所示。
建议一次读取全部寄存器。
外部设备请求帧:
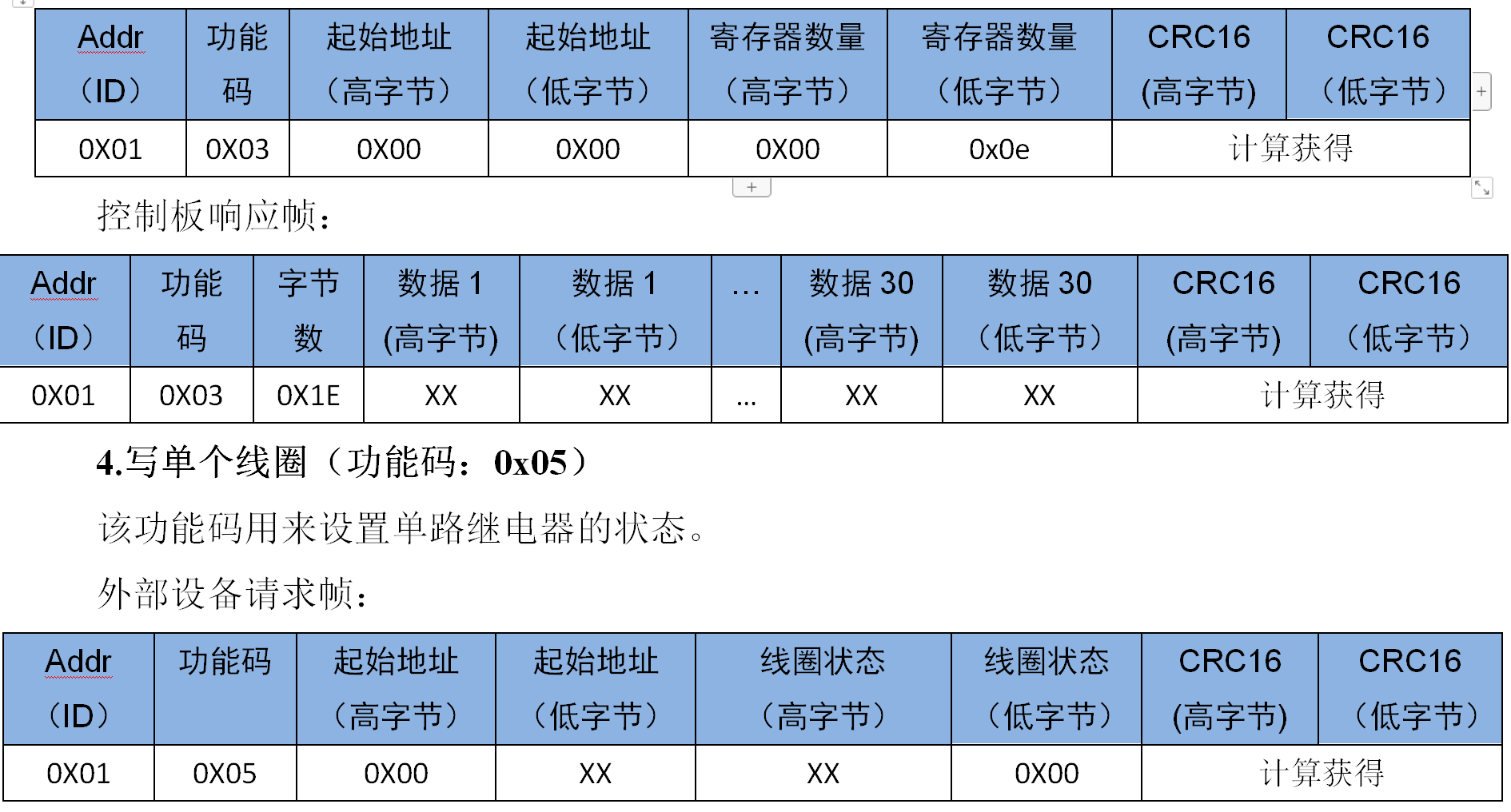
注意:起始地址(低字节)取值范围是0X00~0X01分别对应控制板的2个继电器(Y1~Y2);线圈状态(高字节)为0XFF时,对应的继电器常开触点闭合,常闭触点断开;
线圈状态(高字节)为0X00时,对应的继电器常开触点断开,常闭触点闭合。
线圈状态(高字节)为其他值时,继电器状态保持不变。
控制板响应帧:

5.写单个寄存器(功能码:0x06)
用此功能码既可以配置控制板的地址、波特率等参数,也可以复位控制板和恢复出厂设置。
注意:使用协议修改控制板参数时(波特率、地址),如果不慎操作错误而导致无法通讯时,可以按住“RESET”按键并保持5秒,等到“SYS”指示灯快闪时(10Hz左右),松开按键,此时控制板恢复出厂参数,如下:
串口参数:波特率115200;数据位8;不校验;1位停止位;
控制板地址:1。
外部设备请求帧:
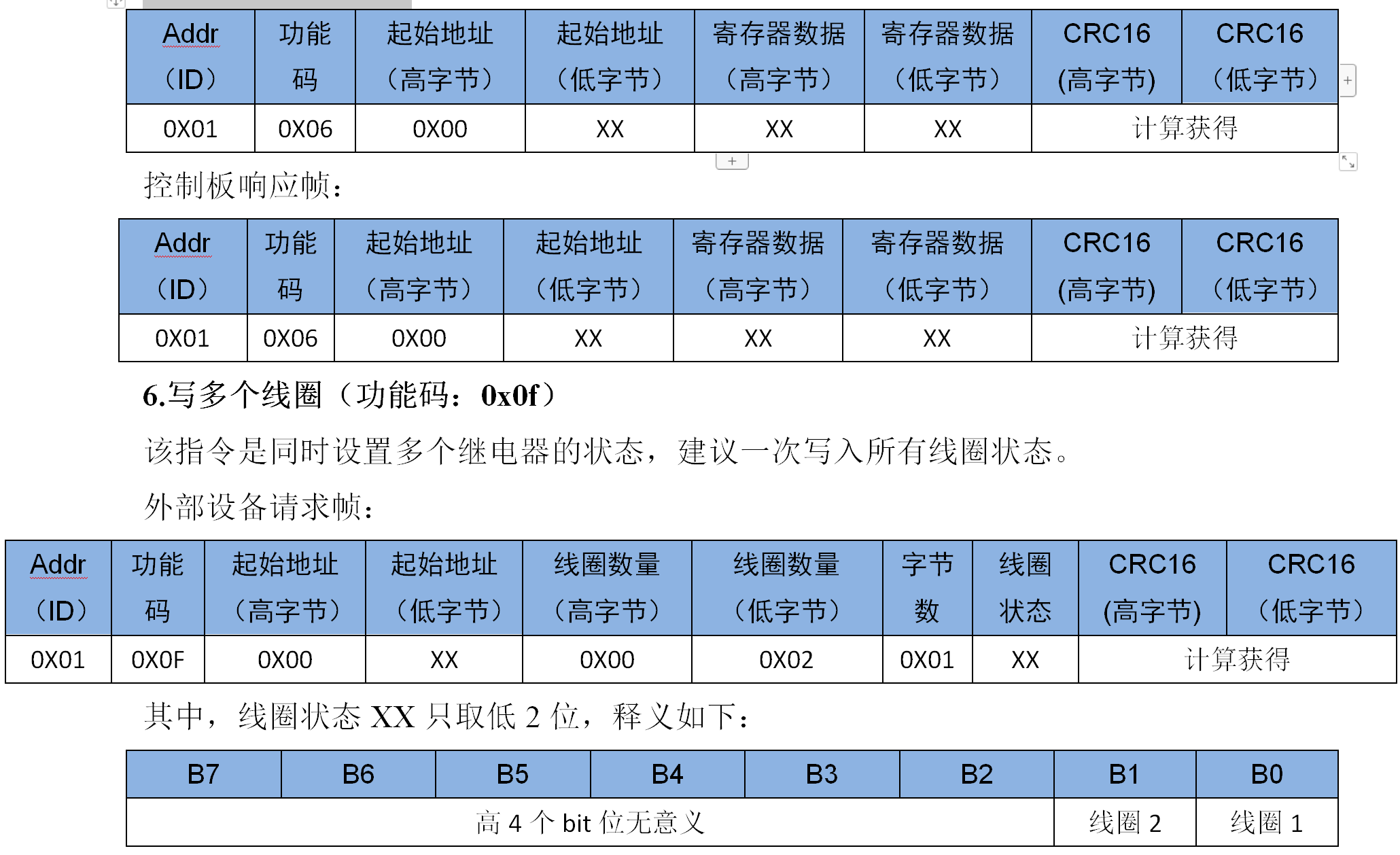
说明:
B0~B1分别对应控制板的2个继电器Y1~Y2。
1代表继电器常开触点闭合,常闭触点断开。
0代表继电器常开触点断开,常闭触点闭合。
控制板响应帧:

7.4Modbus TCP协议
Modbus TCP数据帧包含报文头、功能代码和数据3部分(功能码和数据与RTU相同):
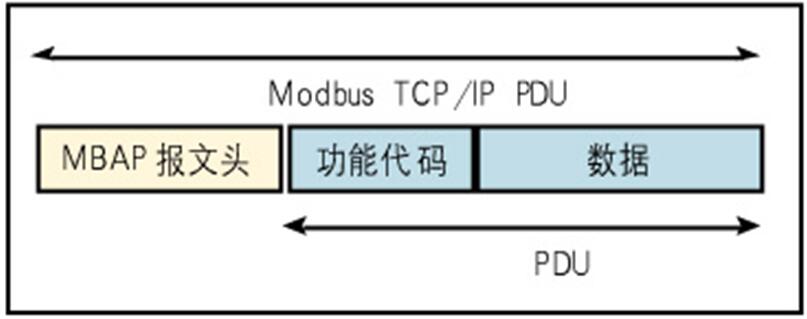
1.MBAP报文头(MBAP、Modbus Application Protocol、Modbus应用协议)分4个域,共7个字节,如下表所示:
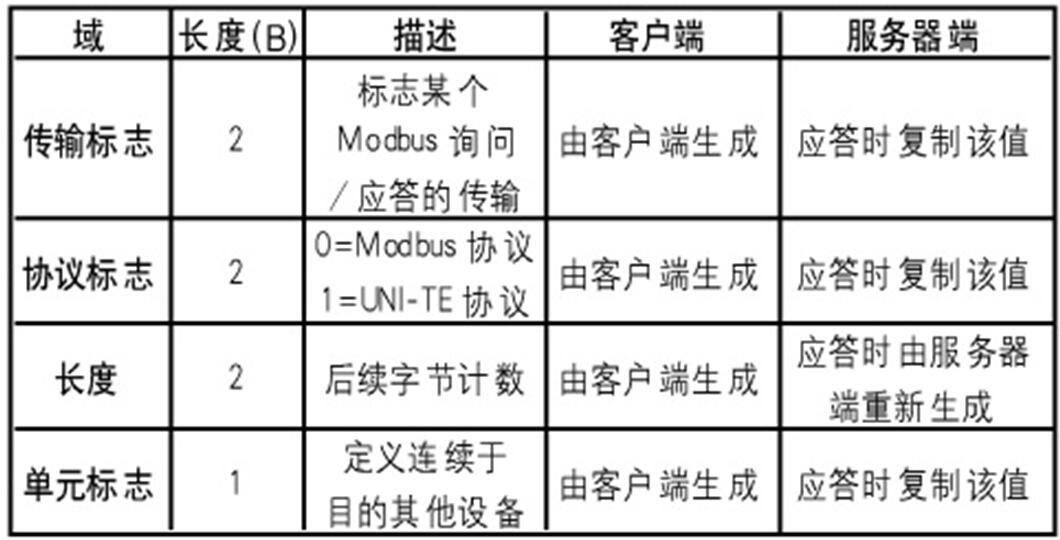
单元标志即为控制板的地址。
2.ModbusTCP功能代码
本控制板实现必要的功能码,参考Modbus RTU的功能码。
3.ModbusTCP数据
即为Modbus RTU的数据域。
八、恢复出厂设置以及固件升级
8.1恢复出厂设置
控制板有“RESET”按钮,可以用此复位控制板和恢复出厂设置,如图8.1所示。
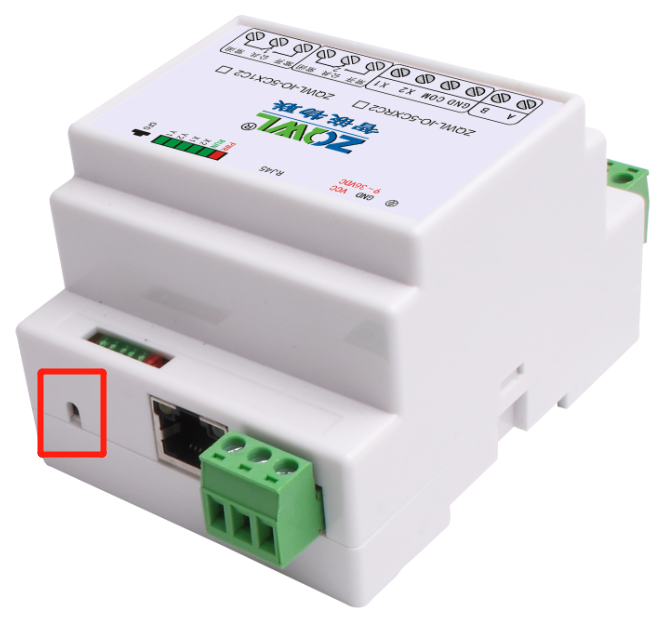
图8.1按键
按下“RESET”按键在松开(注意下时间要小于5秒),控制板复位。
按住“RESET”按键并保持5秒以上,等到“SYS”指示灯快闪时(10Hz左右),松开按键,此时控制板恢复出厂参数,如下:
串口参数:波特率115200;数据位8;不校验;1位停止位;
网络参数:IP为192.168.1.253
控制板地址:1。
8.2模块固件升级
注意,需要升级固件时,先与厂商联系以获取新的固件,按照图8.2中所示步骤进行固件升级。
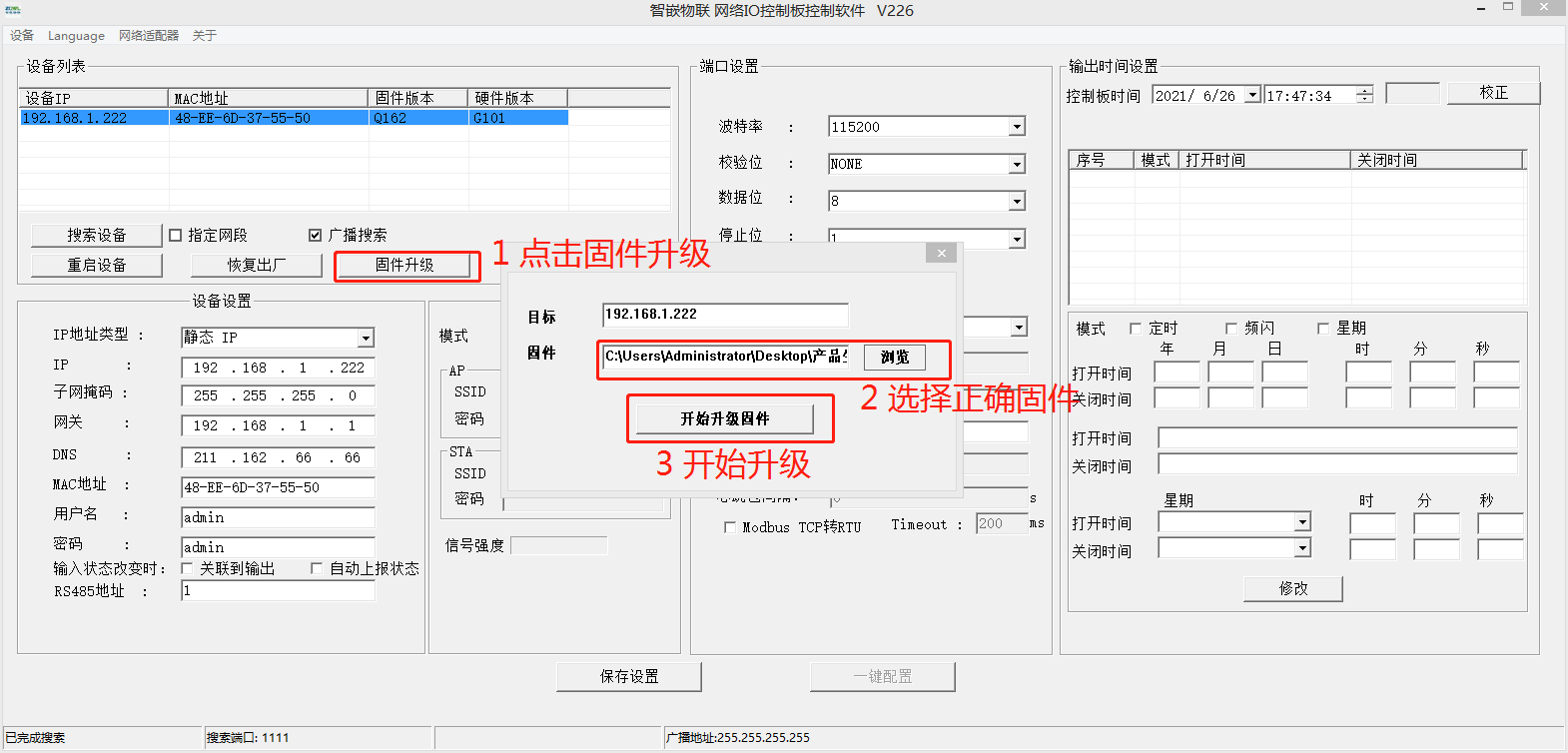
图8.2固件升级
九、应用案例
9.1网络IO控制器接入智嵌云控演示
智嵌物联的网络IO控制器(云版本)支持接入智嵌云,实现设备的远程控制与检测。本文档以智嵌的4路网络IO控制器为例,介绍设备接入智嵌云的方法,以及实现网页控制及手机APP控制的方法。
1.硬件连接
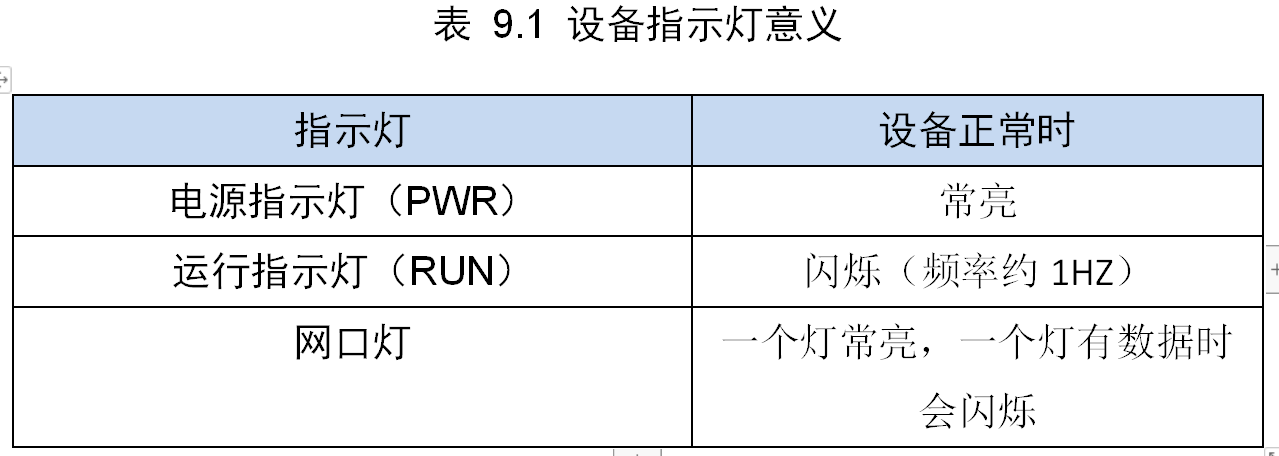
用交换机将IO控制器设备、路由器、电脑通过网线连接起来,如图9.1所示,用电源适配器为设备供电。供电后请先观察设备指示灯是否正常,如表9.1所示。
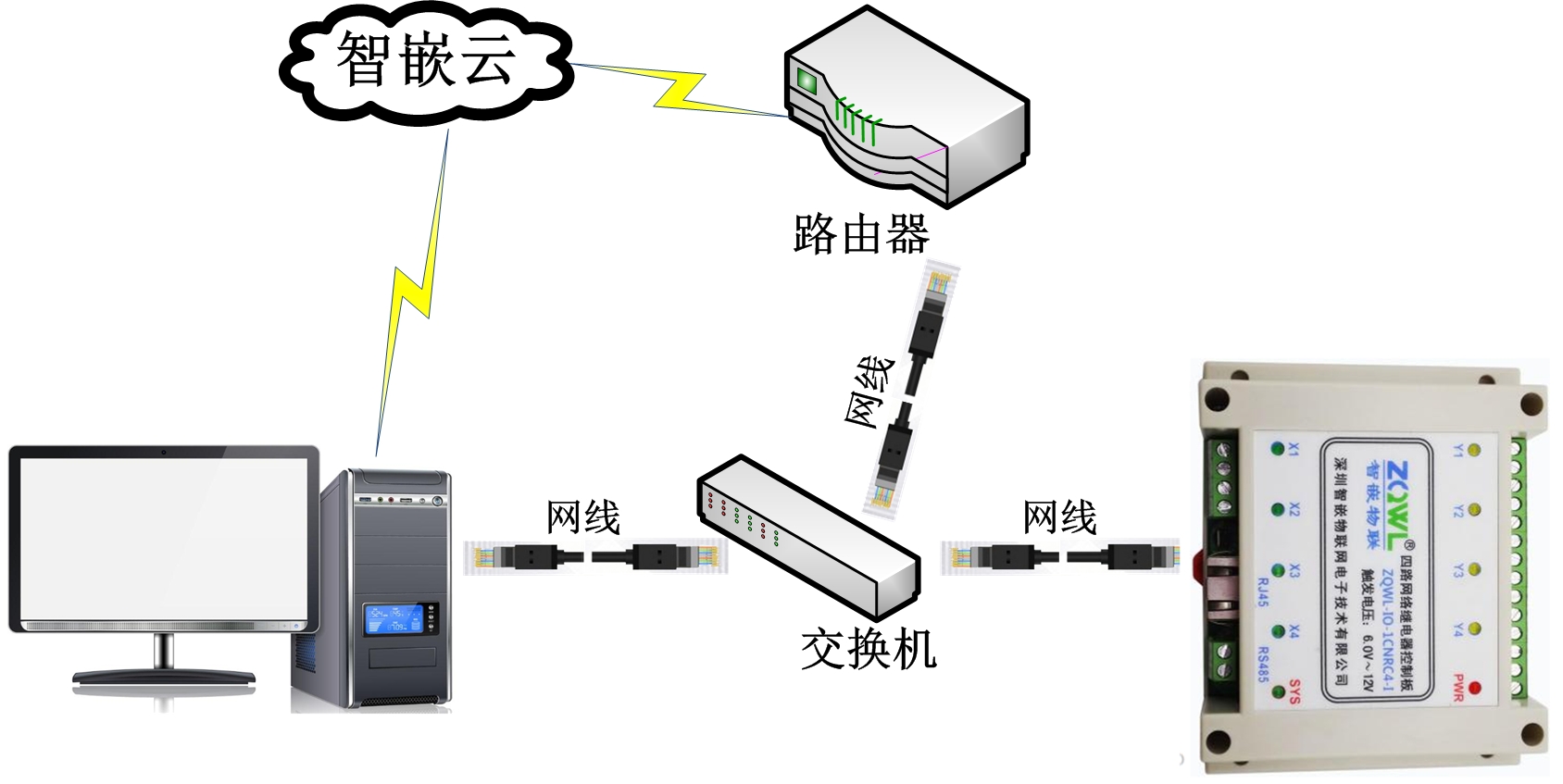
图9.1硬件连接
2.登录智嵌云平台账号
浏览器进入智嵌云管理平台,网址:www.zqwliot.com,选择智嵌云控的新版本界面,如图9.2所示。进入登录界面,注册并登录智嵌云平台账号,若已注册,直接登录即可,如图9.3所示。

图9.2智嵌云管理平台

图9.3智嵌云登录界面
3.创建项目
智嵌云平台是通过项目的方式来管理设备的,因此在用户添加设备之前要先创建一个项目及分组,如图9.4所示。
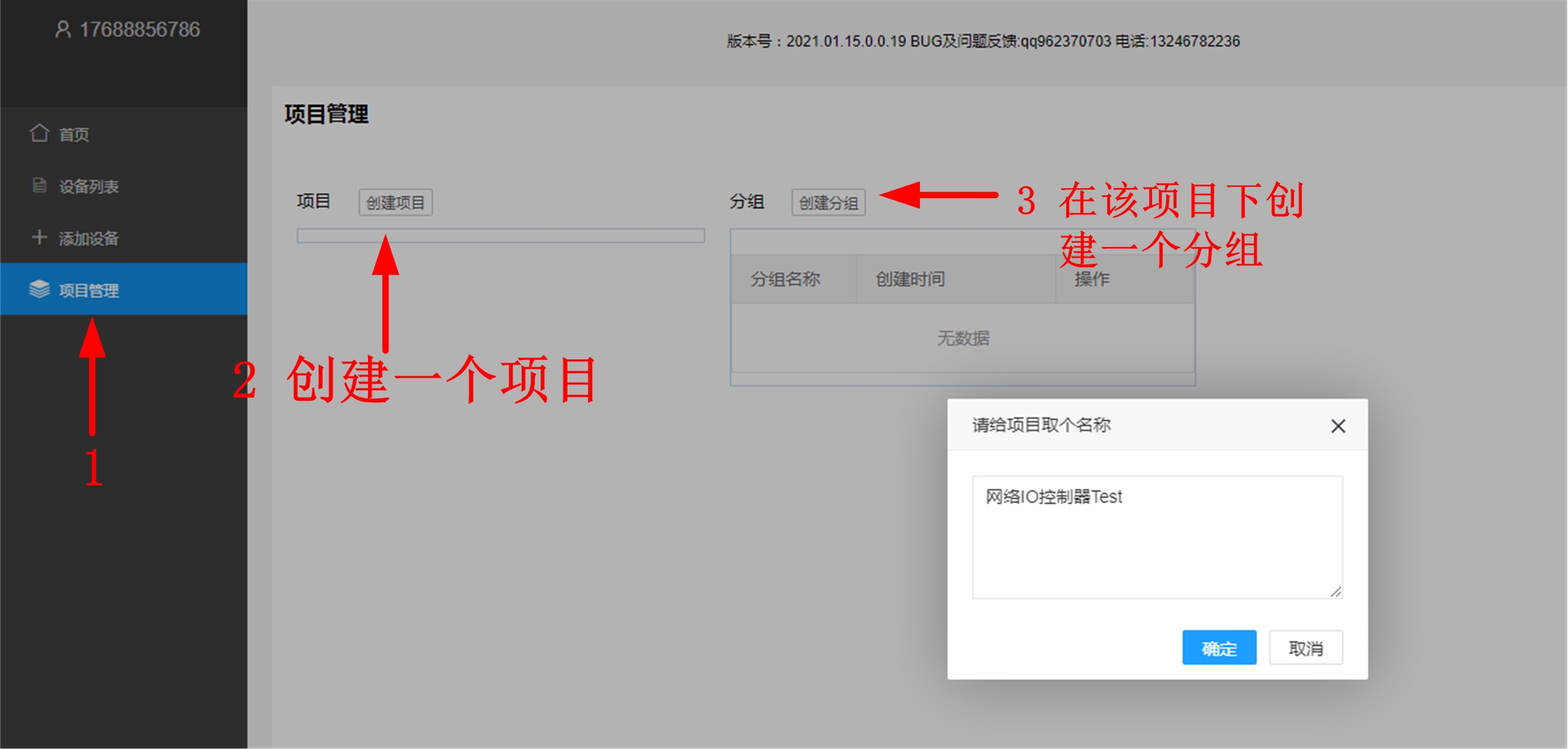
图9.4智嵌云平台创建项目步骤
4.添加设备
此步骤的目的是在用户的账号下添加该设备,此步完成后,系统会自动生成SN号,该SN号会在绑定设备时用到。
在已创建的项目分组下添加继电器控制板设备,具体步骤如图9.5所示。

图9.5智嵌云平台添加设备步骤
设备添加完成后,在设备列表菜单下找到刚添加的设备,复制设备SN及通讯密码,后面备用。

图9.6添加设备完成
5.配置设备参数
此步骤的目的是将网络设备与智嵌云平台建立连接。
打开“网络IO控制板配置软件”,按图9.7所示步骤进行配置。
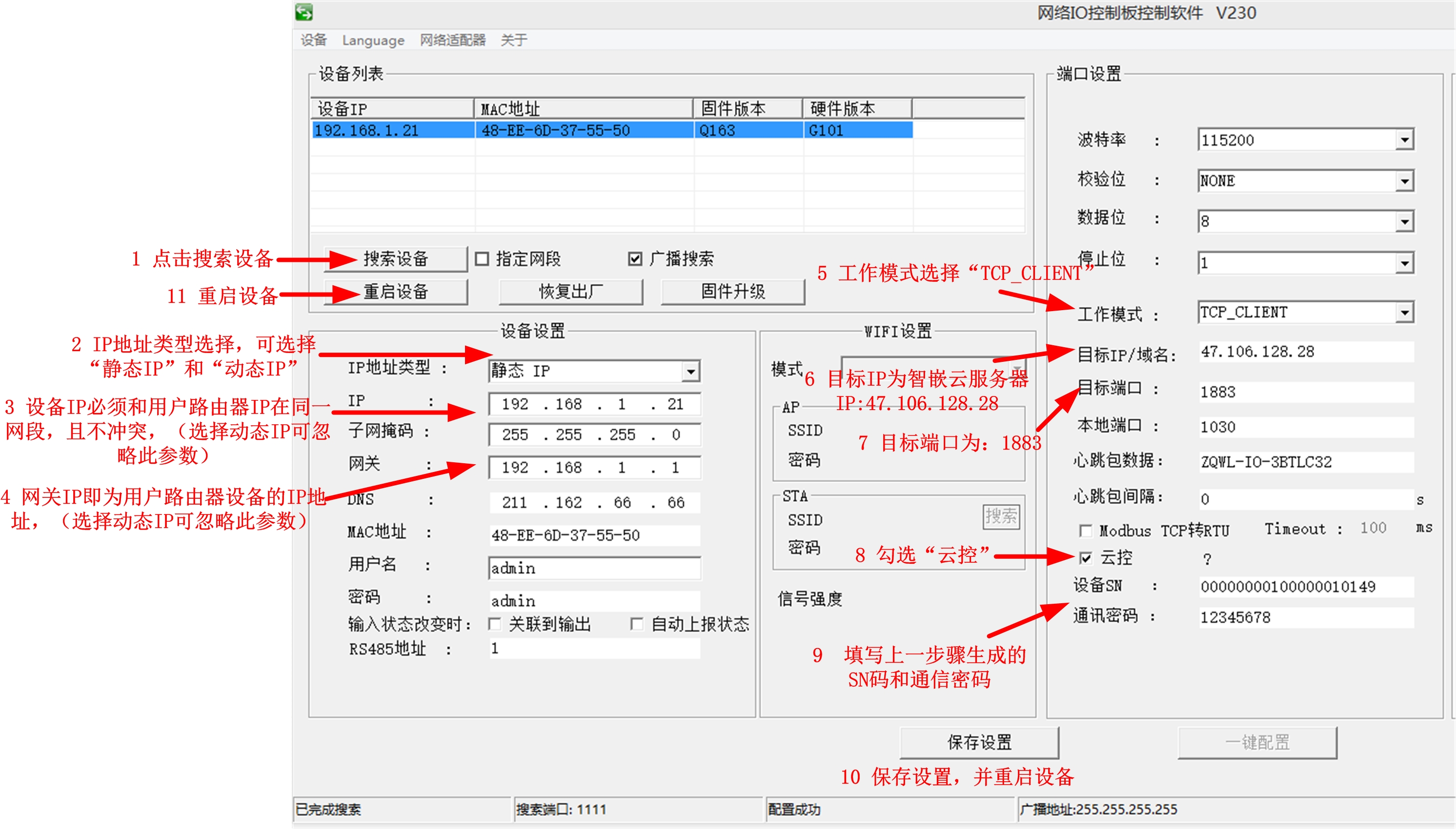
图9.7设备参数配置
6.网页控制
以上步骤完成后,设备已经接入到智嵌云上,如图9.8所示,设备已在线,此时可以通过网页或APP控制设备。

图9.8设备在线
点击“进入”,可跳转到设备的控制界面,如图9.9、图9.10所示。鼠标点击每一路继电器的“开”、“关”、“翻转”,继电器会做出相应的动作。点击“刷新状态”,可实时获取设备的开关量输入状态。
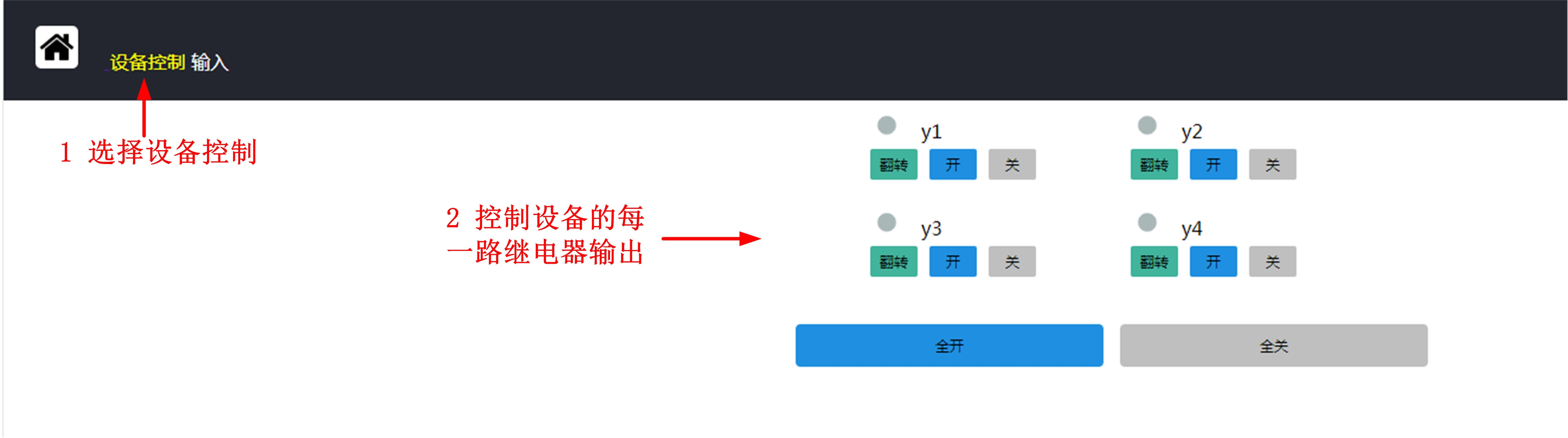
图9.9设备控制界面
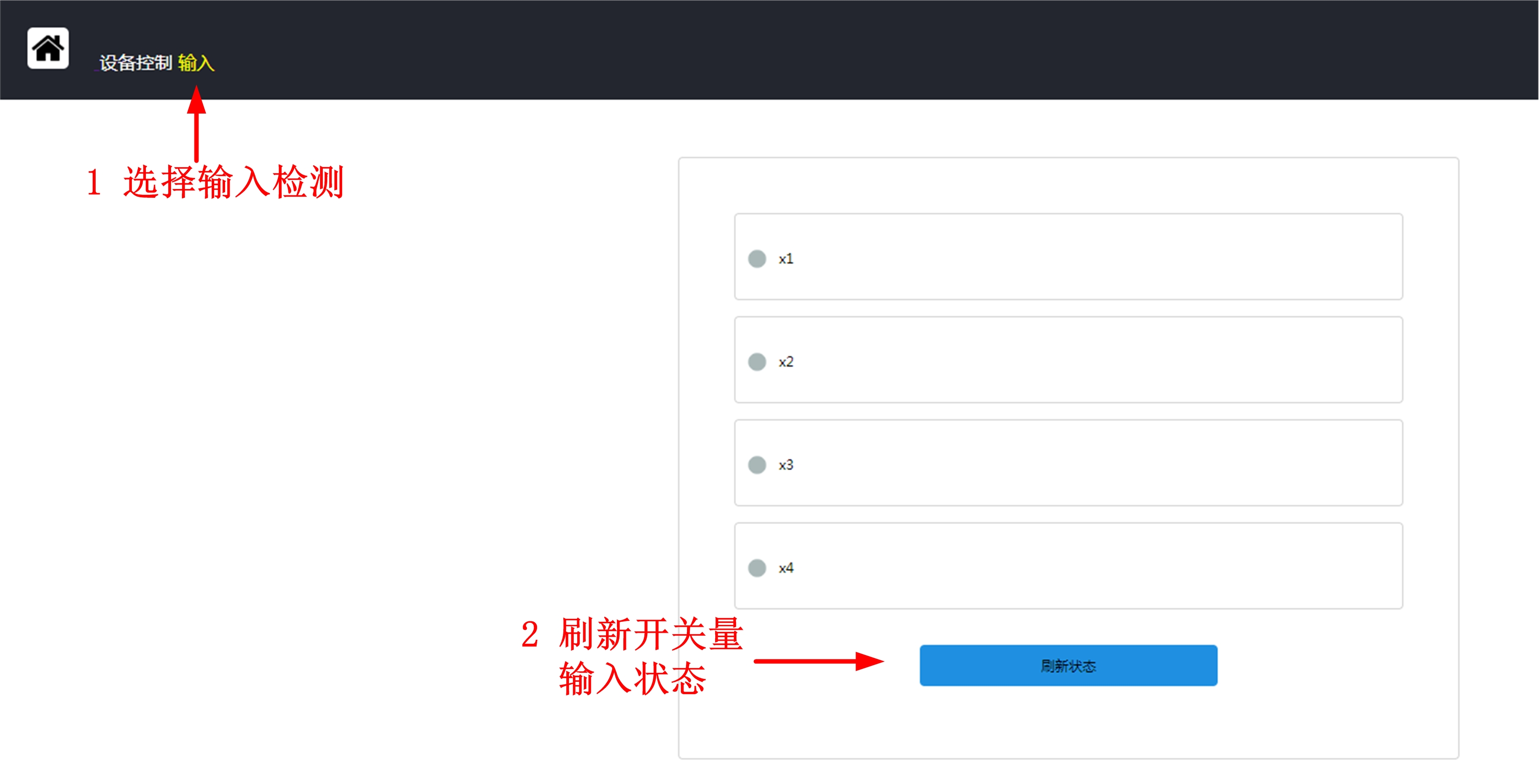
图9.10设备开关量输入检测界面
7.手机APP控制
下载“智嵌云控”APP。用手机浏览器扫面以下二维码下载APP安装包。
图9.11“智嵌云控”APP下载二维码
打开“智嵌云控”APP,进入登录界面(第一次使用需先注册智嵌云平台账号)。如图所示。
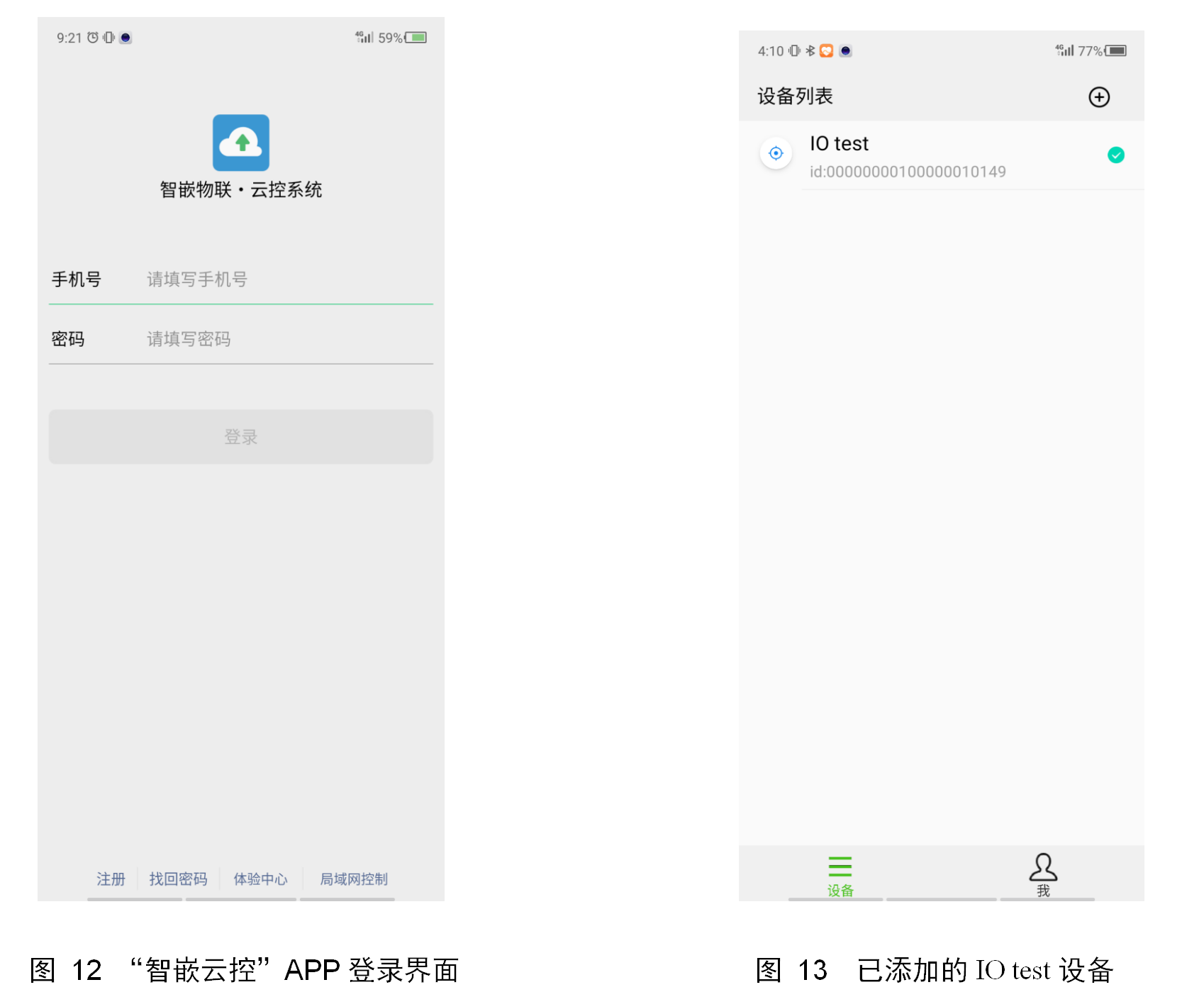
登录后,就可以看到之前添加的设备“IO test”了,如图12所示。
下面就可以对IO控制器进行远程控制了。如图14、图15、图16所示。


十、常见故障处理
1.搜索不到设备
使用“智嵌串口网络IO配置软件”搜不到设备时,请检查:
- 检查指示灯是否正常
2.能搜到设备但通信失败
检查设备参数是否配置正确(IP、工作模式、波特率等参数)。
- 设备IP是否正确
一般情况下需要设备和电脑在一个网段内,注意配置软件能搜到不一定说明就在一个段内。
- 串口参数是否正确
串口服务器的串口参数必须与所连串口设备参数一致才能通讯,如波特率,数据位,检验位,停止位。
- 端口的工作模式
设备每个端口都有4种工作模式,用户要根据自己的网络环境确定所使用的工作模式。
- 透传与Modbus TCP是否选对
当不勾选“Modbus TCP转RTU”时,设备为透明转换功能,即网络收到什么数据,相应的串口就会发出什么数据(串口到网络也是如此);当勾选“Modbus TCP转RTU”,设备为协议转换,网络和串口的数据必须符合该协议才能通讯正常。
- 参数修改后是否重启
当设备参数修改后,需要重启才能生效。
-
工业控制
+关注
关注
38文章
1722浏览量
92469
发布评论请先 登录
RLY - 8 - POE 继电器控制器:功能与使用指南
探索Crouzet导电液体控制继电器:功能、规格与应用
Celduc Relais SMCV:电机控制的固态继电器解决方案
深度解析 DRV110:适用于电磁阀、继电器和阀门的电流控制器
SPOC™+2 多通道 SPI 高端功率控制器使用指南
固态继电器参考设计:REF_SSR_AC_DC_2A 全方位解析
磁簧继电器与光控继电器:两种信号控制的路径差异
CAN继电器输出模块:2-32通道IO覆盖+自带配套软件,省成本还易操作
DAM-0222TA工业级继电器控制板:靠隔离RS485防干扰,凭智能自控提控制精度
无线通讯不布线,联动控制更省心!智能家居控制器的继电器/开关量应用
远程控制器:4-32 路继电器控制 + 数据采集,WiFi 通讯打破空间限制
工业物联网全能助手:4路网络IO控制器,让设备互联更智能



评论