 瑞萨e2studio----USRT通过定时器中断方式接收不定长数据
瑞萨e2studio----USRT通过定时器中断方式接收不定长数据

1.概述
本篇文章主要介绍如何使用e2studio对瑞萨单片机进行USRT通过定时器中断方式接收不定长数据。
2.硬件准备
首先需要准备一个开发板,这里我准备的是芯片型号 R7FA2L1AB2DFL 的开发板。
3.新建工程

4.工程模板
5.保存工程路径
6.芯片配置
本文中使用R7FA2L1AB2DFL来进行演示。
7.工程模板选择
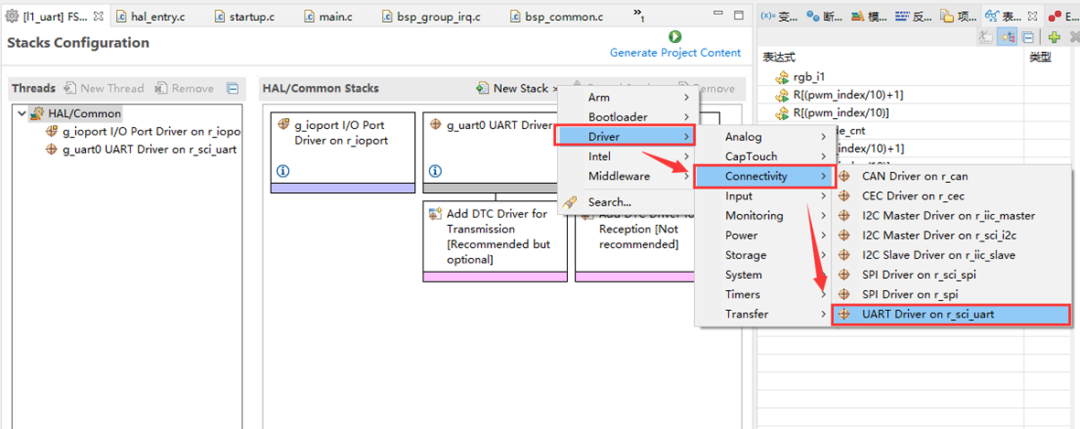
8.UART配置
点击Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
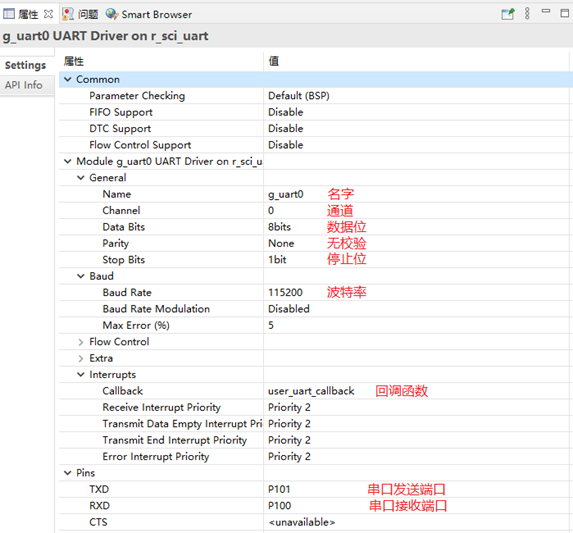
9.UART属性配置
10.PRINTF重定向
PRINTF重定向已经在上述文章中讲述,故可以查看往期文章进行学习。
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。
注意一定要加上头文件#include
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i11.回调函数user_uart_callback ()
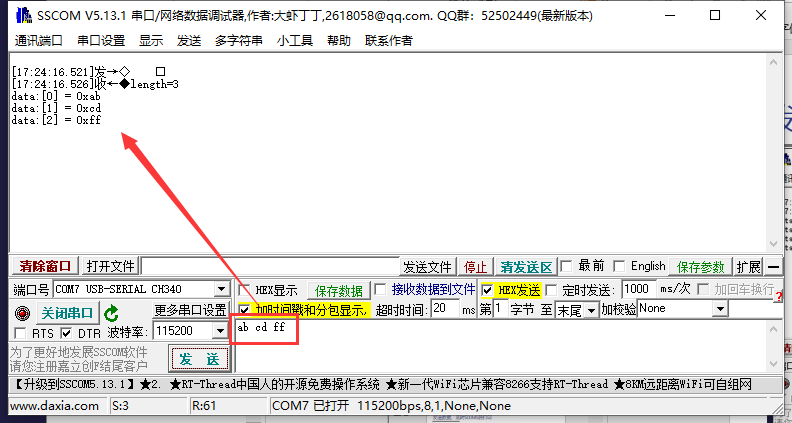
设置接受到0xff则输出已经输入的数据。
若接收到新的数据,使用R_GPT_Reset进行充值定时器计数。
volatile bool uart_send_complete_flag = false;
uint8_t RxBuff[1]; //进入中断接收数据的数组
uint8_t DataBuff[5000]; //保存接收到的数据的数组
int RxLine=0; //接收到的数据长度
int Rx_flag=0; //接受到数据标志
int Rx_flag_finish=0; //接受完成或者时间溢出
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
if(p_args->event == UART_EVENT_RX_CHAR)
{
RxBuff[0] = p_args->data;
RxLine++; //每接收到一个数据,进入回调数据长度加1
DataBuff[RxLine-1]=RxBuff[0]; //把每次接收到的数据保存到缓存数组
Rx_flag=1;
if(RxBuff[0]==0xff) //接收结束标志位,这个数据可以自定义,根据实际需求,这里只做示例使用,不一定是0xff
{
Rx_flag_finish=1;
}
RxBuff[0]=0;
err = R_GPT_Reset(&g_timer0_ctrl);
assert(FSP_SUCCESS == err);
}
}12.printf_usart打印函数
打印已经接受的数据以及其长度。
void printf_usart(void)
{
printf("length=%d\r\n",RxLine);
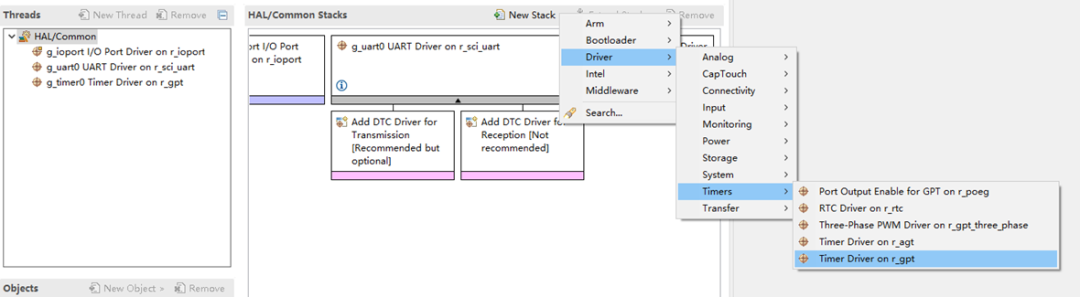
for(int i=0;i13.定时器设置
点击Stacks->New Stack->Driver->Timers -> Timers Driver on r_gpt。
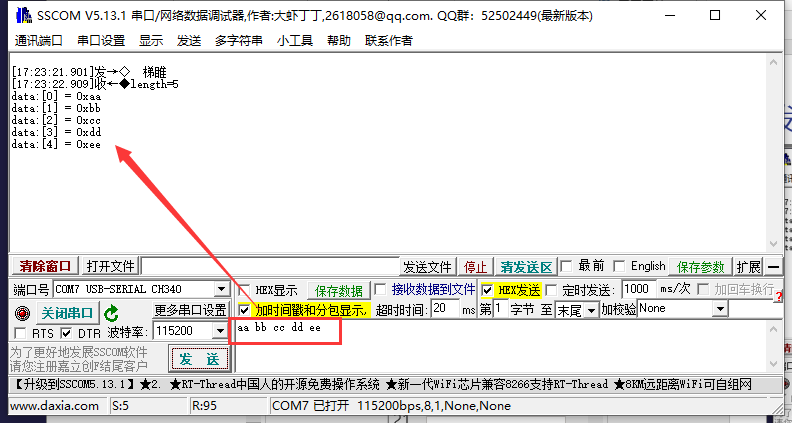
设置500ms无输入则输出已经输入的数据。
频率=时钟源/period,若设置计数时间为500ms一次,频率为1Hz,则period=48M/1=48000000
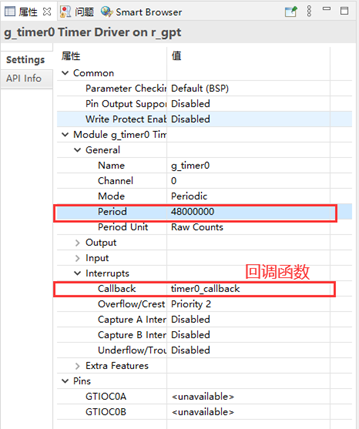
14.定时器回调函数timer0_callback()
/* Callback function */
void timer0_callback(timer_callback_args_t *p_args)
{
/* TODO: add your own code here */
if (TIMER_EVENT_CYCLE_END == p_args->event)
{
if(Rx_flag==1)
{
printf_usart();
Rx_flag=0;
}
}
}15.完整代码
#include "hal_data.h"
#include
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
void printf_usart(void);
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
uint8_t RxBuff[1]; //进入中断接收数据的数组
uint8_t DataBuff[5000]; //保存接收到的数据的数组
int RxLine=0; //接收到的数据长度
int Rx_flag=0; //接受到数据标志
int Rx_flag_finish=0; //接受完成或者时间溢出
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
if(p_args->event == UART_EVENT_RX_CHAR)
{
RxBuff[0] = p_args->data;
RxLine++; //每接收到一个数据,进入回调数据长度加1
DataBuff[RxLine-1]=RxBuff[0]; //把每次接收到的数据保存到缓存数组
Rx_flag=1;
if(RxBuff[0]==0xff) //接收结束标志位,这个数据可以自定义,根据实际需求,这里只做示例使用,不一定是0xff
{
Rx_flag_finish=1;
}
RxBuff[0]=0;
err = R_GPT_Reset(&g_timer0_ctrl);
assert(FSP_SUCCESS == err);
}
}
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;ievent)
{
if(Rx_flag==1)
{
printf_usart();
Rx_flag=0;
}
}
}
void hal_entry(void)
{
/* TODO: add your own code here */
/* Open the transfer instance with initial configuration. */
err = R_SCI_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);
assert(FSP_SUCCESS == err);
/* Initializes the module. */
err = R_GPT_Open(&g_timer0_ctrl, &g_timer0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Start the timer. */
(void) R_GPT_Start(&g_timer0_ctrl);
while(1)
{
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MILLISECONDS); // NOLINT100->160
if(Rx_flag_finish==1)
{
printf_usart();
}
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
}
void printf_usart(void)
{
printf("length=%d\r\n",RxLine);
for(int i=0;i16.发送数据,并且以0xff结尾
17.发送数据,延时500ms后打印
18.教学视频
视频教学稍后会在B站官方账号更新,请留意B站视频更新~
原文标题:瑞萨e2studio----USRT通过定时器中断方式接收不定长数据
文章出处:【微信公众号:RA生态工作室】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mcu
+关注
关注
146文章
17541浏览量
355473 -
ARM
+关注
关注
134文章
9235浏览量
371700 -
嵌入式
+关注
关注
5112文章
19326浏览量
310981
发布评论请先 登录
相关推荐
e²studio和Keil简介及如何安装e²studio开发环境
(简称为e2或e2s)是瑞萨电子的一款包含代码开发、构建和调试的开发工具。e²studio基于开

【瑞萨RA2L1入门学习】RA2L1开发环境搭建
Eclipse 衍生的 IDE,e² studio 保留了 Eclipse 的灵活性,同时针对瑞萨 MCU 进行了大量优化。尤其是FSP 的配置工具 ,相比手写寄存
发表于 03-07 11:33
如何使用DMA进行USART不定长度接收
在上一讲中,我们对USART进行了简单介绍,并讲解了如何在不使用DMA的情况下进行不定长度数据接收,本讲将着重讲解如何使用DMA进行USART不定长度接收。


瑞萨e2studio(1)----瑞萨芯片之搭建FSP环境
视频教学
样品申请
请勿添加外链
e2studio软件
e2studio是瑞萨的集成开发环境,FSP 提供了众多可提高效率的工具,用于开发针对瑞
发表于 09-30 15:28
STM32CUBEMX(8)--USART通过定时器中断方式接收不定长数据
概述
本文利用中断实现串口不定长接收(非DMA),使用HAL库,将接收的数据打印出去。 DMA接收
发表于 09-06 16:48
STM32CUBEMX(2)--USART通过DMA方式接收不定长数据
概述
直接存储器访问(DMA)用于在外设与存储器之间以及存储器与存储器之间提供高速数据传输。可以在无需任何CPU操作的情况下
发表于 09-04 11:48

stm32f103通过UART_RX空闲中断服务函数接收不定长数据,运行一段时间后会进入HardFault_Handler的原因?
目的:通过UART RX DMA + UART空闲中断接收不定长数据。
描述:打开UART_RX_DMA
发表于 04-26 06:43
STM32F030串口用IDLE中断接收不定长度数据包,中断异常的原因?
如题,在使用IDLE中断接收不定长度的数据包,发现程序一直处于IDLE中断中。程序如下
串口配置程序
void USART_Configu
发表于 04-12 06:08
用STM32F030F4串口空闲中断接收不定长数据,发生中断后不知道如何计算接收到的字节数?
我用STM32F030F4串口空闲中断接收不定长数据,发生中断后不知道怎样计算接收到的字节数。
发表于 04-03 07:12





 工商网监
工商网监
评论