 瑞萨e2studio----外部中断&定时器配置输入捕获测量频率
瑞萨e2studio----外部中断&定时器配置输入捕获测量频率

1.概述
本篇文章主要介绍如何使用e2studio对瑞萨单片机外部中断进行输入捕获,同时通过定时器计算其频率和占空比,同时输入一个PWM验证是否正确。
2.硬件准备
首先需要准备一个开发板,这里我准备的是芯片型号 R7FA2L1AB2DFL 的开发板。
3.新建工程

4.工程模板
5.保存工程路径

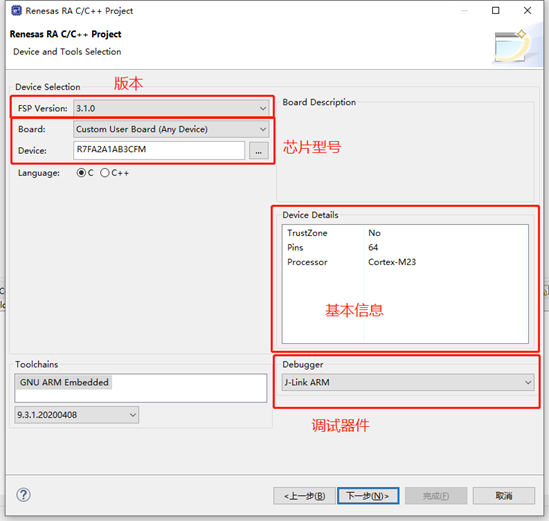
6.芯片配置
本文中使用R7FA2L1AB2DFL来进行演示。
7
7.工程模板选择
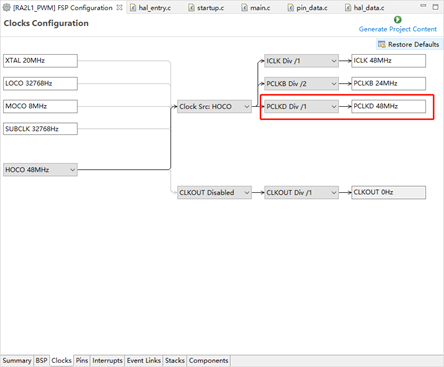
8.选择定时器

时钟源在这设置的是PCKLD 48M 。
可以通过修改该频率来修改占空比频率。
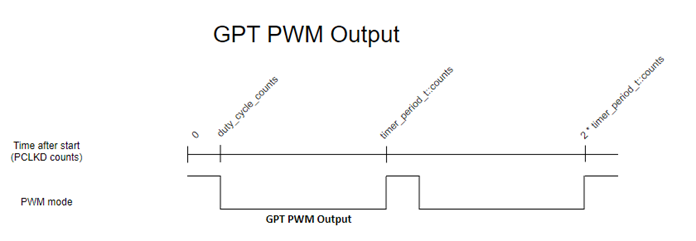
9.PWM(脉冲宽度调制)
脉冲宽度调制是一种模拟控制方式,根据相应载荷的变化来调制晶体管基极或MOS管栅极的偏置,来实现晶体管或MOS管导通时间的改变,从而实现开关稳压电源输出的改变。这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字信号对模拟电路进行控制的一种非常有效的技术。脉冲宽度调制是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
在瑞萨RA系列MCU中有两种定时器,一种是通用PWM定时器GPT,另外一种是异步通用定时器AGT。
频率=主频/period
+占空比=cycle/period
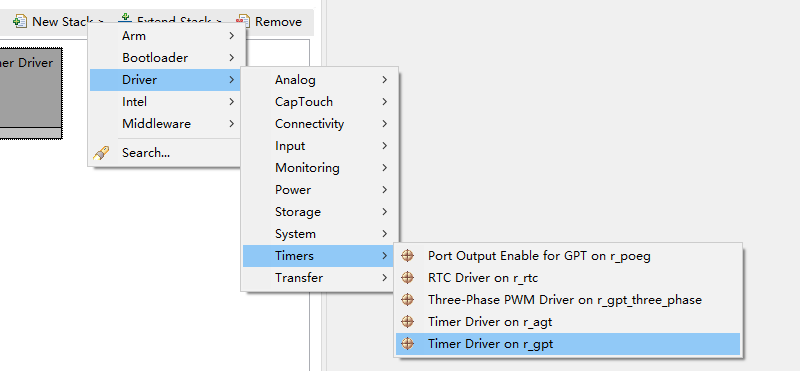
10.定时器配置
点击Stacks->New Stack->Driver->Timers->Timer Driver on r_gpt。
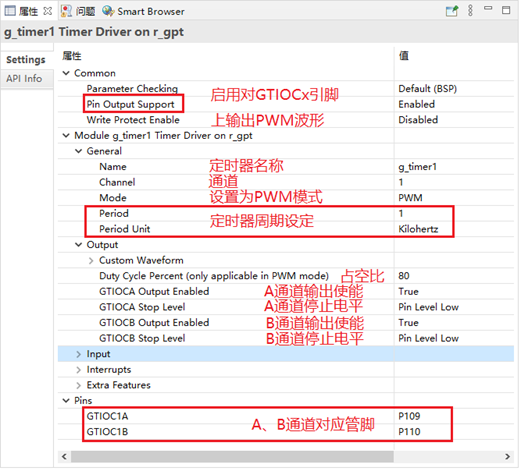
11.定时器输出PWM配置
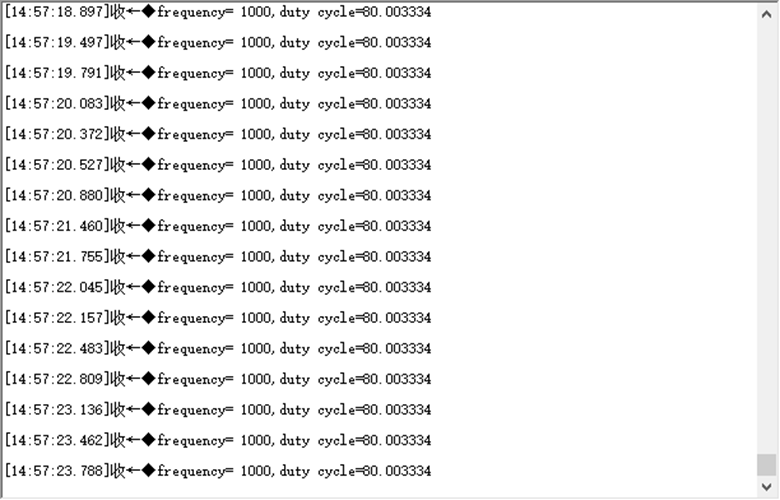
设置PWM输出,输出频率为1kHz,占空比为80%。
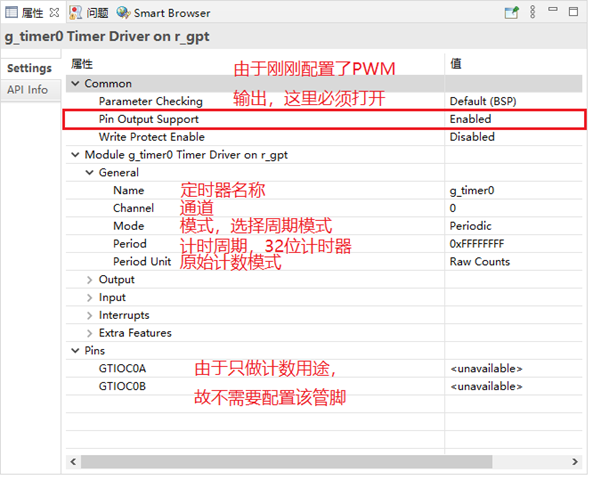
12.定时器输入捕获配置
点击Stacks->New Stack->Driver->Timers->Timer Driver on r_gpt。
设置定时器制作计数器配置,由于不需要对上升沿和下降沿进行捕获,故只需配置为计数模式即可。
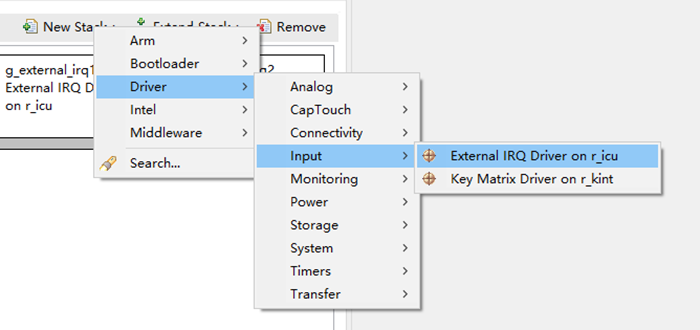
13.IRQ配置
点击Stacks->New Stack->Driver->Input -> External IRQ Driver on r_icu 。
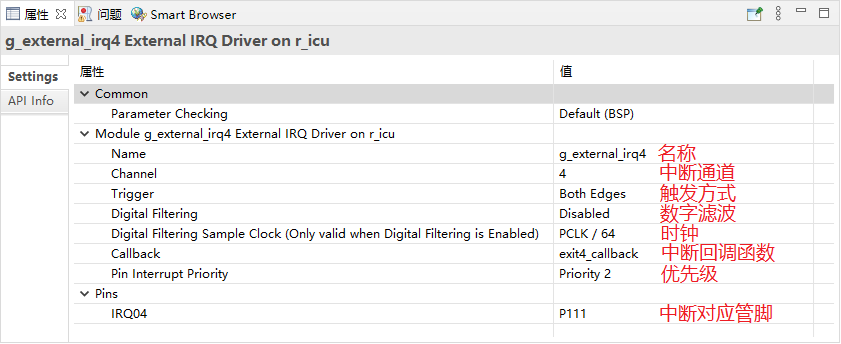
14.IRQ属性配置
由于需要计算频率和占空比,故需要设置触发方式为双边触发的模式。
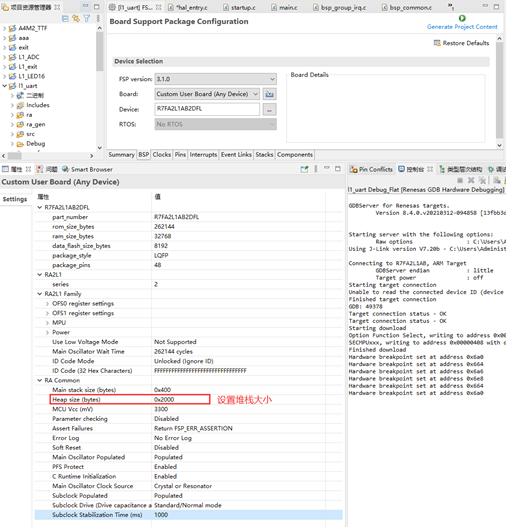
15.设置e2studio堆栈
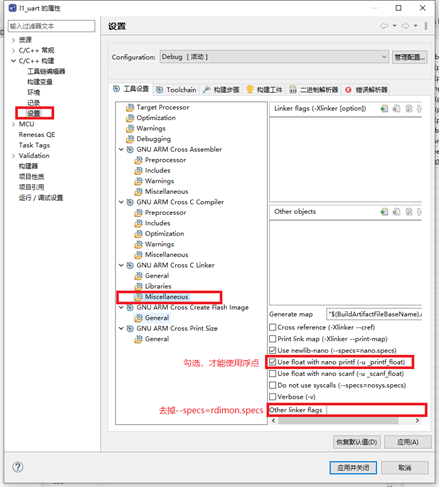
16.e2studio的重定向printf设置
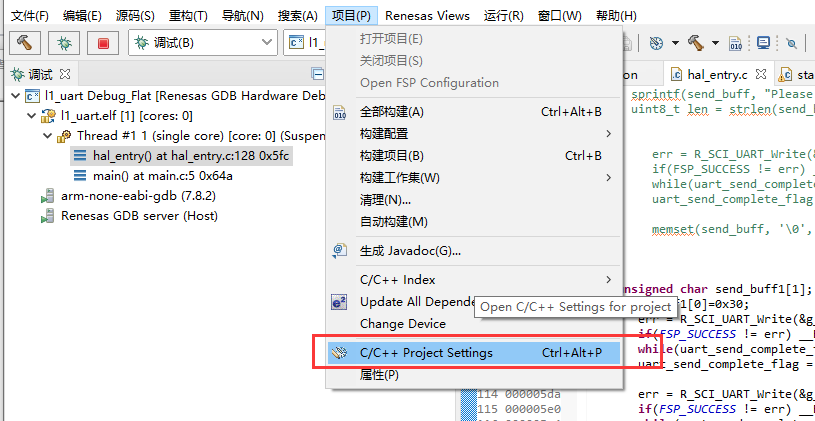
C++ 构建->设置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
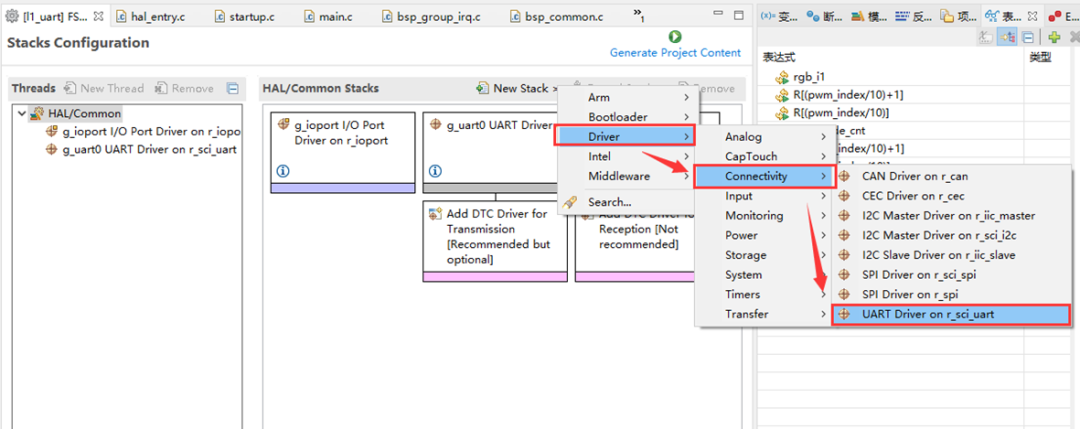
17.UART配置
点击Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
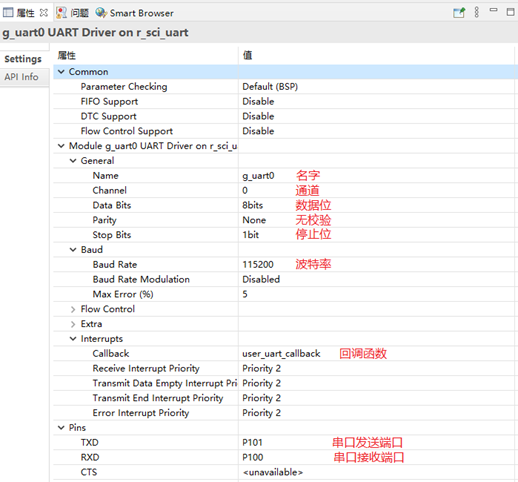
18.UART属性配置
配置串口,用于打印数据。
19.printf输出重定向到串口
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。
注意一定要加上头文件#include
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
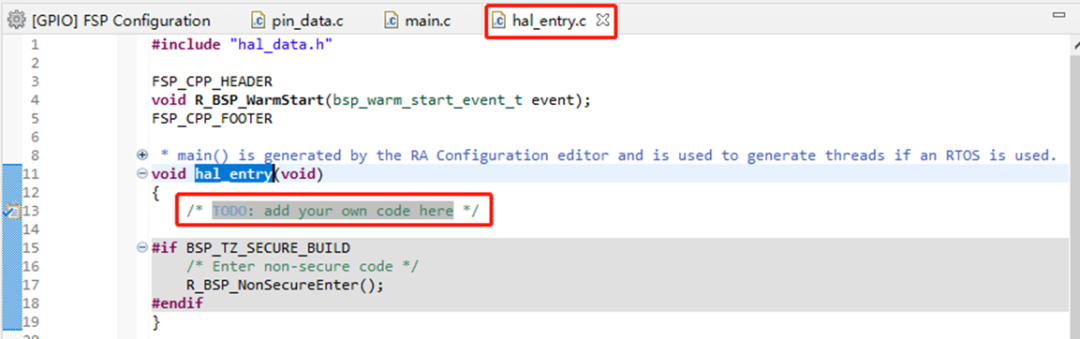
for(int i=0;i;i++)>20.工程文件
打开hal_entry.c,可以看到在hal_entry函数内,注释着可以在这输入自己的代码。
21.占空比与频率计算
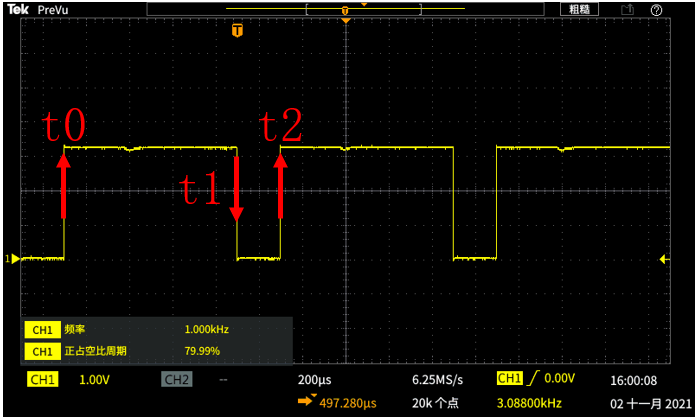
占空比=(t1-t0)/(t2-t0)
频率=(t2-t0)/时钟频率= =(t2-t0)/48M
22.回调函数exit4_callback()
由于设置了上升沿和下降沿都会进入回调函数中,故需要判断引脚电平来判断是属于高电平还是低电平。
bsp_io_level_t p_port_value_port_111;
/*读取端口电平状态,如果是低电平则发生的是下降沿,高电平则是上升沿*/
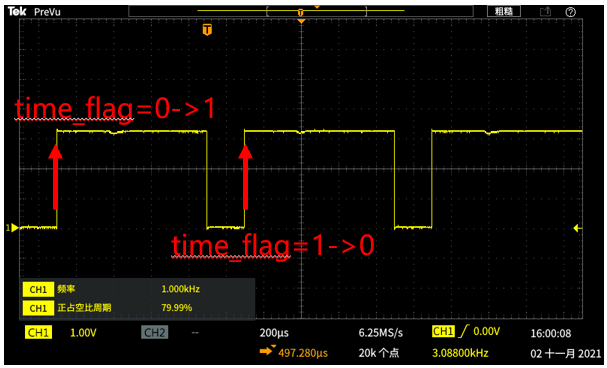
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_01_PIN_11, &p_port_value_port_111);周期需要2个上升沿去判断,设定第一个上升沿time_flag由0变为1,则第二个上升沿则为time_flag由1变为0.
计算周期需要注意定时器周期计数器溢出,若存在time_flag= 0->1读取的计数值大于time_flag= 1->0读取的计数值,则一个周期为g_capture_num=current_period_counts+g_capture_num1-g_capture_num0。
若没有溢出,则g_capture_num=g_capture_num1-g_capture_num0。
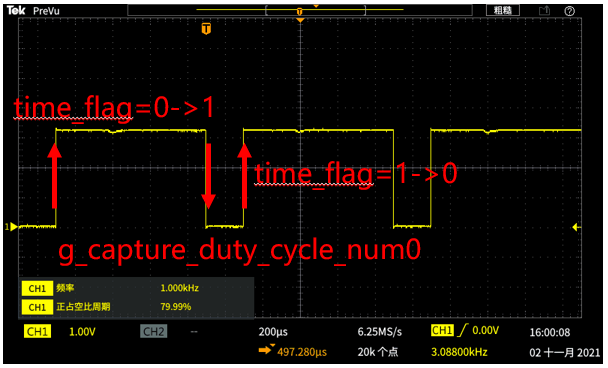
频率则需要计算下降沿到time_flag=1的一个周期,在除以g_capture_num(48M)。
计算频率需要注意定时器周期计数器溢出,若存在time_flag= 0->1读取的计数值大于g_capture_duty_cycle_num0读取的计数值,则一个周期为g_capture_num=current_period_counts+g_capture_num1-g_capture_num0。若没有溢出,则g_capture_duty_cycle_num=g_capture_duty_cycle_num0-g_capture_num0。
23.代码
#include "hal_data.h"
#include
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;//串口发送完毕标志位
volatile bool time_flag = 0;//上升沿标志位
volatile uint64_t g_capture_num =0;//两个上升沿之间的周期
volatile uint64_t g_capture_num0 =0;//第0个上升沿定时器计数值
volatile uint64_t g_capture_num1 =0;//第1个上升沿定时器计数值
volatile uint64_t g_capture_frequency = 0;//频率
volatile float g_capture_duty_cycle =0;//占空比
volatile int g_capture_duty_cycle_num =0;//+占空比周期
volatile uint64_t g_capture_duty_cycle_num0 =0;//下降沿定时器计数值
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i=g_capture_num0)
g_capture_num=g_capture_num1-g_capture_num0;
else
g_capture_num=current_period_counts+g_capture_num1-g_capture_num0;
g_capture_frequency= frequency/g_capture_num;//计算频率
}
}
else
{
if(time_flag==1)
{
g_capture_duty_cycle_num0=status.counter;
if(g_capture_duty_cycle_num0>=g_capture_num0)
g_capture_duty_cycle_num=g_capture_duty_cycle_num0-g_capture_num0;
else
g_capture_duty_cycle_num=current_period_counts+g_capture_duty_cycle_num0-g_capture_num0;
g_capture_duty_cycle=(g_capture_duty_cycle_num*100/(float)g_capture_num);//占空比
}
}
}
void hal_entry(void)
{
/* TODO: add your own code here */
err = R_SCI_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);
assert(FSP_SUCCESS == err);
/* Initializes the module. */
err = R_GPT_Open(&g_timer0_ctrl, &g_timer0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Start the timer. */
(void) R_GPT_Start(&g_timer0_ctrl);
/* Enable captures. Captured values arrive in the interrupt. */
(void) R_GPT_Enable(&g_timer0_ctrl);
/* Initializes the module. */
err = R_GPT_Open(&g_timer1_ctrl, &g_timer1_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Start the timer. */
(void) R_GPT_Start(&g_timer1_ctrl);
/* Configure the external interrupt. */
fsp_err_t err = R_ICU_ExternalIrqOpen(&g_external_irq4_ctrl, &g_external_irq4_cfg);
assert(FSP_SUCCESS == err);
/* Enable the external interrupt. */
/* Enable not required when used with ELC or DMAC. */
err = R_ICU_ExternalIrqEnable(&g_external_irq4_ctrl);
assert(FSP_SUCCESS == err);
while(1)
{
printf("frequency= %lld,duty cycle=%f\n",g_capture_frequency,g_capture_duty_cycle);
g_capture_num=0;
g_capture_duty_cycle=0;
R_BSP_SoftwareDelay (200, BSP_DELAY_UNITS_MILLISECONDS);
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
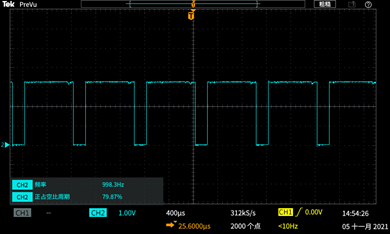
};i++)>24.结果演示
频率1K 占空比80%
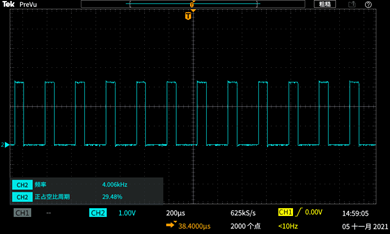
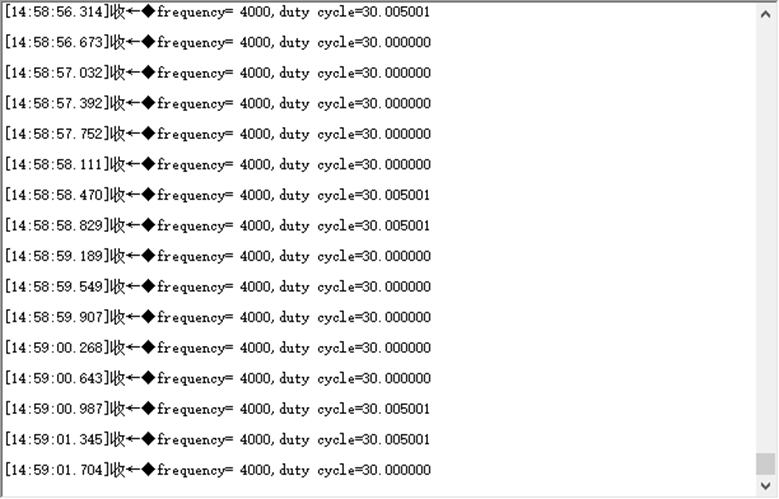
频率4K 占空比30%
25.视频教学
视频教学稍后会在B站官方账号更新,请留意B站视频更新~

原创:By RA_Billy Xiao
原文标题:瑞萨e2studio----外部中断&定时器配置输入捕获测量频率
文章出处:【微信公众号:RA生态工作室】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mcu
+关注
关注
146文章
17400浏览量
353250 -
ARM
+关注
关注
134文章
9193浏览量
370169 -
嵌入式
+关注
关注
5097文章
19228浏览量
308788 -
开发板
+关注
关注
25文章
5167浏览量
98591
发布评论请先 登录
相关推荐
双模载波芯片CN8513&CN8514在智能家居中的创新应用
双模载波芯片CN8513&CN8514在智能家居中的创新应用

如何判断产品需不需要做AT&amp;amp;T认证?AT&amp;amp;T测试内容和要求分享
随着经济全球化的发展,国内越来越多产品厂商选择将自家产品出口到北美市场,而这时候各位厂商都会面临产品需不需要做AT&T的问题。今天英利检测针对这一问题整理了一些关于AT&T认证中

北美运营商AT&amp;amp;T认证中的VoLTE测试项
北美运营商AT&T的认证测试内容涵盖了多个方面,以确保设备和服务的质量、兼容性以及用户体验。在AT&T的认证测试中,VoLTE(VoiceoverLTE)测试项是一个重要的组成部分
北美运营商AT&amp;amp;T认证的测试内容有哪些?
北美运营商AT&T的认证测试内容涵盖了多个方面,以确保设备和服务的质量、兼容性以及用户体验。以下是英利检测整合的AT&T认证的主要测试内容:基础认证测试联邦通信委员会(FCC

北美运营商AT&amp;amp;T认证的费用受哪些因素影响
申请北美运营商AT&T认证的价格因多种因素而异,包括产品类型、认证范围、测试难度等。一般来说,申请AT&T认证的费用可能相对较高,因为AT&T作为北美地区的主要电信运营商,其

onsemi LV/MV MOSFET 产品介绍 &amp;amp; 行业应用
01直播介绍直播时间2024/10/281430直播内容1.onsemiLV/MVMOSFET产品优势&市场地位。2.onsemiLV/MVMOSFETRoadmap。3.onsemiT10

思瑞浦车规级产品矩阵,全面覆盖汽车级CAN&amp;amp;LIN、LDO需求
聚焦高性能模拟芯片和嵌入式处理器近期,思瑞浦为广大工程师带来了《思瑞浦车规级产品矩阵,全面覆盖汽车级CAN&LIN、LDO需求》的在线研讨会直播,重点介绍了思

FS201资料(pcb &amp; DEMO &amp; 原理图)
电子发烧友网站提供《FS201资料(pcb & DEMO & 原理图).zip》资料免费下载
发表于 07-16 11:24
•2次下载
北美运营商AT&amp;amp;T认证入库产品范围名单相关
AT&T作为全球领先的通信服务运营商之一,通过AT&T认证不仅是对产品质量的认可,更是产品打开北美市场大门的重要凭证。然而,或许您还不清楚AT&T认证入库的产品范围,接下来
解读北美运营商,AT&amp;amp;T的认证分类与认证内容分享
在数字化日益深入的今天,通信技术的稳定与安全对于个人、企业乃至整个国家都至关重要。作为北美通信领域的领军者,AT&T一直致力于为用户提供高效、可靠的通信服务。而在这背后,AT&T
瑞萨与RT-Thread推出基于RT-Thread&amp;OpenMV的RA8人机交互方案
瑞萨与战略合作伙伴RT-Thread携手于2024年2月底正式发布了全新的硬件产品——基于RT-Thread&OpenMV的RA8人机交互解决方案Vision Board。
安富利带你揭秘IP&amp;E元器件的赋能之路
IP&E,是Interconnect(互连)、Passive(无源)和Electromechanical(机电)的缩写,代表着电子元器件中最为基础和重要的分支之一。
Open RAN的未来及其对AT&amp;T的意义
3月14日消息,在“Connected America 2024”会议上,AT&T高级副总裁兼网络首席技术官Yigal Elbaz讨论了Open RAN 的未来及其对AT&T的意义。





 工商网监
工商网监
评论