 EtherCAT运动控制卡的辅助调试工具与方法介绍
EtherCAT运动控制卡的辅助调试工具与方法介绍
今天,正运动小助手给大家分享一下EtherCAT运动控制卡之ECI2820如何使用通过正运动辅助调试工具ZDevelop进行调试,本文以单轴例程为例进行演示如何通过ZDevelop进行对应调试内容。
在正式学习之前,我们先了解一下正运动技术的运动控制卡ECI2618和ECI2828。这两款产品分别是6轴,8轴运动控制卡。

ECI2618支持6轴脉冲输入与编码器反馈,板载24点输入,16点输出,2AD,2DA,支持手轮接口,其中特定输出口支持高速PWM控制。

ECI2828支持8轴总线型输入与编码器反馈,板载24点输入,16点输出,2路AD,2路DA,支持手轮接口,其中特定输出口支持高速PWM控制。
ECI2618,ECI2828均使用同一套API函数,均支持C、C++、C#、LabVIEW、Python、Delphi等开发语言,支持VC6.0、VB6.0、Qt、.Net等平台,支持Windows、Linux、WinCE、iMac等操作系统。
接下来,进入正题。
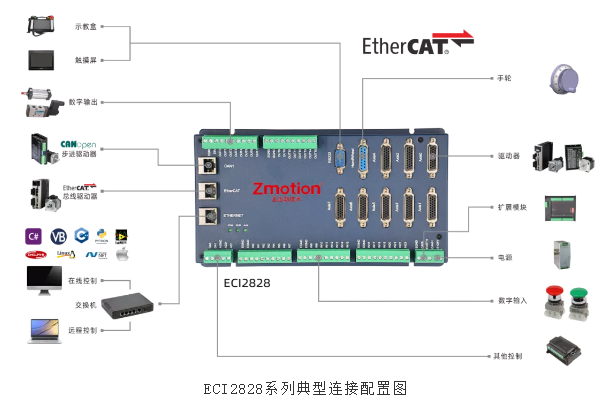
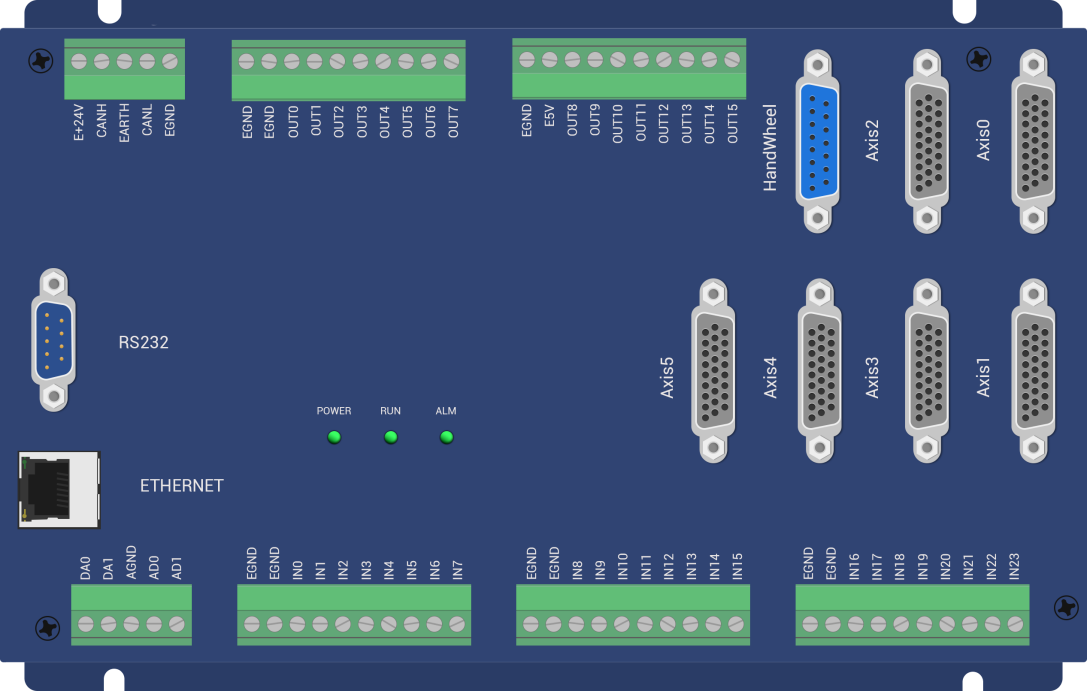
一 、ECI2828运动控制卡硬件介绍
ECI2828系列运动控制卡支持多达 16 轴直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴、机械手指令等;采用优化的网络通讯协议可以实现实时的运动控制。
ECI2828系列运动运动控制卡支持以太网,232 通讯接口和电脑相连,接收电脑的指令运行,可以通过EtherCAT总线和CAN总线去连接各个扩展模块,从而扩展输入输出点数或运动轴。
ECI2828系列运动控制卡的应用程序可以使用 VC,VB,VS,C++,C#等软件来开发,程序运行时需要动态库 zmotion.dll。调试时可以把ZDevelop软件同时连接到控制器,从而方便调试、方便观察。
二 、C#语言进行运动控制开发
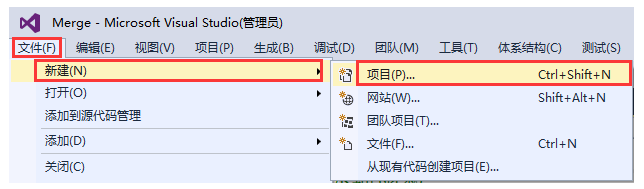
1.在VS2015菜单“文件”→“新建”→ “项目”,启动创建项目向导。
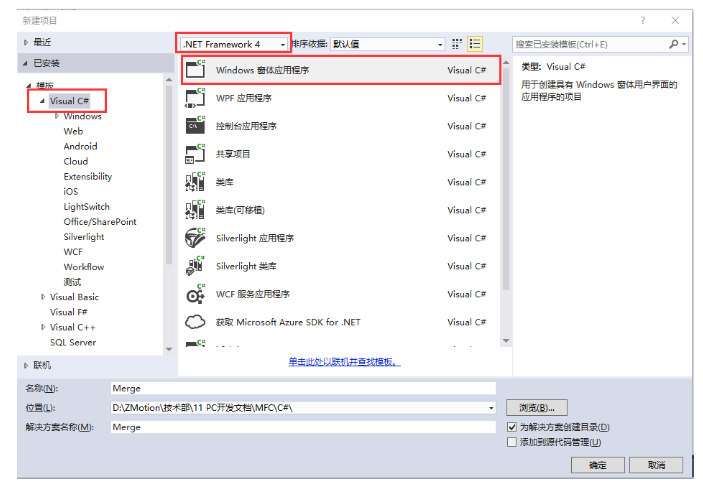
2.选择开发语言为“Visual C#”和.NET Framework 4以及Windows 窗体应用程序。
3.找到厂家提供的光盘资料里面的C#函数库,路径如下(64位库为例):
A、进入厂商提供的光盘资料找到“8.PC函数”文件夹,并点击进入。

B、选择“函数库2.1”文件夹。
C、选择“Windows平台”文件夹。
D、根据需要选择对应的函数库这里选择64位库。
E、解压C#的压缩包,里面有C#对应的函数库。
F、函数库具体路径如下。
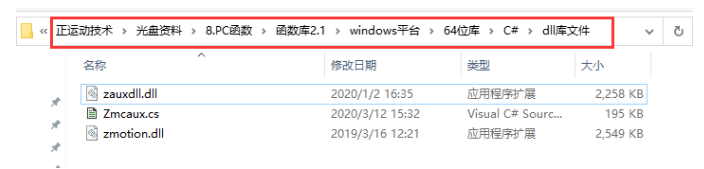
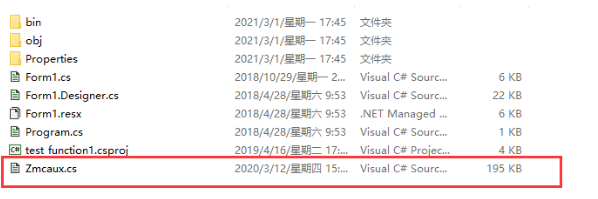
4.将厂商提供的C#的库文件以及相关文件复制到新建的项目中。
A、将zmcaux.cs文件复制到新建的项目里面中。
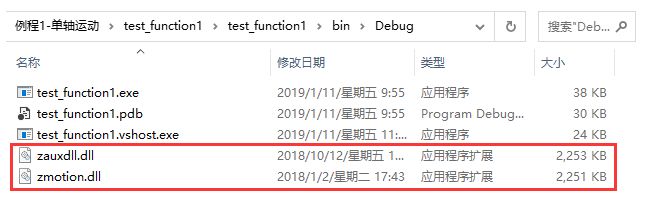
B、将zaux.dll和zmotion.dll文件放入bin\debug文件夹中。
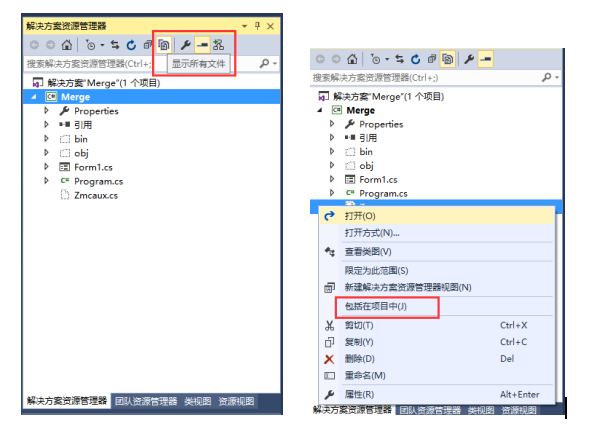
5.用VS打开新建的项目文件,在右边的解决方案资源管理器中点击显示所有,然后鼠标右键点击zmcaux.cs文件,点击包括在项目中。
6.双击Form1.cs里面的Form1,出现代码编辑界面,在文件开头写入 using cszmcaux,并声明控制器句柄g_handle。
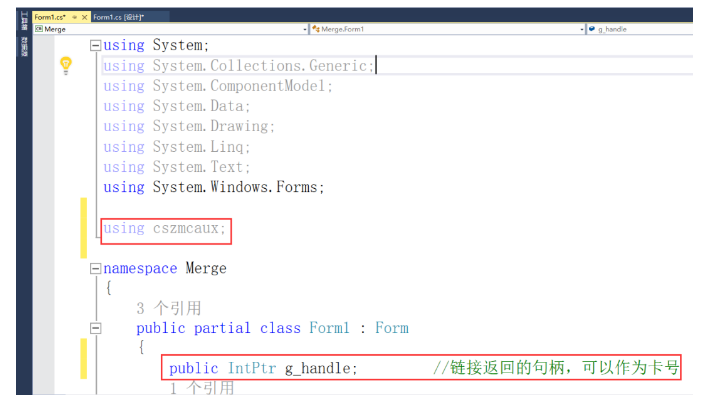
至此项目新建完成,可进行C#项目开发。
单轴运动例程的具体开发过程此处不做详细描述,详情可以查看正运动小助手,《EtherCAT运动控制卡的硬件接线与C#单轴运动控制》文章。
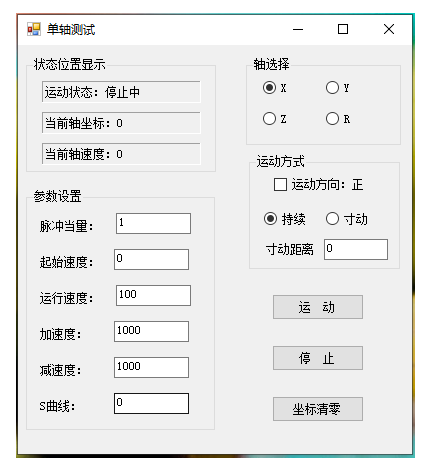
单轴运动控制人机交互界面如下。
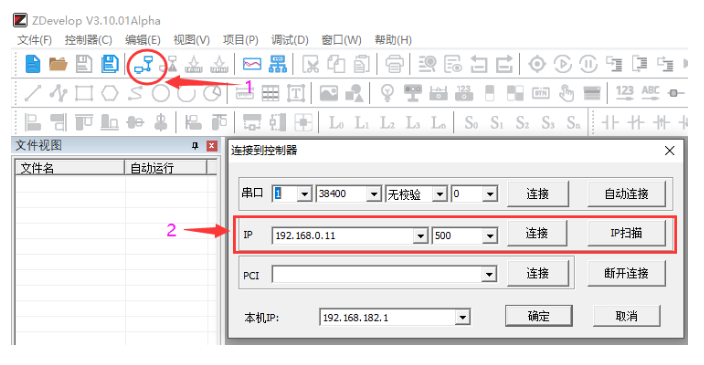
三 、辅助调试工具ZDevelop功能
编译运行例程,同时连接ZDevelop软件进行调试,对运动控制的轴参数和运动情况进行监控。
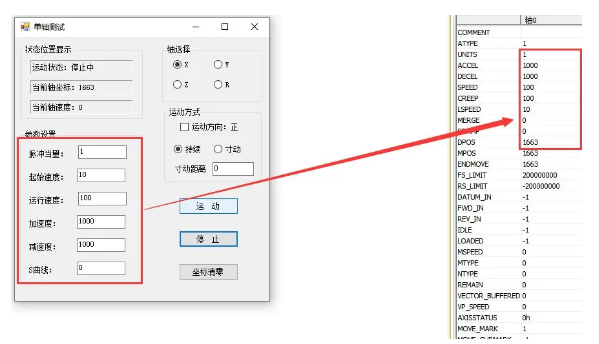
1.轴参数
在操作运行的过程中可以同时通过ZDevelop软件进行监控对应的轴参数查看位置速度加速度等参数,同时也可以通过查看轴状态参数查询当前控制器是否进行报警。
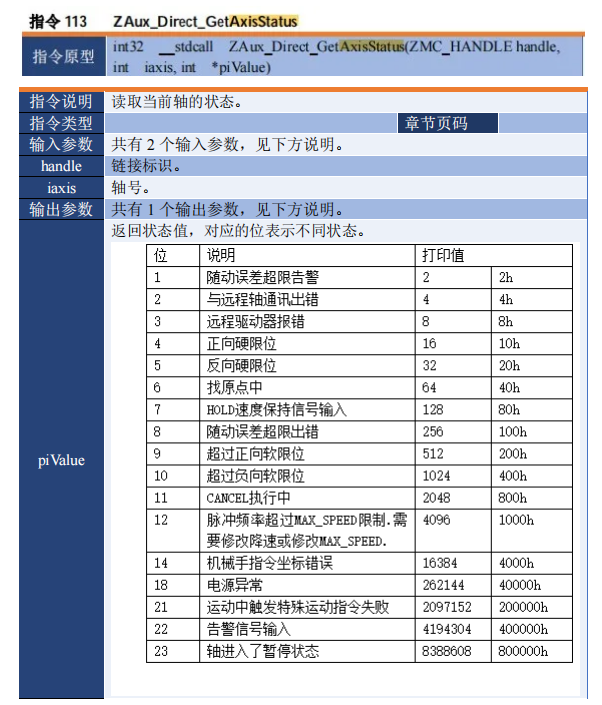
在运动进行的过程中,如果触发了某个轴的报警信号,那么在AXISSTATUS的参数部分将会显示出对应的轴报警码,可通过ZDevelop帮助文档进行查询AXISSTATUS轴状态指令,查询当前的报警码,并进行对应修正即可。
报警码列表如下:
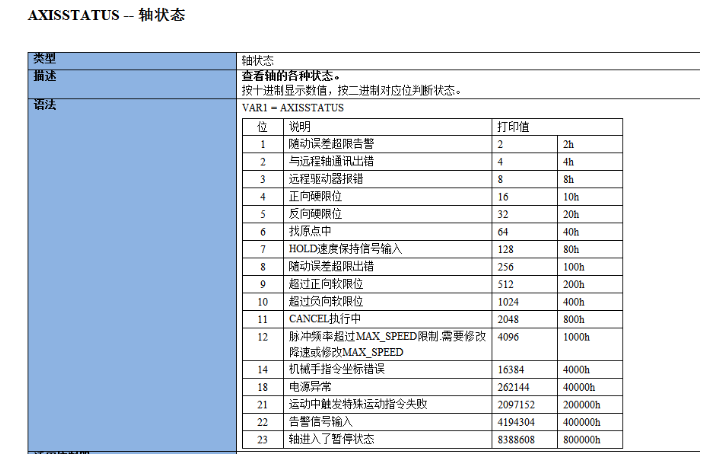
上位机函数中也可通过函数接口进行查询当前轴状态对应上位机查询接口为:ZAux_Direct_GetAxisStatus。
具体说明如下:
2.示波器
示波器属于程序调试与运行中极其重要的一个部分,用于把肉眼看不到的信号转换成图形,便于研究各种信号变化过程。示波器利用控制器内部处理的数据,把数据显示成图形,利用示波器可以显示各种不同的信号,如轴参数、轴状态等。在“视图”—“示波器”中打开示波器窗口或点击菜单栏快捷按钮,通过示波器的波形我们可以准确观察到上位机软件进行的运动的波形,以及各种参数对应的运行过程中的变化,我们都可以从示波器中看出来。
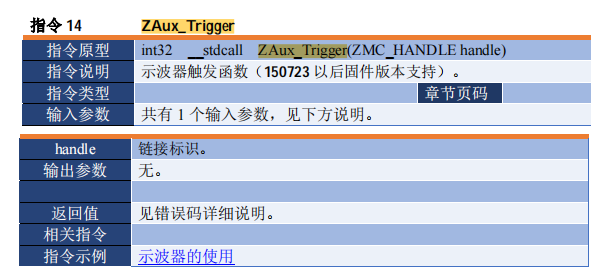
示波器必须先启动后触发才能成功采样。打开示波器设置好相关参数之后点击启动,可手动触发采样,也可在上位机程序里加入ZAux_Trigger函数自动触发示波器采样。
ZAux_Trigger函数是进行示波器触发抓取波形的一个函数,主要是为了方便在使用上位机开发调试过程中利用ZDevelop软件进行抓取对应波形出来进行分析调试的一个函数接口,方便在使用过程中无需进行手动触发示波器的抓取,可以自动进行触发。
函数说明如下图:
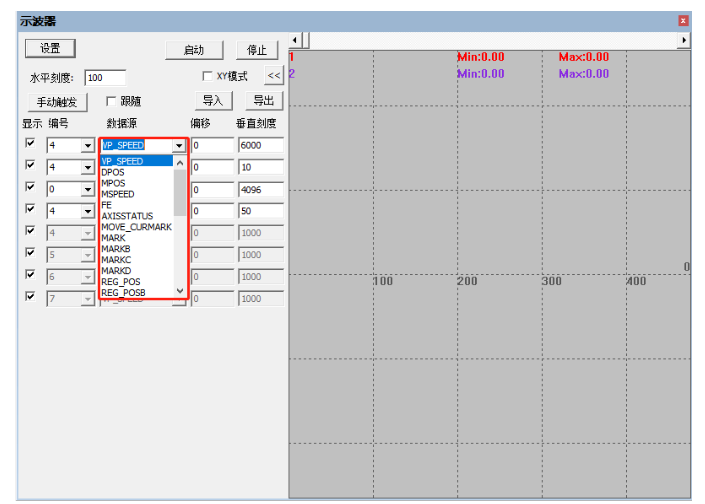
在示波器中可抓取出轴位置,轴速度等各种参数观察当前运动的状态。
如下图所示:
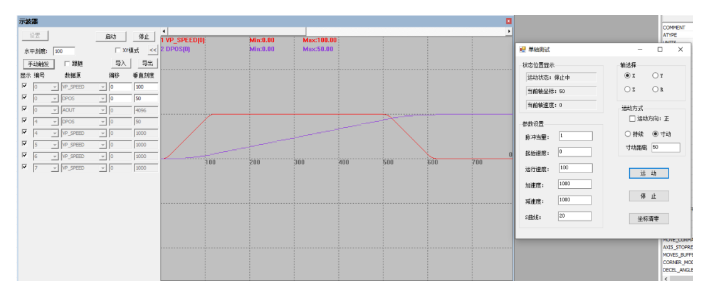
例:
以C#单轴运动例程为例轴寸动距离50速度设置100,速度波形曲线以及位置曲线可以从图中很明显的看出来。
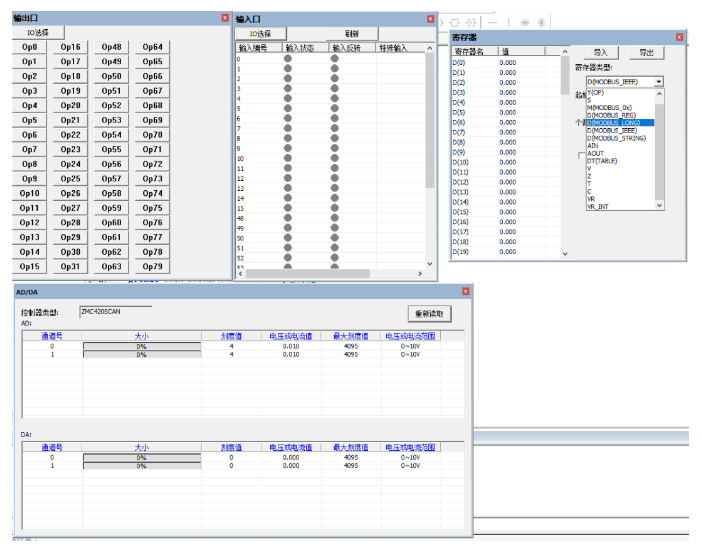
3.输入输出
在ZDevelop软件中还可以进行监控硬件的输入输出,AD、DA能量的大小以及各种硬件寄存器内部存储内容,如下图所示:
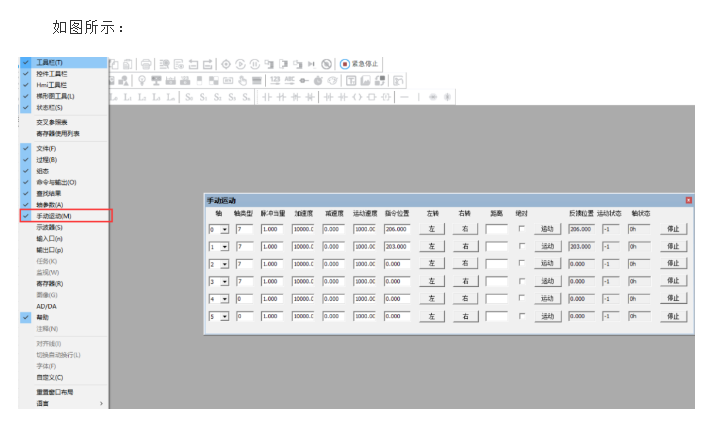
4.手动运动
在ZDevelop软件中可直接进行操作手动运动视图,进行对应的轴操作运动,此功能可以帮助判断,上位机驱动轴操作进行不成功时,若手动运动不成功,可能是硬件接线问题或者驱动器设置问题,若手动运动成功进行,那么则是上位机代码实现存在一定问题,需要进行修改。
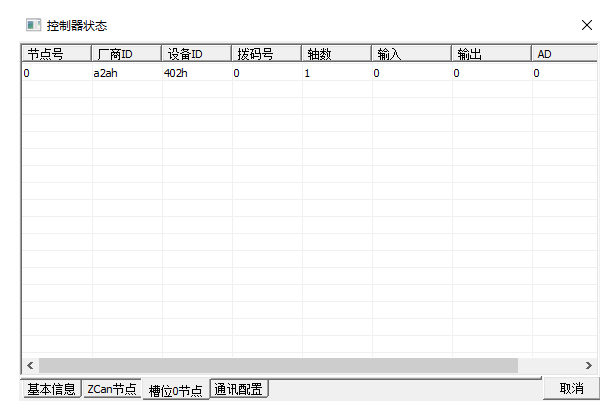
5.远程IO的扩展
通过ZDevelop软件还可以进行查看通过can通讯连接的扩展板当前状态以及通过EtherCAT总线连接的设备信息。
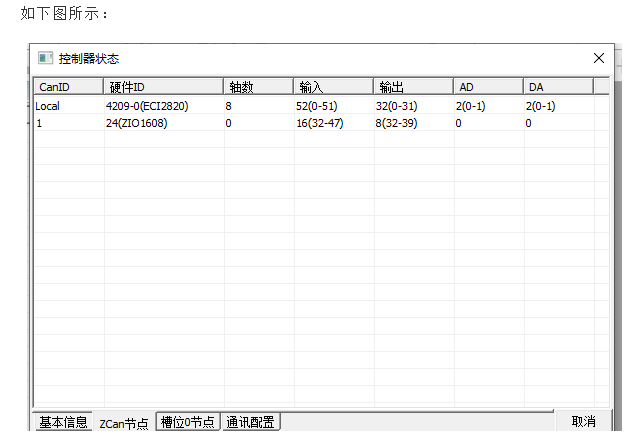
在进行总线控制之前,需要进行控制器的总线初始化程序的加载,加载完成后才能进行对应驱动,详细控制过程可参考文章《EtherCAT运动控制卡的总线轴参数设置和轴运动》。
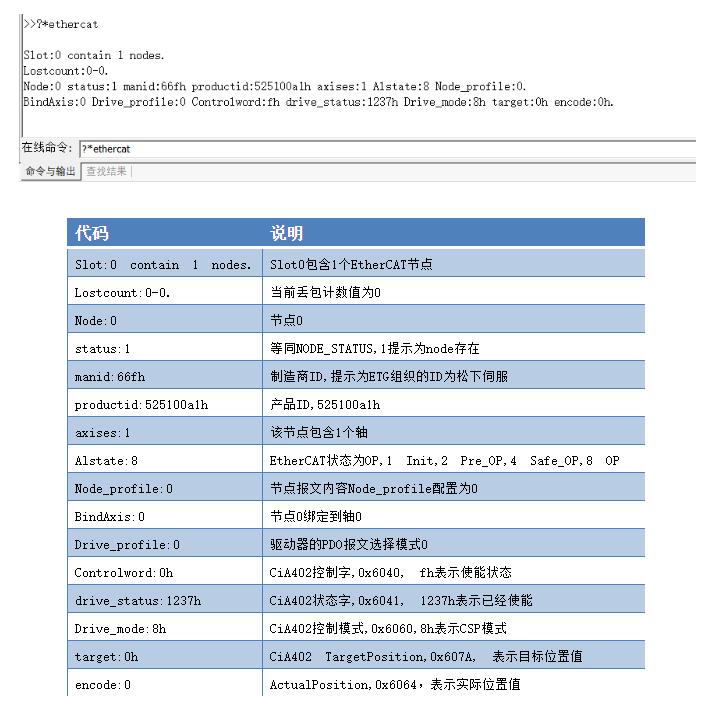
6.快速诊断与调试EtherCAT伺服
在“命令与输出”中输入“?*ethercat”可以查看各个EtherCAT伺服的状态。
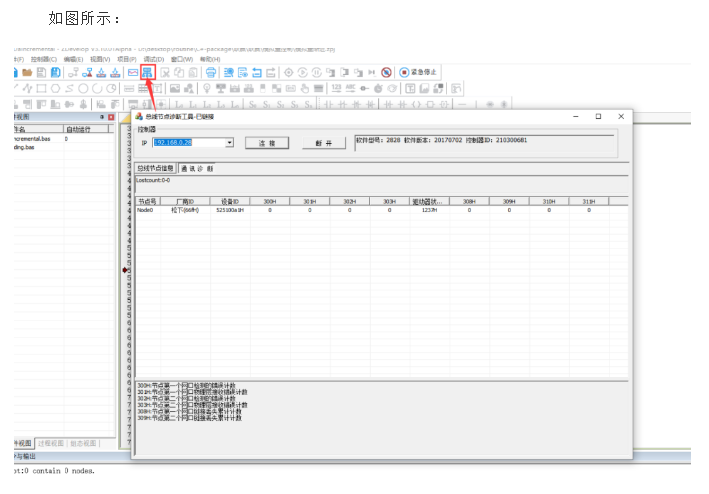
其次可以利用ZDevelop软件上面的总线诊断工具进行连接到控制器对当前连接状态进行判断查看。
本次,正运动技术EtherCAT运动控制卡的辅助调试工具与方法介绍,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师:400-089-8936。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
-
运动控制卡
+关注
关注
7文章
111浏览量
15452 -
ethercat
+关注
关注
18文章
683浏览量
38664 -
正运动技术
+关注
关注
0文章
100浏览量
379
发布评论请先 登录
相关推荐


PCIe EtherCAT实时运动控制卡PCIE464的IO与编码器读写应用

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十四)

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十三)
超高实时性的EtherCAT运动控制卡——PCIE464
【正运动】高速高精,超高实时性的PCIe EtherCAT实时运动控制卡 | PCIE464
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)





 工商网监
工商网监
评论