 智科特移动机器人传感器上装与中台介绍
智科特移动机器人传感器上装与中台介绍
本文约1228个字,预计阅读时间4分钟
★智科特★
移动机器人上装
从普遍的用户需求中析出的移动机器人上装
随着机器人和智能技术的发展和应用,机器人本体产品呈多元化发展,各种形态和市场的定位的移动机器人平台给用户的研究提供了丰富的选择,而各类型传感器也迎来了加速爆发的时代。为选定的移动机器人选择合适的传感器,并快速搭建一个适合而好用的传感器组合,是提升研究的深度,拓宽研究宽度的基础。
智科特移动机器人传感器上装,为已选定平台的移动机器人用户,提供便捷和稳定的传感器集成方案。


客户痛点
集成耗时大,且需要具备交叉学科背景的专门人才
大多数移动机器人产品都只是纯底盘,需要用户自行增加传感器、外部设备与主控电脑,因此客户常常面临以下痛点:
①增加设备需要软件、机械、电气等专门的人才,高校团队内往往是面向单一学科
②使用者在完成某些集成工作后,就要面临毕业了,工作难以得到传承
③维护困难,标准化程度并不好
因此,我们根据以往的项目经验,研发了移动机器人的标准上装(Mobile robots' Tops):
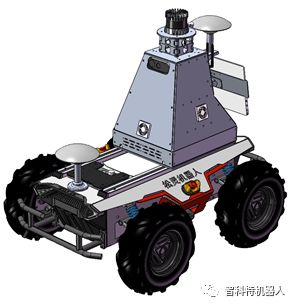

图:无臂上装与有臂上装
智科特上装特点

传感器丰富:包括32线激光雷达、深度摄像头、差分GPS、高精度IMU、主控制器、显示器,可选配机械臂。基本囊括大部分的使用场景。
适配多款移动机器人:现在已经适配Clearpath移动机器人与松灵移动机器人,未来还将适配更多品种
ROS包完善:我们已经把传感器驱动与硬件的ROS包编写完善,用户可以做到开机即用
★ 智科特★
智能机器人中台
为降低移动机器人的使用门槛研发的智能机器人中台
机器人中台也是智科特团队为了降低用户对于移动机器人的使用门槛研发的一款上位机软件。
现阶段,大量的移动机器人基于ROS开发,但是在实际应用过程中,许多用户其实不想所有基础操作都在ROS中完成,因此我们就开发了这款面向底层为ROS开发的移动机器人的机器人Web端交互界面。通过Web页端访问,用户可以使用电脑、ipad进行编排,无需安装额外的软件。
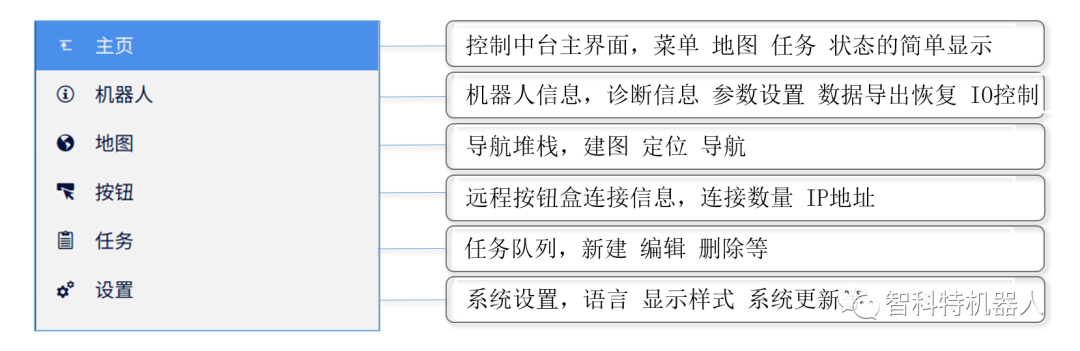
中台主要功能
基础控制、地图构建与编辑、任务编排与执行
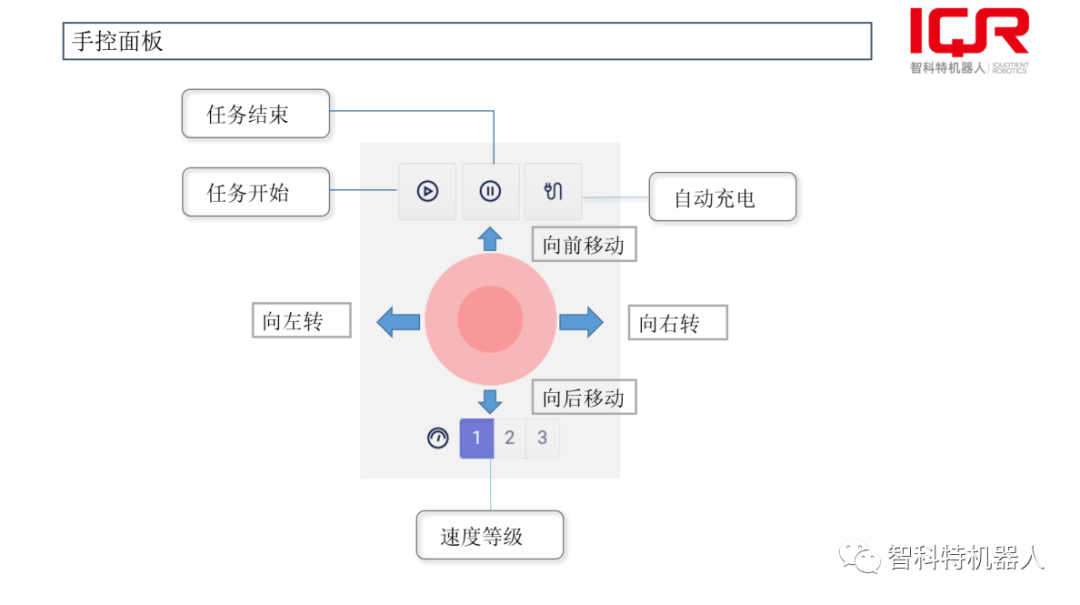
①基础控制功能,我们可以通过界面端,快速设置与控制机器人。
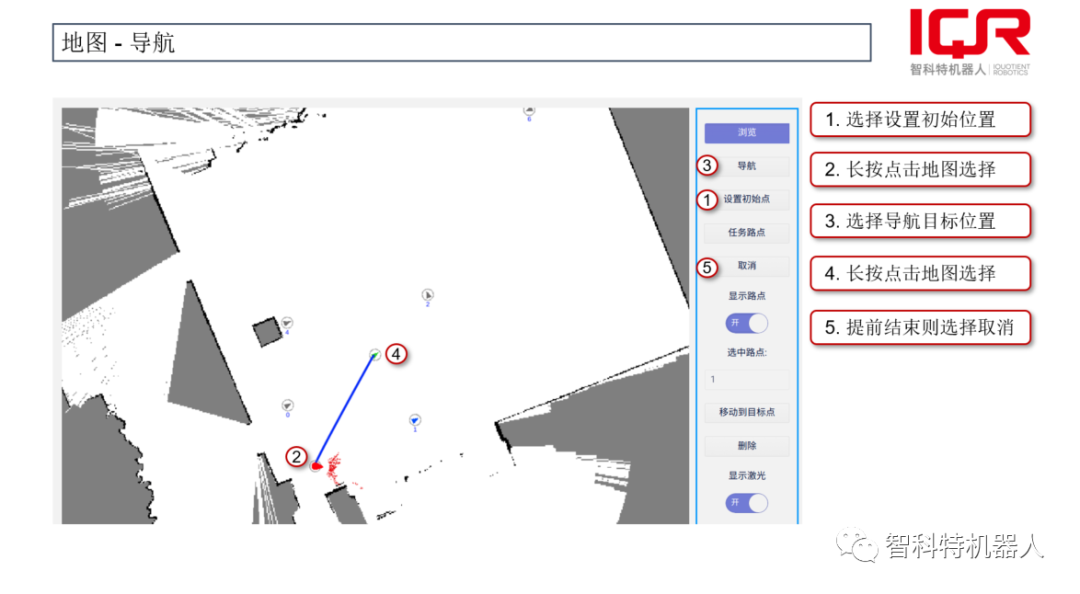
②通过地图构建与地图编辑功能,我们可以快速在WEB端进行机器人地图构建,地图保存,设置目标位置与编辑地图。
③机器人任务设置栏目中,我们可以把机器人的运动分成多个"任务"进行聚合,快速编辑机器人多任务。
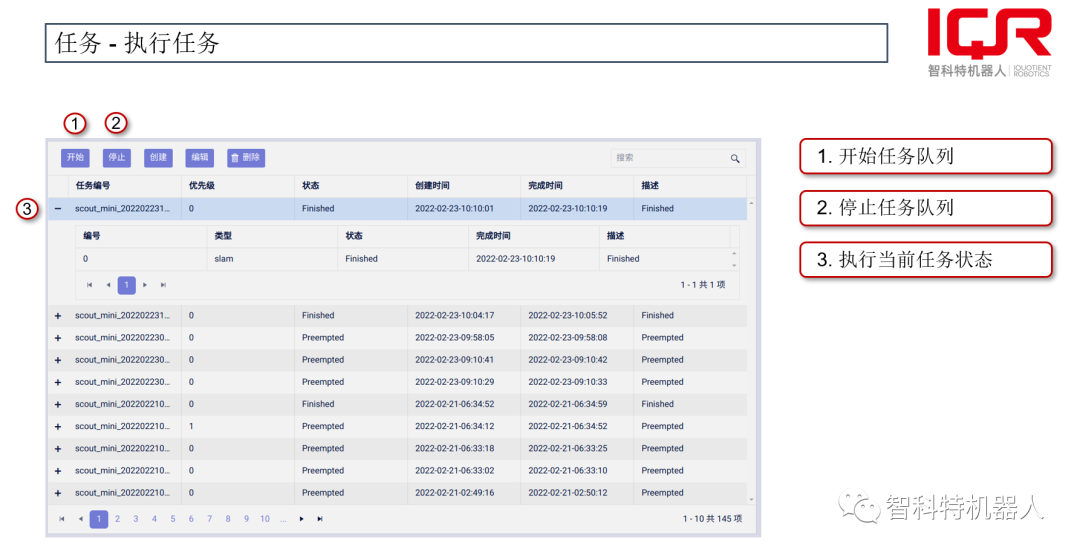
同时,中台具备外部接口的,用户可以通过网络给中台发送任务让机器人执行。支持外部程序、设备通过MQTT协议添加任务,进一步扩展智能中台的运用范围。
我们希望通过不断迭代更新的机器人中台软件,服务更多的客户,让机器人操作更加简单。
关于我们
北京智科特机器人是一家专业研发、集成、销售高性能、高稳定性的机器人专业技术公司。我们的愿景是成为国内一流研究型机器人本体科研解决方案服务提供商与机器人在垂直细分领域的落地者和传播者。通过满足广大用户的多样性需求,基于用户的多样性反馈中研发与迭代产品,让机器人技术造福更多领域。
-
传感器
+关注
关注
2550文章
51056浏览量
753268 -
机器人
+关注
关注
211文章
28399浏览量
207001
发布评论请先 登录
相关推荐
宜科电子荣获双年度移动机器人行业优质供应链奖
思岚科技荣获双年度移动机器人优质供应链奖
移动机器人的技术突破和未来展望

自主移动机器人如何实现传感器融合
智能移动机器人系统方案指南

新松移动机器人批量进军欧洲新能源市场
智能移动机器人

如何借助恩智浦MCX系列MCU纠错功能,打造可靠安全的移动机器人?

移动机器人四大赋能技术及NXP解决方案,本文总结全了!
海康机器人第100000台移动机器人下线
先进传感器提升自主移动机器人的控制能力介绍

自主移动机器人(AMR)功能和特点

富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
5个问题,洞悉自主移动机器人未来发展方向







 工商网监
工商网监
评论