 「智科特闲谈」三石讲堂又开课,室外机器人上装集成简单讲
「智科特闲谈」三石讲堂又开课,室外机器人上装集成简单讲
智科特集成案例
今天,主要想聊一下两个最近的集成案例,一个是ClearpathJackal的案例,一个是松灵Bunker的案例,因为这两个案例我觉得有一些共通的地方,我和星雨主要是讲一下需求方面,三石主要是从技术方面讲,之后抽一些共性。(飞潺)

jackal需求

飞潺
Jackal这边的需求,当时甲方提这个需求的时候,一个目的是为了做组合导航,另一个目的是做环境感知,当时用户对传感器有一些了解。项目主要的包含的东西有差分GPS,三维激光雷达,还有双目摄像头,以及一个移动机器人底盘,当时客户选的时候要求就是在室外能运行就行,然后没有别的什么特殊的需求,国外的论文里边经常看到有Jackal,于是就选了Jackal。
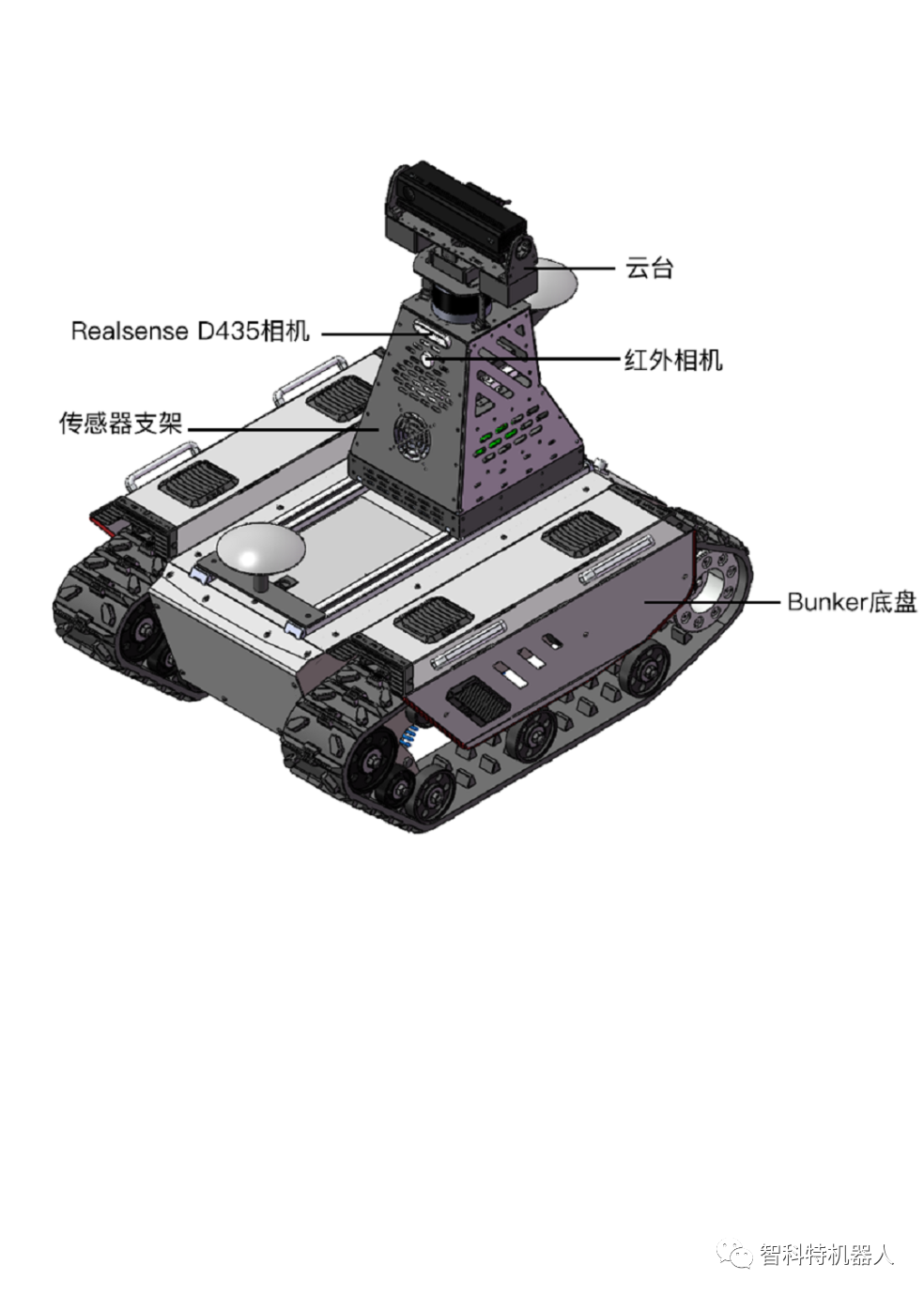
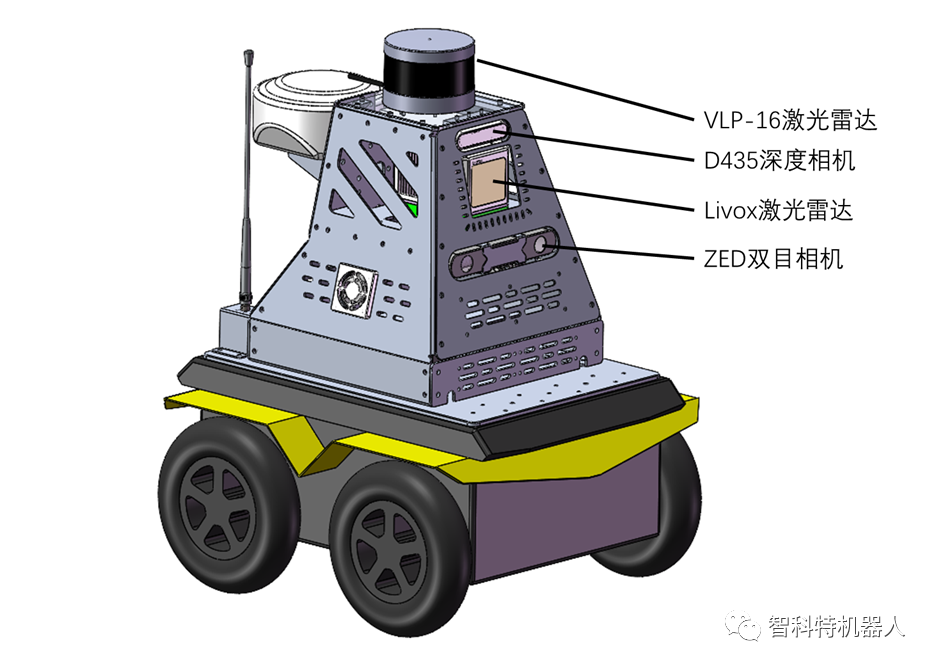
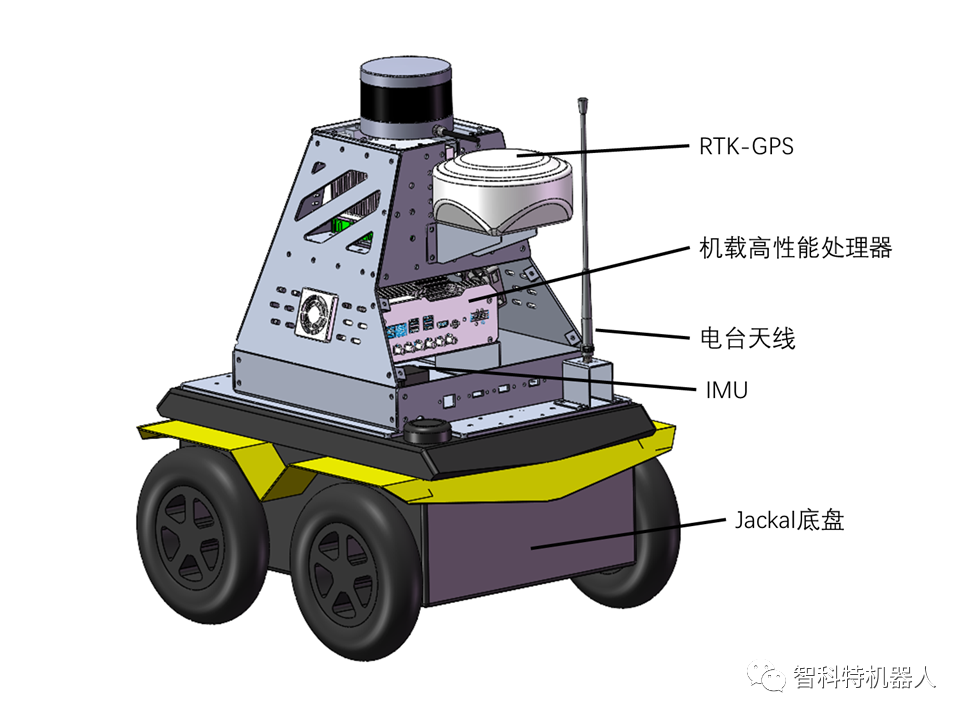
左:bunker示意图 右:jackal示意图
星雨

bunker需求
当时是去年10月份浙大那边的同学找到我,他们当时想做一个排爆机器人,客户是看到我们官网上做的双臂的机器人,双臂加上husky,但是可能超出了预算,所以需要缩减预算去做。
同样的机器人通过性要求的前提下,缩减费用,我们可能考虑先换掉husky,用bunker来代替它,然后可以实现需求。
后续由于机械臂是kinova,进口的会有价格相对较高一点,然后可能一时半会也用不上机械臂,就把机械臂去掉了,一开始,这台机器人的作用的话就相当于采集一些数据,主要是一些气体传感器,包括甲烷、一氧化碳传感器,加一台红外相机以及普通相机,最后定的话,按照需求方的那边的整体的预算来做,基本就是一个车集成一些相应的传感器。
三石
智科特主讲
一、系统构成+二者共性和个性
系统构成,所有机器人产品,所有咱们公司的机器人产品系统构成基本上都是一样的,底盘一大类,机械臂一大类,传感器一大类,处理器一大类。都是由这几方面构成的。


这两个产品它有一定的共性,但是共性的地方是一种比较抽象的共性,他们都可以完成一定的就是室外的,比如说探测、侦查、或者是环境感知这类的任务。
不同的地方是第一他们搭载的传感器不一样,对吧?(对!)
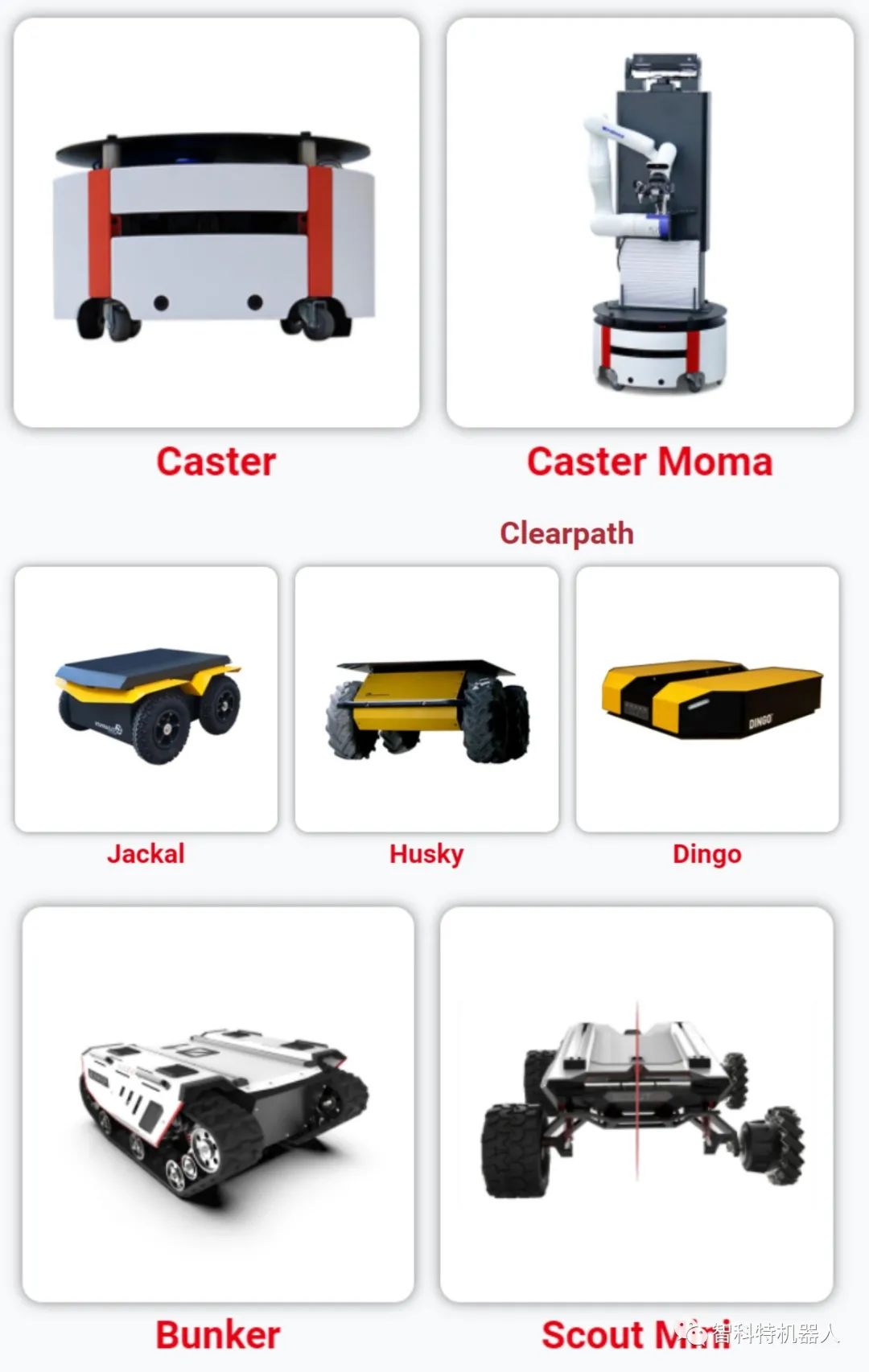
第二他们对于室外环境的要求也不一样,Jackal的话,它就相对来说要一个比较平坦的地方。像bunker的话,履带式的机器人你知道吧,它的通过性会比jackal更强。

bunker实地测试
所以说,他们都是室外环境感知类的机器人,但是他们对于室外的环境还是有不同的要求的,Jackal它只能适应一些就像厂区园区这种比较平坦地方,然后像bunker的话就可以适应一些野外不那么平的地方,有一些崎岖或者有一些障碍物。
二、设计难点
娟娟:
在设计的过程中,你会觉得哪一方面是首要需要考虑的?
三石:
供电是需要考虑的,供电电压不一样,可能就需要后期提供不同电压,可能就麻烦一点。

(智科特电源板:我的机会来了!)
娟娟:
硬件方面传感器架子很高的话,会不会影响它平衡呢?
三石:
会,这时候需要做一个区分,架子高了之后,它可能底盘整个机器人的重心会高,他可能会有倾覆的危险,然后但是的话你传感器太低之后可能就是看不到一些东西,所以你在设计上需要做一定的取舍,让他在一个比较合适的位置就可以了,就不至于太高让它倾覆,也不至于太低,导致它什么东西都看不见。
娟娟:
现在有没有更好的解决办法?
三石:
现在暂时没有更好的解决办法,现在这种形式已经是第一,成本比较低,第二它质量比较轻,第三还比较美观的一种方式,目前公司所有的Jackal的集成都是我来做的,现在这种这种就稍微好看一点点。
娟娟:
哈哈哈我们设计对外观是有要求的!
娟娟:集成完毕测试的时候是主要测试哪些方面?
三石:传感器会在单独测试的时候测,主要是一些比如说你的机器人到底适不适用这种产品,这种大的测试,我们没有实际的场景,你的机器人到在特定的场景到底跑的是顺利不顺利,会遇到什么问题,这种是测试咱们是没有的。
小剧场——这没有什么难度(doge)
娟娟
这两款产品的工时和难度怎么样?
三石
这两个的实际的执行日期,可能都差不多一个月就完成了,没有什么没有什么比较复杂的地方。
娟娟
集成过程中我们的优势在哪里?
三石
完成像这么一个项目,我觉得我们的优势就是在于我们的反应速度会比别人快。
我们从设计加工组装,然后到软件开发完成,可能就是一个月的时间,如果加工时间更短,我们可能用不了一个月,换句话来说就是我们的经验比别人多,但这对这种东西的话就是属实没有什么难度。
三、愿景
飞潺
有没有可能把这种上装的东西,我们就当成标准化产品售卖,我就realsense三维激光雷达差分GPS,然后形成一个标准的模组,然后我就提前生产一台,然后有这种后头一装有这样后一装。
三石
可以,松灵bunker那套跟jackal这套都可以,反正改起来也好改,就把有一些传感器拆掉就可以。
飞潺
你觉得这一类型的机器人它的应用领域它有实际的落地的可能性吗?大范围的使用的可能性,比如说像浙大他们想做的这种排爆的机器人,它如果是到各个领域,它还差什么样的技术,它才能就是小批量的落地,我就先不说大批量的落地。
三石
主要是软件上,硬件上的话就是该有的都有,反正可能就是软件上,那样的话可能需要更智能一点,现在的机器人还是太笨了。
飞潺
确实是这样。
北京智科特机器人是一家专业研发、集成、销售高性能、高稳定性的机器人专业技术公司。我们的愿景是成为国内一流研究型机器人本体科研解决方案服务提供商与机器人在垂直细分领域的落地者和传播者。通过满足广大用户的多样性需求,基于用户的多样性反馈中研发与迭代产品,让机器人技术造福更多领域。
-
机器人
+关注
关注
210文章
28212浏览量
206568
发布评论请先 登录
相关推荐
科沃斯助力吴中区机器人+人工智能产业发展
优宝特机器人完成数千万元融资
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
泰科机器人携新款行星滚柱丝杠线性关节模组和双臂协作机器人亮相2024年ITES深圳工业展

出海业务 | 稳石机器人高质量海外项目交付,持续Go Glocal!

珞石机器人完成超5亿元融资,深度参与小米SU7研发制造
引领企业物流革新,稳石AMR机器人助力智能制造再升级

珞石机器人近期宣布成功完成了超5亿元的战略+轮融资
参考设计!空调室外机控制电路
机房精密空调室外机不运行的原因及解决措施
广和通AI解决方案“智”赋室外机器人迈向新天地!
广和通AI解决方案“智”赋室外机器人迈向新天地!

使用 NVIDIA Isaac 仿真并定位 Husky 机器人






 工商网监
工商网监
评论