 「智科特案例」移动机器人如何耕好田
「智科特案例」移动机器人如何耕好田

我们做了个大型移动机器人在田里翻滚的项目。
甲方给我们提的需求是:
“我们想要一个移动机器人代替人工在复杂的农田环境巡视:采集农田、果园中的图像并进行收集,通用性要比较好,形成一个终端图像信息采集系统,用于后端图像分析。最好还能实现建图、导航、自主避障。如果可以的话,最好能固定四个点然后在田里跑个弓字形,实现田地全覆盖。”
根据甲方需求,我们做了这么一套系统模块:
功能上我们做了室外建图定位导航、远程控制和数据采集,重点还是弓字型循迹。弓字型在很多农业应用中都能用得上,也可以适配各种移动平台,这套软件功能我们高度集成化构建,为日后我们爆改别的农机打下了坚实的基础。
循迹我们用的包是Gerona,这个包,包括给定地图上的路径规划、控制机器人沿着该路径行驶以及行驶时的避障。是一个模块化的、易于扩展的框架。
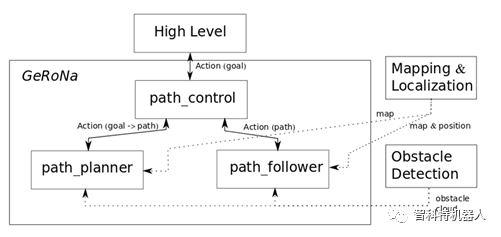
图 Gerona框架
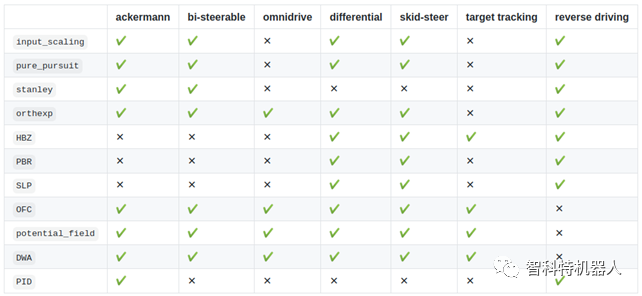
图不同结构机器人类型与能够使用的循迹控制算法
具体效果可以看我们文末的测试视频。
传感器搭载了三维激光雷达、深度摄像头、双目摄像头和PTZ摄像头,以及外配的一个IMU和差分GPS,我们作为国内唯二Clearpath的代理商,拿着Warthog一顿爆改。

硬件部分,主体是基于Clearpath Warthog搭建, Warthog是Clearpath系列里面最大的型号,还是一款水陆两栖的移动机器人(对没错,它能在水里游)。

花絮
农业智能化在国内大有可为,我们也做了一些技术储备,今年晚些时候会发布一些好玩的功能特性,也请大家多多支持。

小伙伴在田里测试(被南京的蚊子咬)

小伙伴在路上测试(被南京的蚊子咬)

小伙伴在厂里测试(被南京的蚊子咬)
北京智科特机器人是一家专业研发、集成、销售高性能、高稳定性的机器人专业技术公司。我们的愿景是成为国内一流研究型机器人本体科研解决方案服务提供商与机器人在垂直细分领域的落地者和传播者。通过满足广大用户的多样性需求,基于用户的多样性反馈中研发与迭代产品,让机器人技术造福更多领域。
-
机器人
+关注
关注
214文章
31624浏览量
224343
发布评论请先 登录
大象机器人正式发布myAGV Plus新一代移动机器人平台
电压放大器在四足压电移动机器人运动输出特性实验中的应用

探索 NXP MR - CANHUBK344 评估板:为移动机器人应用赋能
MR-VMU-RT1176快速上手:开启移动机器人车辆管理单元设计之旅
MR-BMS771参考设计:适用于移动机器人的电池管理系统
Infineon移动机器人电机控制方案深度解析
Infineon DEMO_IMR_BMSPWR_V1:移动机器人电池管理系统的卓越之选
Infineon DEMO_IMR_BMSCTRL_V1:助力移动机器人电池管理的创新方案
移动机器人“芯”引擎爆发,禾赛、海思新品逆袭

安森美产品如何助力打造下一代自主移动机器人
移动机器人技术的发展历程
恩智浦自主移动机器人设计要点





评论