 启明云端分享|ESP32-C3 IO口控制灯的应用及串口通信示例
启明云端分享|ESP32-C3 IO口控制灯的应用及串口通信示例

启明云端作为乐鑫代理,一直都尽最大可能做完善的教程能帮助更多的开发小伙伴快速上手各种应用;今天小明为大家带来ESP32-C3通过IO口控制灯及串口通信演示;每一个步骤我们都分享出来供小伙伴们参考!
1.指定芯片
编译前应注意应先设置目标芯片 设置指令 :

idf.pyset-targetesp32c3
注意,此操作将清除并初始化项目之前的编译和配置(如有)
否则将报错 如下 :

默认配置为ESP32如果使用的是ESP32的话则不需要这句
idf.pyset-targetesp32c3
2.烧入已经生成的文件

编译, idf.py -p COM5 flash 烧入
3.硬件连接

注意:接线 : 18脚接rgb灯的 G段显绿色 19接rgb灯的B段;显示为青色, 这里的18可以和19调换, 因为点亮的时间与强度一致
4.GPIO初始化
接着最简单也是最重要的IO初始化及输出
gpio_config_tio_conf; //创建io配置结构体
io_conf.intr_type=GPIO_INTR_DISABLE; //禁用中断
io_conf.mode=GPIO_MODE_OUTPUT; //设置为输出模式
io_conf.pin_bit_mask=GPIO_OUTPUT_PIN_SEL;
//io脚位掩码,用位运算左移到需要改变的位进行操作
//#defineGPIO_OUTPUT_PIN_SEL ((1ULL/(1ULL/该宏便是先将1强转类型为无符号长整型左移再或运算使得18,19一起配置为输出
io_conf.pull_down_en=0; //下拉模式使能关闭
io_conf.pull_up_en=0; //上拉模式使能打开
gpio_config(&io_conf); //gpio配置
5.输出控制
输出已经配置好了
gpio_set_level(GPIO_OUTPUT_IO_0,0); //18脚设置为低电平
gpio_set_level(GPIO_OUTPUT_IO_1,1); //19脚设置为高电平
6.接收初始化
这个时候输出已经好了,接着便是接收
//interruptofrisingedge
io_conf.intr_type=GPIO_INTR_POSEDGE; //设置上升沿中断
//bitmaskofthepins,useGPIO4/5here
io_conf.pin_bit_mask=GPIO_INPUT_PIN_SEL; //io脚位掩码,用位运算左移到需要改变的位进行操作
//setasinputmode
io_conf.mode=GPIO_MODE_INPUT;//设置为输入模式
//enablepull-upmode
io_conf.pull_up_en=1;//上拉模式使能打开
gpio_config(&io_conf);
接收有中断接收和读取IO电压接收
中断接收优点 : 相对于实时读取
读取IO优点 : 简单易操作
7.获取输入电平
读取IO :
Int IO0_level = gpio_get_level(GPIO_INPUT_IO_0); /*返回值为读取的IO_0的高低电平*/
中断加线程 :
//changegpiointrrupttypeforonepin
gpio_set_intr_type(GPIO_INPUT_IO_0,GPIO_INTR_ANYEDGE);
//改变一个pin的中断类型
//createaqueuetohandlegpioeventfromisr
gpio_evt_queue=xQueueCreate(10,sizeof(uint32_t)); //创建一个新的队列
//startgpiotask
xTaskCreate(gpio_task_example,"gpio_task_example",2048,NULL,10,NULL); //开线程跑函数gpio_task_example
//installgpioisrservice
gpio_install_isr_service(ESP_INTR_FLAG_DEFAULT); //为相应的GPIO引脚添加ISR处理程序
//hookisrhandlerforspecificgpiopin
gpio_isr_handler_add(GPIO_INPUT_IO_0,gpio_isr_handler,(void*)GPIO_INPUT_IO_0); //为相应GPIO添加ISR处理程序
//hookisrhandlerforspecificgpiopin
gpio_isr_handler_add(GPIO_INPUT_IO_1,gpio_isr_handler,(void*)GPIO_INPUT_IO_1); //为相应GPIO添加ISR处理程序
//removeisrhandlerforgpionumber.
gpio_isr_handler_remove(GPIO_INPUT_IO_0); //删除相应的ISR程序这里测试对应函数功能
//hookisrhandlerforspecificgpiopinagain
gpio_isr_handler_add(GPIO_INPUT_IO_0,gpio_isr_handler,(void*)GPIO_INPUT_IO_0); //再次添加
staticvoidIRAM_ATTRgpio_isr_handler(void*arg)
{
uint32_tgpio_num=(uint32_t)arg;
xQueueSendFromISR(gpio_evt_queue,&gpio_num,NULL);
}
staticvoidgpio_task_example(void*arg)
{
uint32_tio_num;
for(;;)
{
if(xQueueReceive(gpio_evt_queue,&io_num,portMAX_DELAY))
{
printf("GPIO[%d]intr,val:%d\n",io_num,gpio_get_level(io_num));
}
}
}
具体的demo在已下载好的 esp-idf\examples\peripherals\gpio\gpio\generic_gpio
1.再次提醒
编译前应注意应先设置目标芯片 设置指令 :
idf.pyset-targetesp32c3
注意,此操作将清除并初始化项目之前的编译和配置(如有)
否则将报错 如下 :
默认配置为ESP32如果使用的是ESP32的话则不需要这句
idf.pyset-targetesp32c3
这里可以看见TX 发送数据口 4
RX 接收数据 5
2.查看端口号
连接设备 :
Windows 环境 打开设备管理器 找到
按下windows按键/鼠标单击左小角

键盘输入设备管理器

找到 COM和LPT选项

当COM口未连接设备不会有该选项
3.软件讲解
idf.py-p(PORT)monitor
这个PORT即端口号, 如上则是COM3 命令 : idf.py -p COM3 monitor
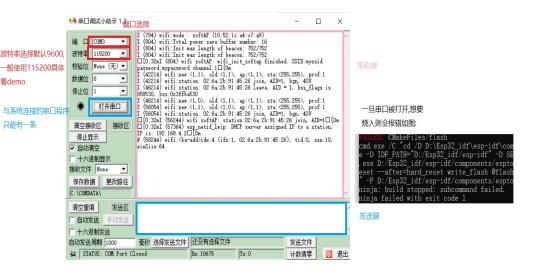
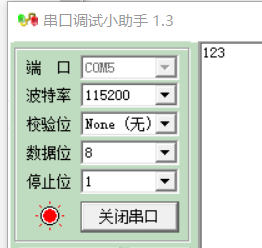
也可以使用简单的串口调试工具
链接:https://pan.baidu.com/s/1zD5JzLBzn72FNymSp4gSAw
提取码:1234
也可以运行以下命令,一次性执行构建、烧录和监视过程:
idf.py-pPORTflashmonitor
4.硬件连接
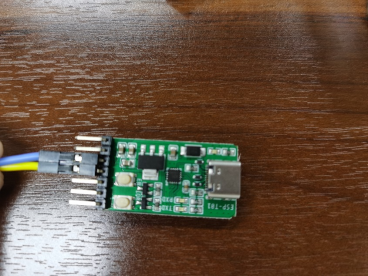
设备连接方式 : 需要用到一个TTL转 USB 模块
比如此转换是TTL转TYPE-C母 在接跟TYPE-C公转USB公接入电脑
 ESP32-T01
ESP32-T01即将发送数据的TX ( 4脚) 连接到转换模块的 RX
接收数据的RX( 5脚) 连接到转换模块的TX ( 发送端)
实现原理 :
假设ESP32-C3的printf 的串口为UART_1
ESP32-C3新配置的串口为 UART_2
5.功能实现
电脑通过串口UART_2发送数据到ESP32-C3
ESP32-C3 使用printf 函数 通过UART1打印给电脑 printf (“%s\n”, data);
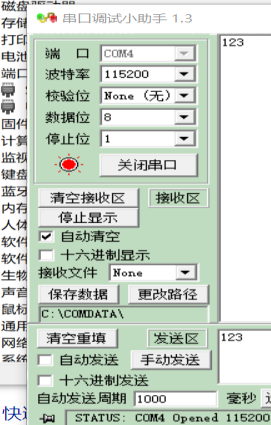
并且通过串口打印到电脑的串口,即可在串口调试小助手上接收
uart_write_bytes(ECHO_UART_PORT_NUM,(constchar*)data,len);
6.Printf 函数测试
第一个demo “hello_word”
即使用printf 函数 向与电脑连接的串口发送数据
好处 : 方便快捷
考虑到线程安全,在FREERTOS中尽量使用ESP_LOGX来输出调试信息和打印消息
/*Printchipinformation*/
esp_chip_info_tchip_info; //芯片信息结构体
esp_chip_info(&chip_info); //获取芯片信息函数,只需将结构体地址传入
printf("Thisis%schipwith%dCPUcore(s),WiFi%s%s,",
CONFIG_IDF_TARGET,
chip_info.cores, /*芯片名称*/
(chip_info.features&CHIP_FEATURE_BT)?"/BT":"",
(chip_info.features&CHIP_FEATURE_BLE)?"/BLE":"");
7.两个串口数据收发代码讲解
接着
uart_config_tuart_config=
{
.baud_rate=ECHO_UART_BAUD_RATE, /*串口波特率*/
.data_bits=UART_DATA_8_BITS, /*串口八位数据*/
.parity =UART_PARITY_DISABLE, /*禁用串口奇偶校验*/
.stop_bits=UART_STOP_BITS_1, /*串口停止位1*/
.flow_ctrl=UART_HW_FLOWCTRL_DISABLE, /*串口数据流控制禁用*/
.source_clk=UART_SCLK_APB, /*时钟源选择来自于APB的时钟*/
}; //串口配置结构体
intintr_alloc_flags=0;
配置第二个串口尝试使用两个串口环路数据测试
下面串口demo路径为 : esp-idf\examples\peripherals\uart\uart_echo
//串口驱动下载函数(TX环形缓冲区,RX环形缓冲区,事件队列句柄和大小,分配中断的标志)
ESP_ERROR_CHECK(uart_driver_install(ECHO_UART_PORT_NUM,BUF_SIZE*2,0,0,NULL,intr_alloc_flags));
//串口配置函数( 串口号,串口配置结构体)
ESP_ERROR_CHECK(uart_param_config(ECHO_UART_PORT_NUM,&uart_config));
//设置通信IO函数(波特率,TXIO,RXIO,RTSIO,CTSIO)
ESP_ERROR_CHECK(uart_set_pin(ECHO_UART_PORT_NUM,ECHO_TEST_TXD,ECHO_TEST_RXD,ECHO_TEST_RTS,ECHO_TEST_CTS));
//Configureatemporarybufferfortheincomingdata
uint8_t*data=(uint8_t*)malloc(BUF_SIZE); //创建一个大小为BUF_SIZE的指针
while(1)
{
bzero(data,BUF_SIZE); //清空指针内残留
// ReaddatafromtheUART 从串口读取数据
intlen=uart_read_bytes(ECHO_UART_PORT_NUM,data,BUF_SIZE,20/portTICK_RATE_MS);
//if(*data!=0) //如果不是默认值则认为该数据为正确值
{
printf("%s\n",data);
}
//WritedatabacktotheUART
uart_write_bytes(ECHO_UART_PORT_NUM,(constchar*)data,len);
}
循环读写, 此读函数不阻塞
8.串口IO查找
找到串口设置的TX RX ( 我这用的软件是VS code , 英文版的右击是 go to definition 推荐选中按f12)
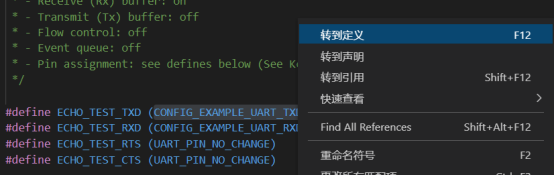

-
串口通信
+关注
关注
34文章
1624浏览量
55507 -
ESP32-C3
+关注
关注
0文章
9浏览量
381
发布评论请先 登录
相关推荐
【AI技术支持】ESP32-C3模组AT+MQTT连接AWS证书问题处理

【AI技术支持】ESP32-C3芯片/模组SPI-AT问题处理
启明云端WT32C3-S6模块,乐鑫ESP32-C3低功耗高性能方案,高效无线连接通信
请问ESP32-C3的USB-CDC例程在哪个目录啊?
ESP32-C3使用SPI通信缓存有多少?
ESP32-C3的USB在计算机上识别的COM口能够干什么用?
请问ESP32-C3蓝牙MESH如何与JDY-24M蓝牙MESH组网通信?
请问esp32-c3不支持pcnt吗?
esp32-c3串口无法下载怎么解决?
启明云端WT32C3系列模组/开发板连接AWS亚马逊云方法
充电桩选型对比:ESP32-S3模组和ESP32-C3模组谁更合适
ESP32-C3开发板设计指南
ESP32-C3模块使用问题集锦| C3的串口日志该如何禁用?





 工商网监
工商网监
评论