 瑞萨e2studio----看门狗WDT
瑞萨e2studio----看门狗WDT


1.概述
本篇文章主要介绍如何使用e2studio对瑞萨进行看门狗WDT配置,并且配置RTC时钟产生1s的周期中断,通过串口打印查看看门狗WDT的计数值。
2.硬件准备
首先需要准备一个开发板,这里我准备的是芯片型号 R7FA2L1AB2DFL 的开发板。
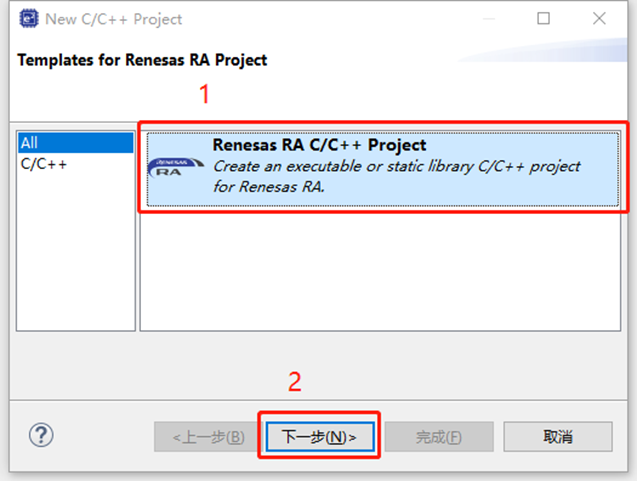
3.新建工程

4.工程模板
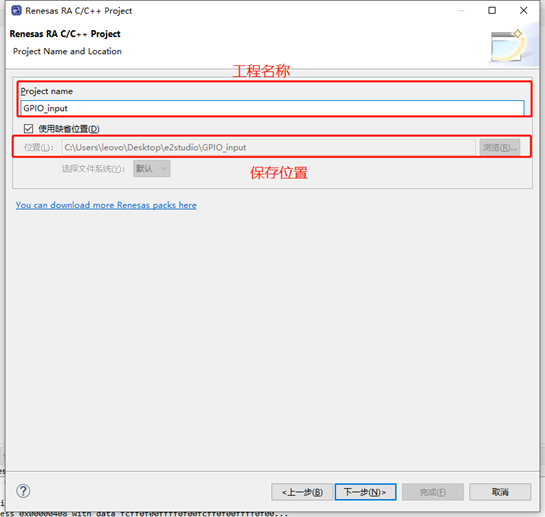
5.保存工程路径
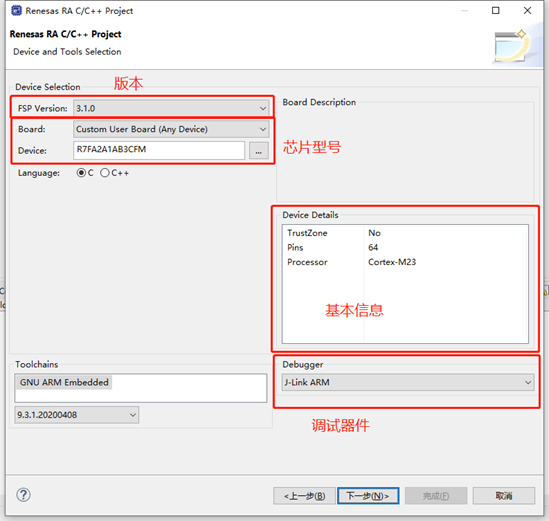
6.芯片配置
本文中使用R7FA2L1AB2DFL来进行演示。
7
7.工程模板选择
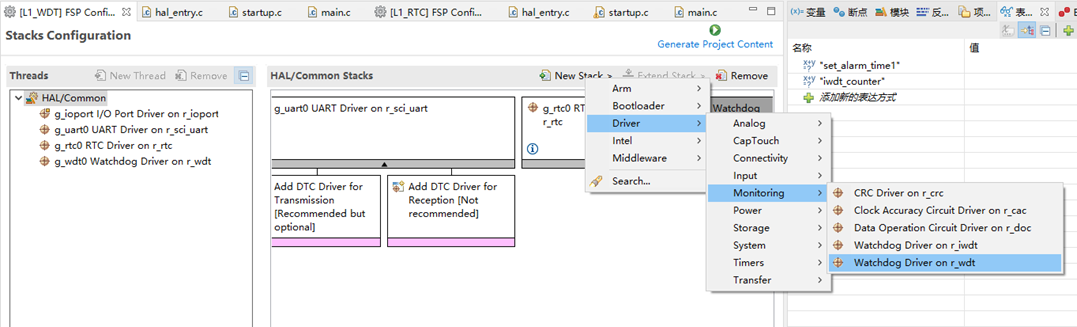
8.WDT配置
点击Stacks->New Stack->Driver->Monitoring -> Watchdog Driver on r_wdt。
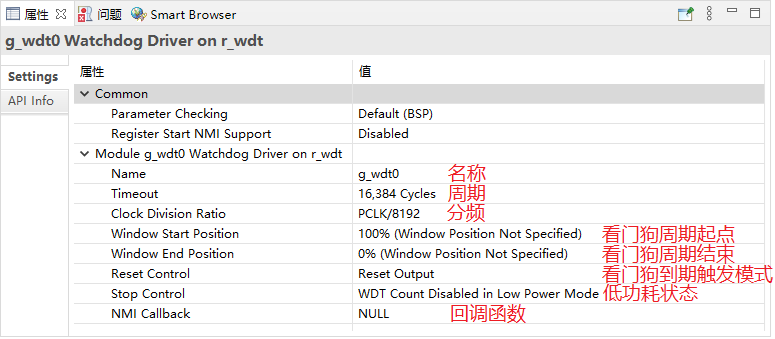
9.WDT属性配置
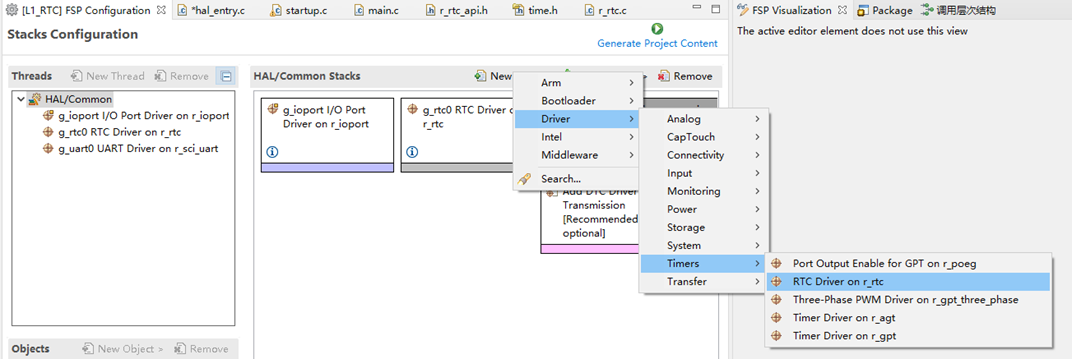
10.RTC配置
点击Stacks->New Stack->Driver->Timers -> RTC Driver on r_rtc。
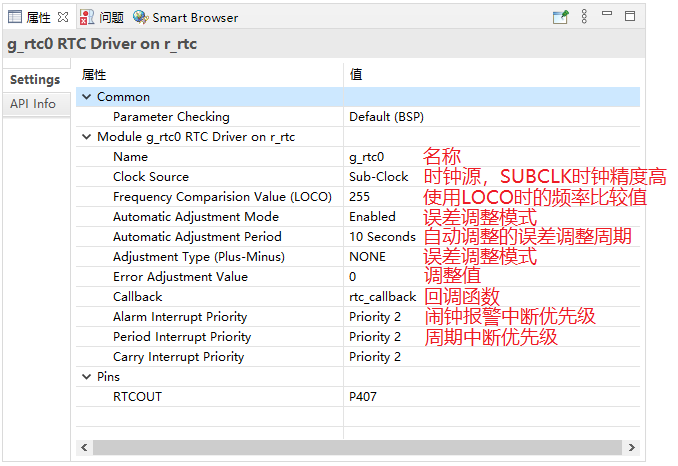
11.RTC属性配置
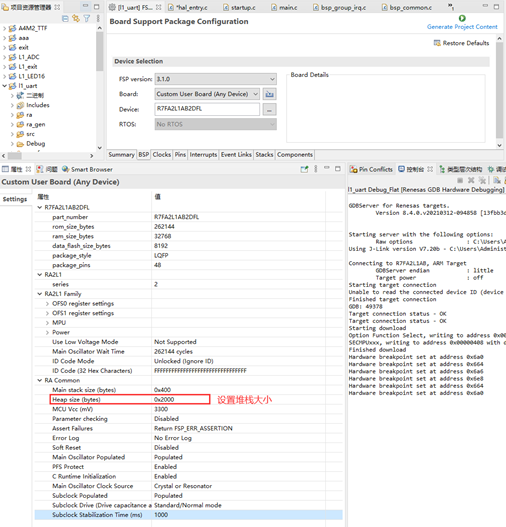
12.设置E2STUDIO堆栈
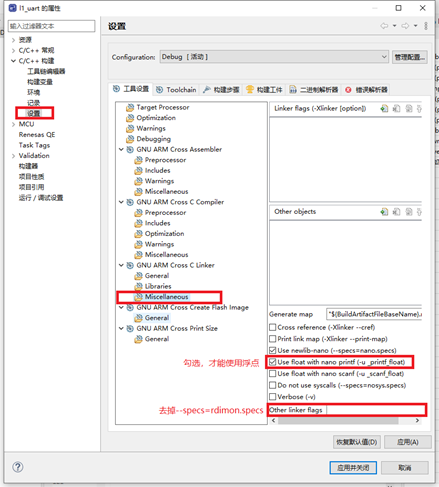
13.e2studio的重定向printf设置
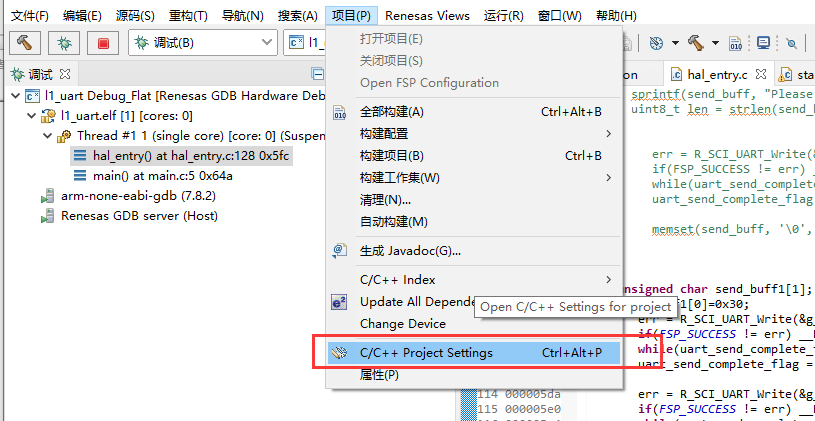
C++ 构建->设置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
14.printf输出重定向到串口
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。
注意一定要加上头文件#include
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i;i++)>
15.R_WDT_Open()函数原型
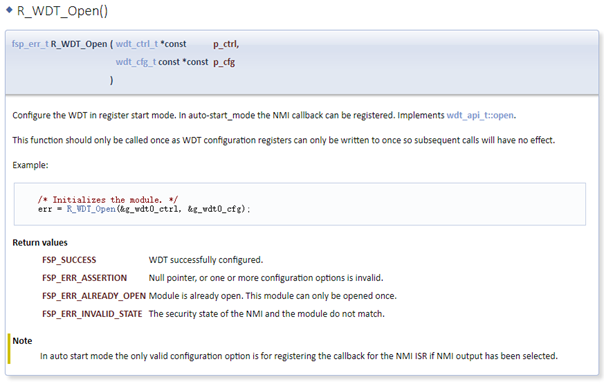
故可以用R_WDT_Open()函数进行初始化和开启WDT。
/* Open the module. */
err = R_WDT_Open(&g_wdt0_ctrl, &g_wdt0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
16.R_WDT_Refresh()函数原型
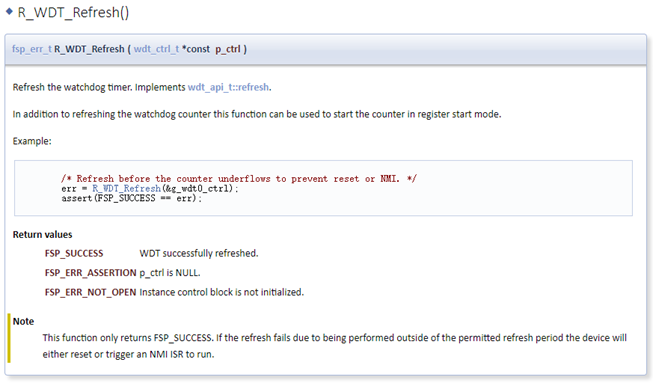
故可以用R_WDT_Refresh()函数进行喂狗操作。
/* Refresh before the counter underflows to prevent reset or NMI. */
err = R_WDT_Refresh(&g_wdt0_ctrl);
assert(FSP_SUCCESS == err);
17.R_WDT_CounterGet()函数原型
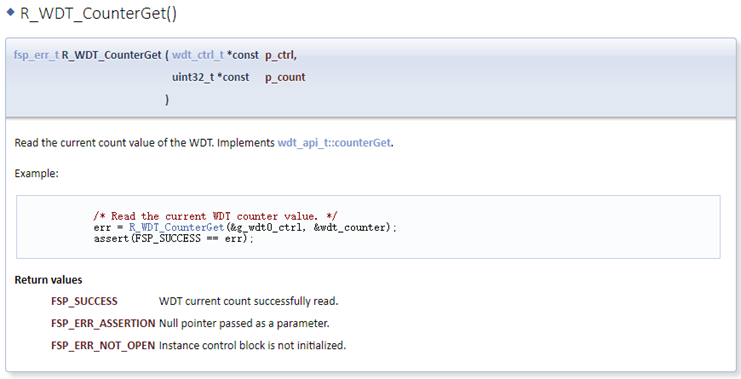
故可以用R_WDT_CounterGet()函数获取当前的计数值。
/* Read the current WDT counter value. */
err = R_WDT_CounterGet(&g_wdt0_ctrl, &wdt_counter);
assert(FSP_SUCCESS == err);
18.WDT周期设定
通过查阅数据手册,可以得知WDT使用的时钟为PCLKB。
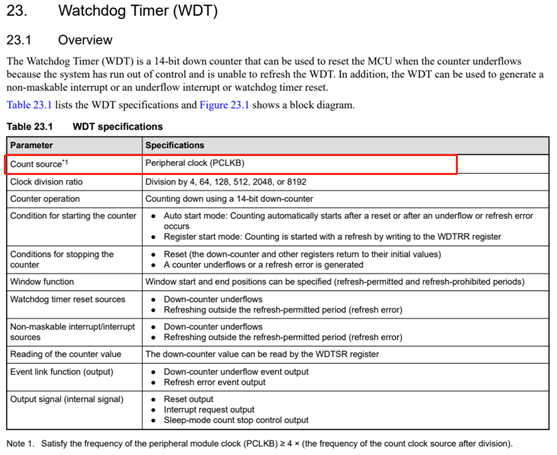
在本案例中,使用的PCLKB时钟为24MHz。
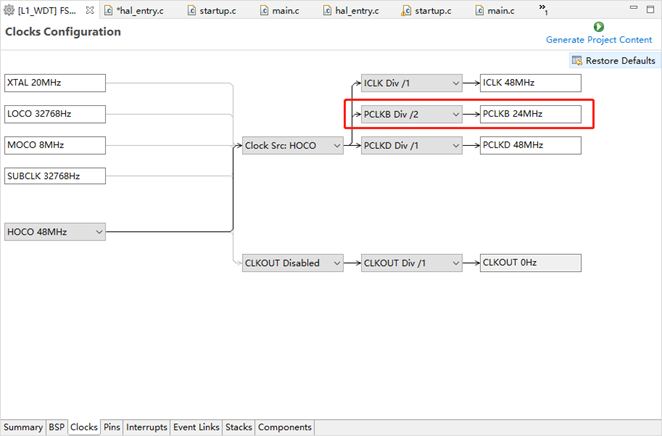
WDT从PCLKB运行,依据上文的设定,PCLKB周期如下所示。
| Paramete | Equal to |
| PLCKB/2 | 24MHz |
| Clock division ratio | PLCK/8192 |
| Timeout period | 16384 cycles |
| WDT clock frequency | 24MHz / 8192 = 2929.6875 Hz |
| Cycle time | 1 / 2929.6875 Hz = 341.33 us |
| Timeout | 341.33 us * 16384 cycles = 5.59 seconds |
上述可以看到在该设置下的溢出时间为5.59s,那么1s的计数为1s/341.33 us=2930。
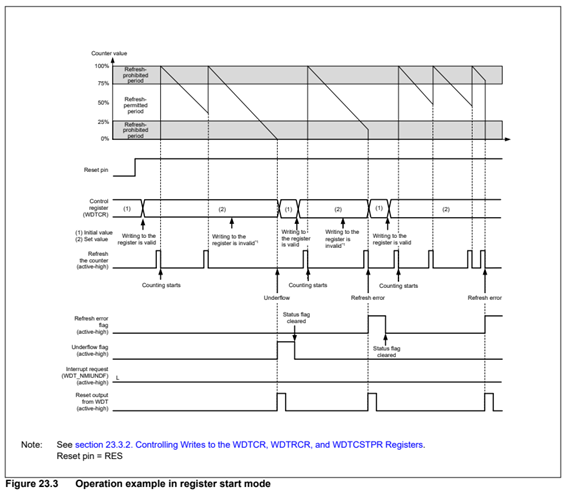
19.WDT计数周期
WDT计数是从最高一直减到0,当到0时候触发复位。
20.演示效果
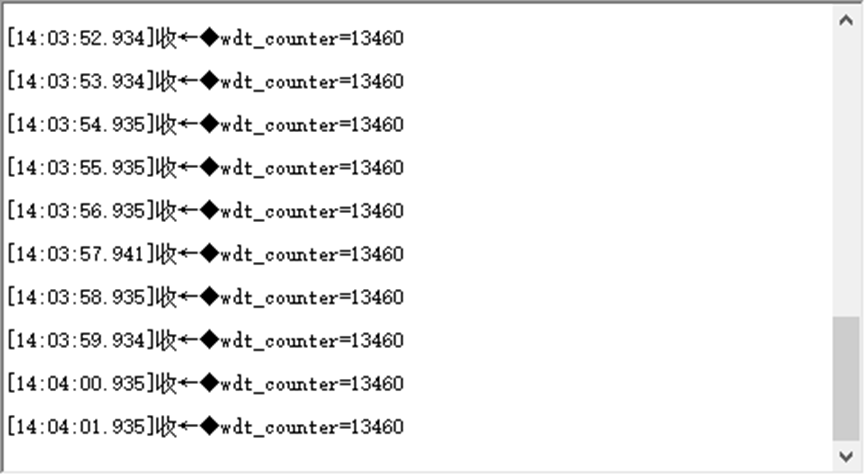
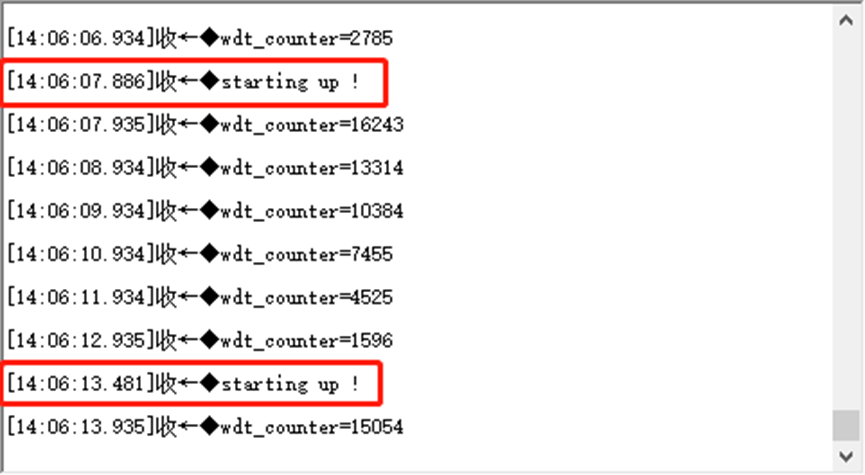
设置每过1s打印一次当前时间,分别设置喂狗和不喂狗,结果如下。
延迟1s的计数为1s/341.33us=2930,打印为13460,由于是向下计数,16384-2930=13554,符合计算值。
当不执行喂狗时候,计数值到0时会进行复位,2个复位之间为5.595s,符合计算的5.59s。
21.完整代码
#include "hal_data.h"
#include
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;ievent == RTC_EVENT_PERIODIC_IRQ)
rtc_flag=1;
}
void hal_entry(void)
{
/* TODO: add your own code here */
err = R_SCI_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);
assert(FSP_SUCCESS == err);
/* Initialize the RTC module*/
err = R_RTC_Open(&g_rtc0_ctrl, &g_rtc0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Set the periodic interrupt rate to 1 second */
R_RTC_PeriodicIrqRateSet(&g_rtc0_ctrl, RTC_PERIODIC_IRQ_SELECT_1_SECOND);
/* (Optional) Enable the WDT to count and generate NMI or reset when the
* debugger is connected. */
R_DEBUG->DBGSTOPCR_b.DBGSTOP_WDT = 0;
/* (Optional) Check if the WDTRF flag is set to know if the system is
* recovering from a WDT reset. */
if (R_SYSTEM->RSTSR1_b.WDTRF)
{
/* Clear the flag. */
R_SYSTEM->RSTSR1 = 0U;
}
/* Open the module. */
err = R_WDT_Open(&g_wdt0_ctrl, &g_wdt0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* In register start mode, start the watchdog by calling R_WDT_Refresh. */
err = R_WDT_Refresh(&g_wdt0_ctrl);
assert(FSP_SUCCESS == err);
printf("starting up !\n");
uint32_t wdt_counter = 0U;
while(1)
{
if(rtc_flag)
{
/* Read the current WDT counter value. */
err = R_WDT_CounterGet(&g_wdt0_ctrl, &wdt_counter);
assert(FSP_SUCCESS == err);
printf("wdt_counter=%d\n",wdt_counter);
rtc_flag=0;
/* Refresh before the counter underflows to prevent reset or NMI. */
err = R_WDT_Refresh(&g_wdt0_ctrl);
assert(FSP_SUCCESS == err);
}
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
};i++)>
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mcu
+关注
关注
147文章
19160浏览量
404411 -
ARM
+关注
关注
135文章
9589浏览量
393744 -
嵌入式
+关注
关注
5209文章
20679浏览量
337215 -
开发板
+关注
关注
26文章
6433浏览量
121068
发布评论请先 登录
相关推荐
热点推荐
【瑞萨FPB-RA6E2试用】Zephyr看门狗(WDT)机制
程序卡死未按时喂狗,看门狗就会直接切断并复位MCU的电源轨,让系统重启。
在传统的裸机开发中,配置看门狗需要翻阅芯片手册,操作复杂的控制寄存器和分频器。而在Zephyr中,无论底层是瑞萨
发表于 02-20 10:35
【RA-Eco-RA2E1-V1.0开发板试用】概览、环境搭建与TTL串口烧录点灯
----PWM.pptx
| 瑞萨e2studio----RTC.pptx
| 瑞萨e2studio
发表于 01-31 22:10
瑞萨RL78/F22 MCU基于e2studio开发环境创建触摸应用样例工程
瑞萨RL78/F22 MCU基于e2studio开发环境创建触摸应用样例工程

【瑞萨FPB-RA6E2试用】【瑞萨FPB-RA6E2】看门狗(Watchdog Timer, WDT)个人理解及资料整理
【瑞萨FPB-RA6E2】看门狗(Watchdog Timer, WDT)个人理解及资料整理
瑞
发表于 01-14 11:09
【瑞萨RA × Zephyr评测】多线程和看门狗
本文章旨在评估使用 Zephyr RTOS 在 Renesas FPB-RA6E2 开发板上实现多线程调度与硬件看门狗功能的应用。评估内容包括任务调度、看门狗初始化流程、主程序逻辑的详细解析,以及实验现象与数据分析。
【瑞萨FPB-RA6E2试用】【原创】【瑞萨RA × Zephyr开发板评测】WDT功能测试
;g_wdt0_ctrl);
}
看门狗中断回调函数:
void wdt_callback (wdt_callback_args_t * p_args){
(void) p_args
发表于 01-07 18:07
瑞芯微(EASY EAI)RV1126B看门狗
1.查看看门狗资源通过ls命令,即可查看系统有多少个看门狗节点ls/dev/watchdog*2.快速上手2.1开发环境准备如果您初次阅读此文档,请阅读《入门指南/开发环境准备/Easy-Eai编译

【瑞萨RA6E2】瑞萨E2S软件安装过程,等待过程玩下97_e2 studio_ZGZZ
;amp;vd_source=7ab92f6a337b22fda39554fd6e70f01a
本报告旨在记录基于瑞萨RA6E2 MCU评估板的初步开发体验。主要内容包括:
软件开发环
发表于 12-01 22:42
中科芯CKS32F107XX系列MCU的窗口看门狗介绍
中科芯CKS32F107xx系列产品内部提供两个看门狗定时器单元,独立型看门狗IWDG(Independent Watchdog)和窗口型看门狗WWDG(Window Watchdog),本文主要介绍WWDG的应用,关于IWDG

“喂狗”的艺术:看门狗不叫,才是系统好
看门狗选哪只好呢? 中间那只看起来不错。 咳咳搞错了,自动化项目中说的看门狗是PLC的看门狗,那这个狗有什么用呢?难道真的是看大门的狗?
小安派BW21-CBV-Kit入门教程之看门狗简介
这是一个简单的看门狗定时器(WDT)示例,演示了看门狗 API 的用法。 有关看门狗的定义和工作原理,请参阅以下信息。
如果在配置位中启用了看门狗(WDT)功能,是否会影响ISP升级过程呢?
如果在配置位中启用了看门狗 (WDT) 功能,则看门狗将自动启动。默认时钟源是内部低速10 kHz时钟。复位时间 = 溢出时间延迟时间
= (2 ^ 18 1026) /10k=26.
发表于 08-18 08:26
瑞萨RA单片机在e2 studio环境下printf编译出错的问题解析
最近看到有一些网友在讨论关于:瑞萨RA单片机在e2 studio环境下printf编译出错的问题。




评论