 AGV小车是如何通过AGV激光导航仪识别反光柱坐标
AGV小车是如何通过AGV激光导航仪识别反光柱坐标
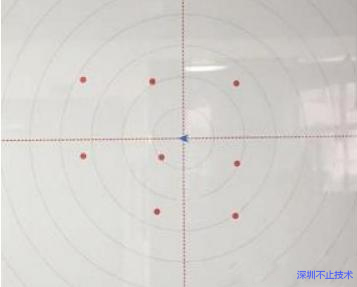
AGV小车定位原理——识别反光柱坐标
通过过滤反射系数,可以得到同一反光柱上多个激光点的详细数据(角度、距离、反射系数)。然后通过简单的数学计算和规律分析,就可以得到该反光柱相对导航仪的准确坐标。
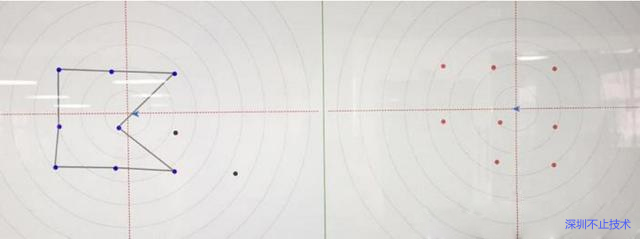
AGV叉车定位原理——定位匹配
想要获得AGV激光导航仪坐标和角度,必须同时满足以下2个条件:
①AGV叉车导航仪至少可以扫描到3个反光柱
②叉车AGV导航仪扫描到的多个反光柱构成的图形,在已有地图数据中,可以成功匹配到相同构形。利用已有地图数据,结合即时扫描的反光柱坐标,反推出AGV导航仪位姿。
深圳市不止技术有限公司是激光雷达行业头部知名企业,团队自2016年底就开始了多款激光雷达方案的研发,并创造了30多件发明专利,我们作为激光雷达行业5年多的资深老兵,对激光雷达有着深厚的技术积累。是一家能提供单点、单线到多线全系列、dtof、itof全品类激光雷达方案定制化的公司,而且掌握了机器人移动底盘技术。在激光雷达核心硬件、专用芯片、AI算法上具有完整的自主知识产权
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光雷达
+关注
关注
968文章
3972浏览量
189922 -
激光系统
+关注
关注
0文章
151浏览量
9402
发布评论请先 登录
相关推荐
这么全的AGV小车有配件 赶快收藏
是agv小车行走的关键部件,通常包含麦克纳姆轮、全向轮、万向轮等,适用于不同的导航系统和移动需求; 电机 电机是agv小车提供动力的核心零部

AGV小车的工作原理是什么?
AGV小车通过导航定位、路径规划、任务接收与执行、运动控制、安全监测、状态监测和电池管理等系统协同工作,以实现高效、准确的物流搬运。 1. 导航

如何选择让自己满意(适合)的agv小车?纯干货分享
上的零部件配送、物流中心的长距离运输等。不同的应用场景对AGV小车的类型和功能有不同的要求。 负载能力:根据搬运货物的重量选择适当负载能力的AGV小车。
AGV激光导航定位技术与构建地图
AGV是制造物流重要设备,激光导航AGV高可靠灵活,SLAM技术关键,激光SLAM成熟且落地丰富,无需人工标志物,复合式

智能呼叫、激光导航、自动避障,为什么AGV机器人被需要?
AGV机器人通过感应、导航等技术提升制造灵活性,满足定制化需求,节省人力成本。AGV小车与智能制造系统交互,实现高效生产。新兴技术如物联网、

AGV读卡器在AGV自动搬运小车上应用方案
AGV小车上的AGV读卡器通过读取地面轨道的RFID电子标签信息,做出相应的动作(如改变速度、选择轨道、定位和停车等)。在AGV

什么是AGV小车?有什么功能?适用于哪些场景?
搭载不同的负载,实现物料在不同工位、仓库、生产线之间的自动搬运。这大大减少了人工搬运的工作量,提高了工作效率。 自动导航: AGV小车通过不同的导航

AGV选型要点及步骤,保证企业选择的AGV小车更实用
AGV小车作为智能化物流仓储不可或缺的工具,在制造业得到了广泛的应用,市场需求呈现出井喷式增长。但是AGV市场还存在着很多问题,制造企业在产品选型时往往缺乏正确的引导。 毫无疑问,我们的自动化物流

AGV小车使用避障雷达
AGV(自动导引车)小车使用避障雷达是为了确保其在运行过程中的安全性和稳定性。避障雷达,如激光雷达或超声波雷达,能够实时检测并避免与障碍物发生碰撞。 AGV
AGV小车上的惯性导航模块运用——SGPM02
之前我们介绍过SGPM01系列陀螺仪模块在智能泳池清洁机器人导航的方案(SGPM01)。这款惯性导航模块收到了许多企业的欢迎。由此,爱普生推出了SGPM02系列陀螺仪模块

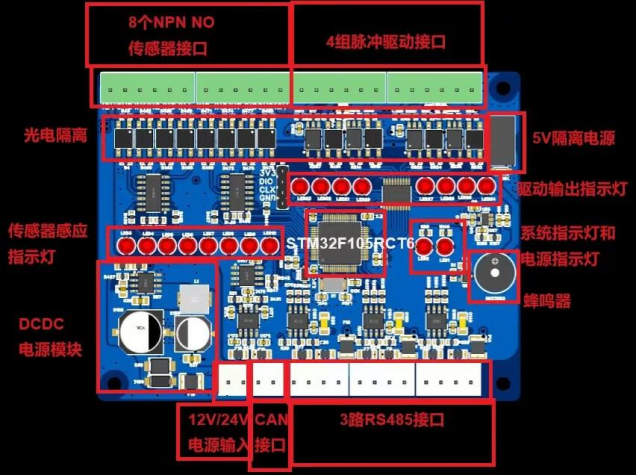
AGV小车升降平台控制板
简介: 应用于控制AGV小车升降,推拉,勾取动作 应用场景: 升降装置结构,AGV小车升降推拉装置结构 1、产品介绍: 本产品是AGV
激光,磁性,视觉?什么是AGV最好的导航系统?
劳动力成本上涨和消费者对产品质量要求的提高,推动传统制造业向高效、灵活的生产模式转型。激光AGV作为智能化物流解决方案,通过激光SLAM导航技术实现自主定位与






 工商网监
工商网监
评论