 智造之眼®机器视觉飞拍,助力企业智造!
智造之眼®机器视觉飞拍,助力企业智造!
1.什么是机器视觉飞拍
在机器视觉检测项目中,我们经常采用停拍的拍照方式,即检测样品运动到指定拍照位置时,样品停止运动,此时触发相机拍照,对样品图像进行处理后,再执行下一步动作。
虽然这种拍照模式的实现方式和运动控制比较简单,但是生产效率较低,无法满足高速度的检测项目要求。
因此,很多情况下需要采用视觉飞拍的功能,即检测样品运动到拍照位置时不停止运动,此时相机完成瞬时拍照后样品继续运行。
2.智造之眼®飞拍应用系统架构图

棱镜视觉系统:主要由相机、镜头、光源、光源控制器、视觉处理器等组成。根据检测品运动速度的快慢,视觉系统对相机响应时间、曝光时间以及镜头光圈、像素和光源等都有一定的要求。
3.视觉定拍与飞拍的对比
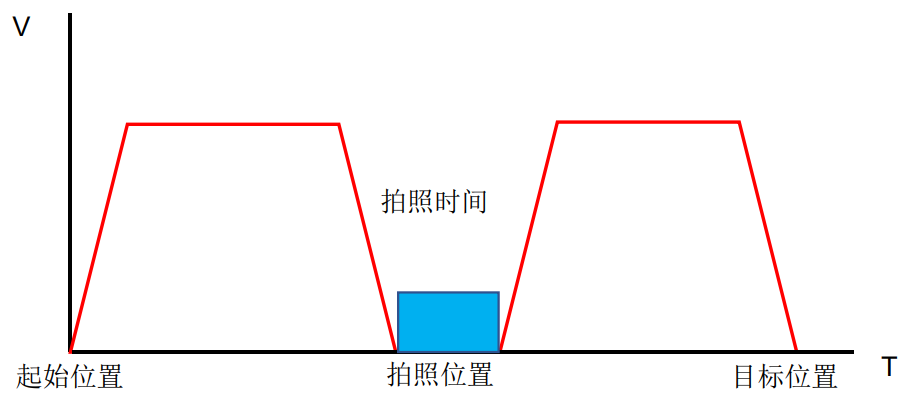
(1)视觉定拍
传统的视觉定位采取定拍的方式,即机构按既定的轨迹运动,当运行到拍照点时,运动轴速度减为0停下来进行拍照、图像采集、运算处理、纠偏,待视觉系统处理完成后,继续完成接下来的轨迹运动,V-T图如下:
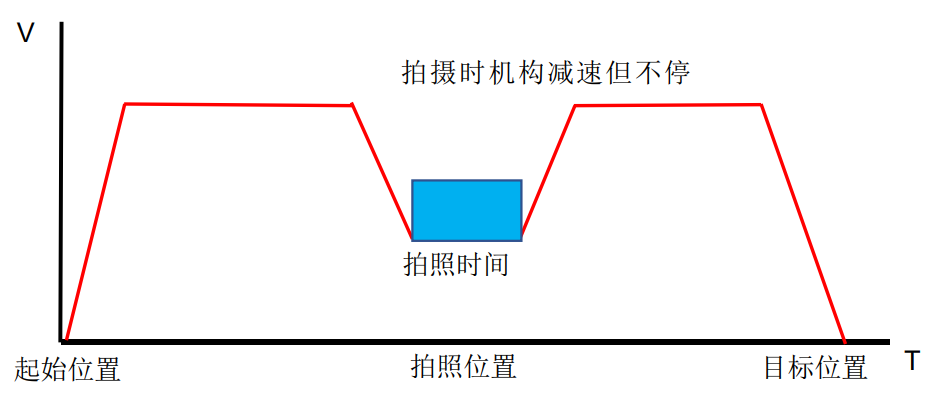
(2)视觉飞拍
针对传统的视觉定拍方式生产效率不够高的问题,在一些应用场合,越来越多地使用视觉飞拍来进行视觉定位与检测。
机构按照既定的轨迹运动,当运行到拍照点时,运动轴不停下,相机瞬间完成飞行抓拍的功能。由于整个过程中移动机构不停止,从而大量节省机构运行时间,提高效率,并且能保证运行精度。
◉在精度足以保证的情况下,可以不减速,V-T图如下:

◉在精度不足的情况下,可略微降速,分段运行,但速度不降为0,V-T图如下:
4.应用案例
(1)麦拉飞拍定位项目—方案亮点
物料无需暂停,机构连续吸取物料,相比静态吸料,提高效率,减少机台CT。
进一步提升精度,现场实测贴合定位精度,贴合定位精度可达±0.05mm。
视觉硬件环境可根据机构的速度定制。
 麦拉飞拍定位
麦拉飞拍定位(2)镀金飞拍检测项目—方案亮点
载带无需停止。
检测速度能够达到12m/s,检测精度达到±0.04mm。
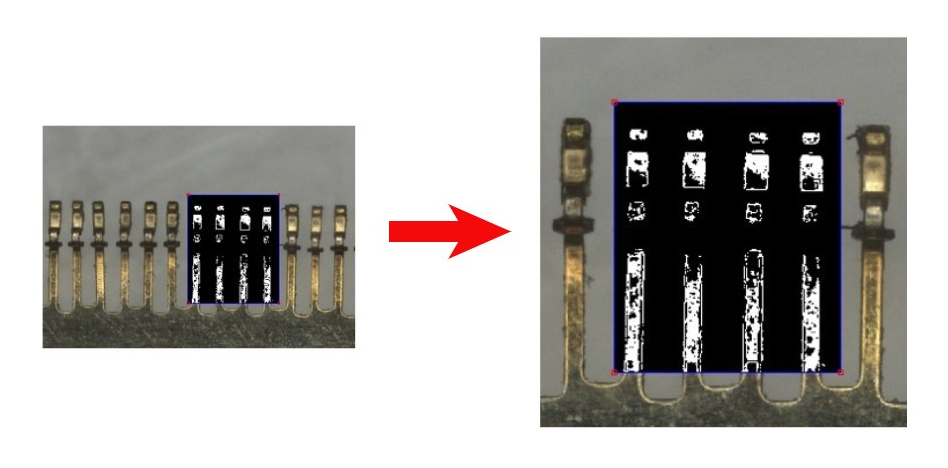 镀金飞拍检测
镀金飞拍检测智造之眼-Kenexs视觉团队深耕视觉应用多年,深知客户场景需要,综合考量最大化客户的生产效益,同时保证检测精度高、速度快双向指标
-
机器视觉
+关注
关注
162文章
4405浏览量
120683 -
人工智能
+关注
关注
1796文章
47643浏览量
240103
发布评论请先 登录
相关推荐
工业机器视觉算控融合一体化套件方案,赋能工业智造

第六届鼎捷智造节:数智服务商联手助力中国智造

奥迪威机器人发布两大精密制造设备,助力生产向智造跨越!

华南慕尼黑电子生产设备展 | 奥迪威机器人发布两大精密制造设备,助力生产向智造跨越!

驱动未来工厂,微亿智造与捷勃特全球首发具身智能工业机器人

大研智造激光锡球焊:未来制造的精准之选

奥迪威参加三大海外展会,智能感知与执行技术助力全球“智造”升级!
航顺芯片亮相CICD年会主论坛,HK32MCU助力中国智造产业升级

广和通AIoT解决方案助力AI之眼探索视界
广和通AIoT解决方案助力AI之眼探索视界

3D视觉技术:物流仓储中的“智慧之眼”
5家机器视觉相关企业2023年度业绩快报正陆续出炉





 工商网监
工商网监
评论