 让设备更高效、任务更流畅 — 科聪多智体调度管理软件
让设备更高效、任务更流畅 — 科聪多智体调度管理软件
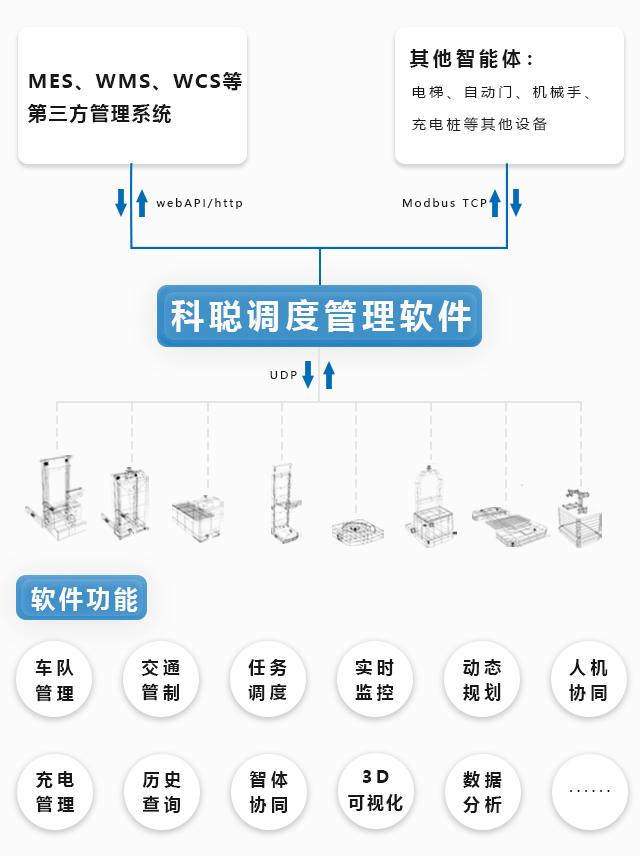
机器人调度监控软件(xRobotAGVMonitor)是专业的机器人调度管理系统,负责全部机器人的任务分配、调度及运行维护。系统采用多种调度算法,实现任务的最优分配、多机器人路径规划以及机器人交通管理,协调机器人集群协同工作,互相合作且互不影响,发挥最大效能。
自主调度算法 让设备更高效
科聪自主调度算法,结合科聪车载导航控制器,让设备的控制跟运行更加流畅和高效。通过有效的任务调度、动态路径规划,让场景内每一种设备都能物尽其用,避免设备的闲置。甚至能减少各类设备的投入,为现场降本增效。
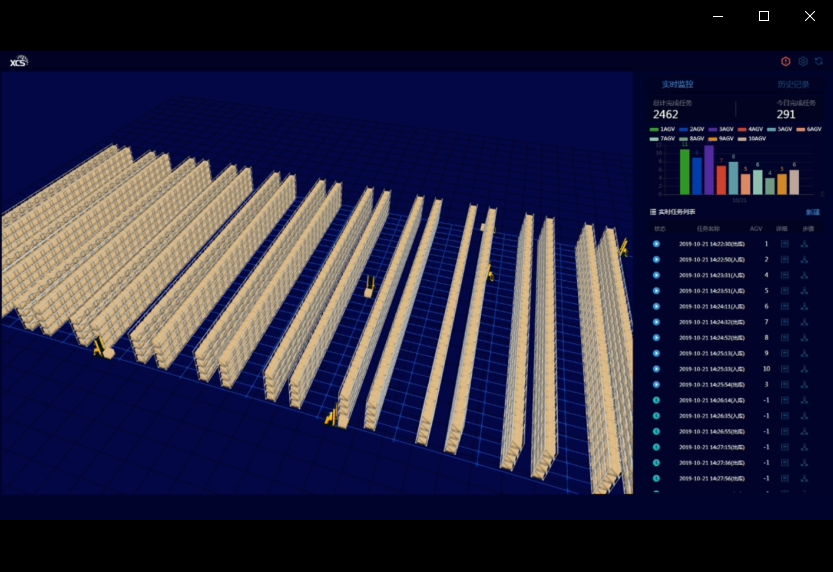
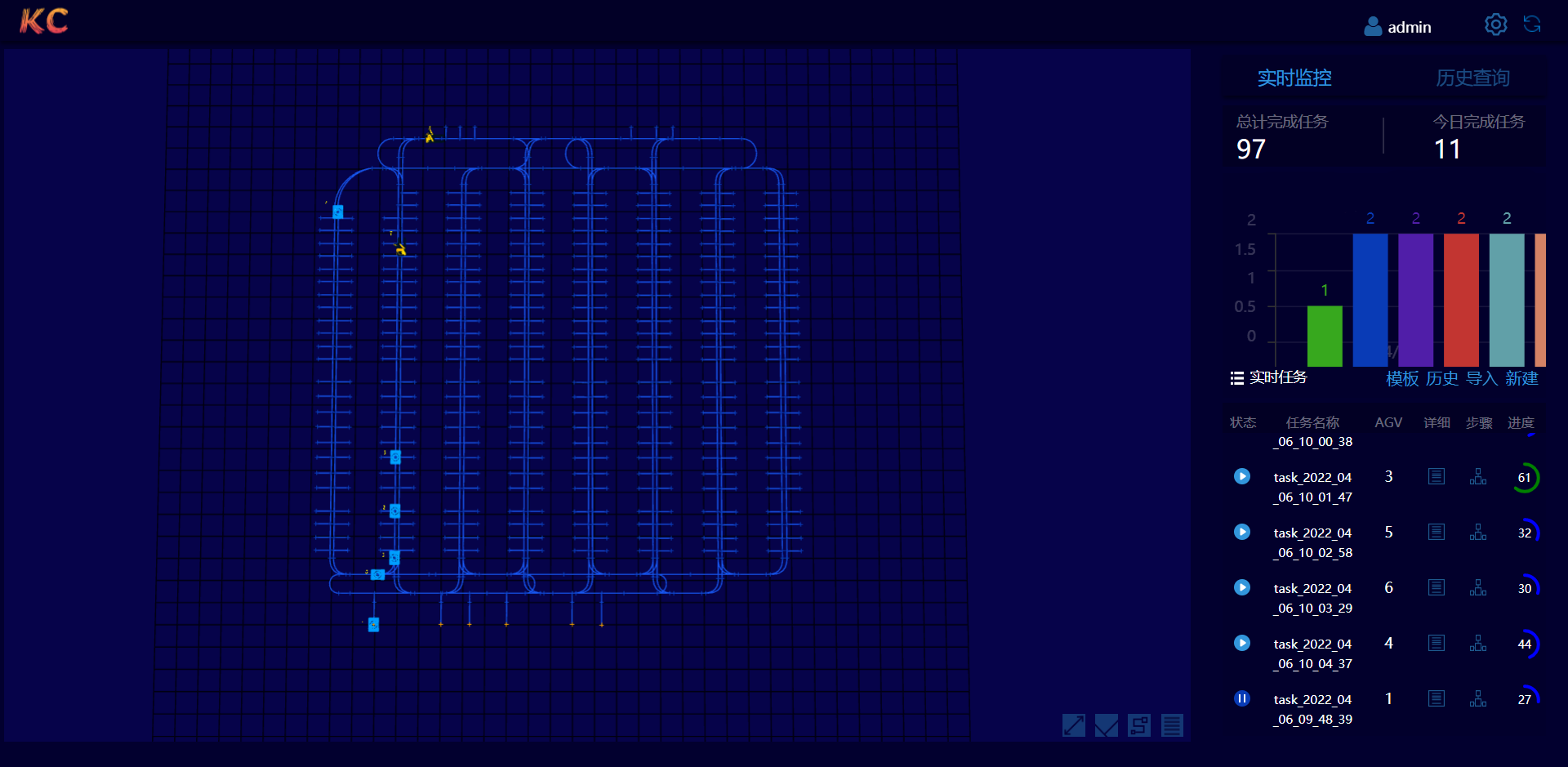
可选3D监控显示 状态信息一目了然
科聪调度软件提供现场一比一3D模型显示定制,现场运行状态、车辆状态、任务状态等信息一目了然。简洁明了的按钮功能设计,友好便捷的交互提示,让用户在图形化界面中完成对设备的配置与管理。
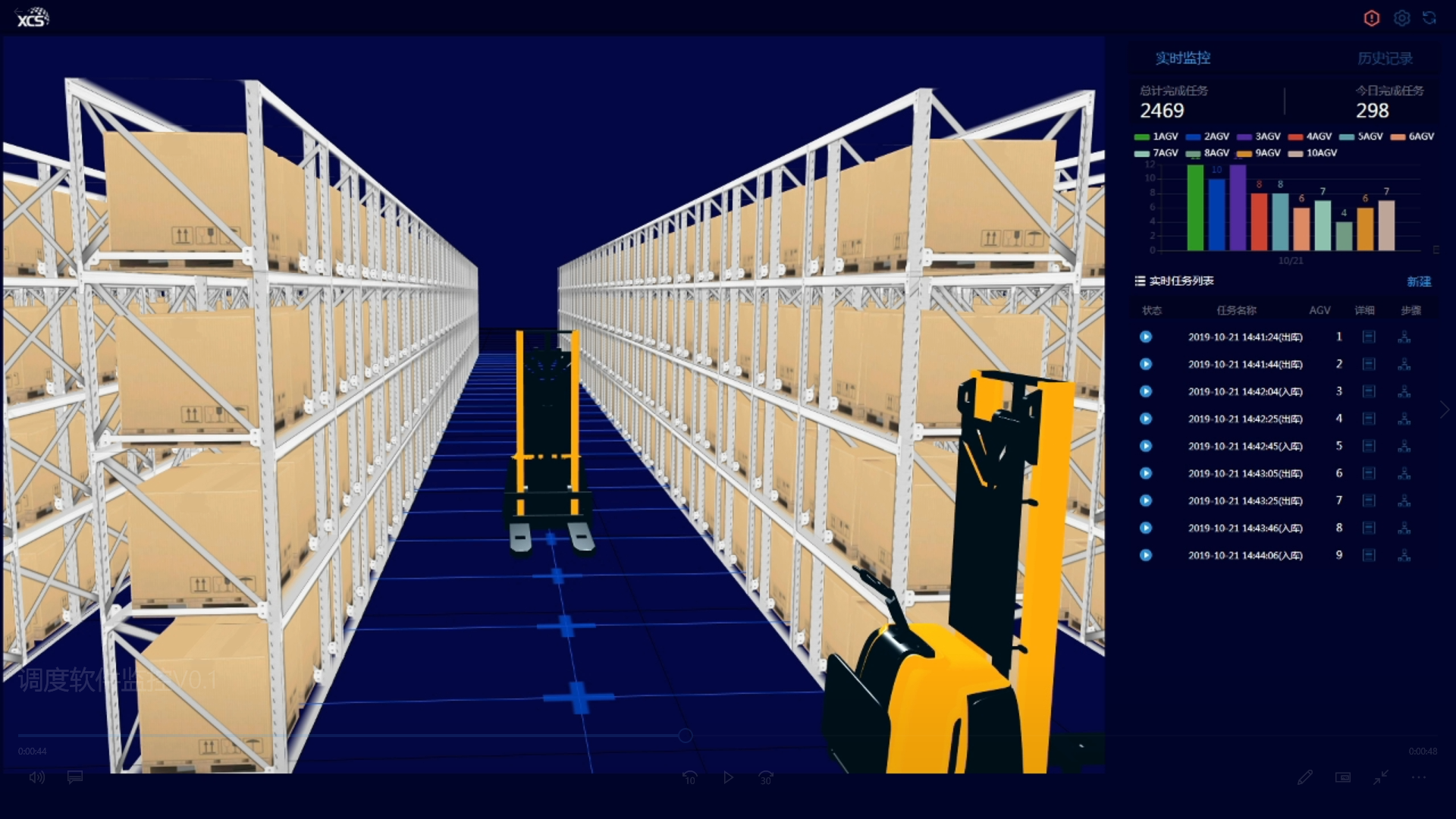
不同场景不同车型 统一调度
科聪调度软件支持基于科聪控制系统的各种车型同时调度,不论是叉式AGV、还是顶升潜伏式类KIVA小车,都能在不同场景中高效、协同、稳定的运行。最高支持4096台车辆同时调度。
应用现场中 多种智能体协同工作
科聪调度软件具有对智能机器人与智能机器人、智能机器人与自动化设备、智能机器人集群与集群间、智能机器人与人相互协同工作,从而发挥出移动机器人应用的最大效能。包括现场常见的电梯(升降设备)、自动门、机械手、充电桩等设备协同调度。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
113文章
16543浏览量
180164 -
AMR
+关注
关注
3文章
442浏览量
30446 -
移动机器人
+关注
关注
2文章
773浏览量
33717 -
AGV
+关注
关注
27文章
1363浏览量
41393
发布评论请先 登录
相关推荐
ShiMetaOS | 怎样调用ShiMeta通行管理软件打造各类通行管理终端
ShiMetaOS系统内嵌了功能全面的ShiMeta通行管理软件,该软件能够无缝对接包括闸口系统、门禁设备以及访客登记终端在内的多种出入管理设施。其强大的功能特性无需额外购买许可即可享

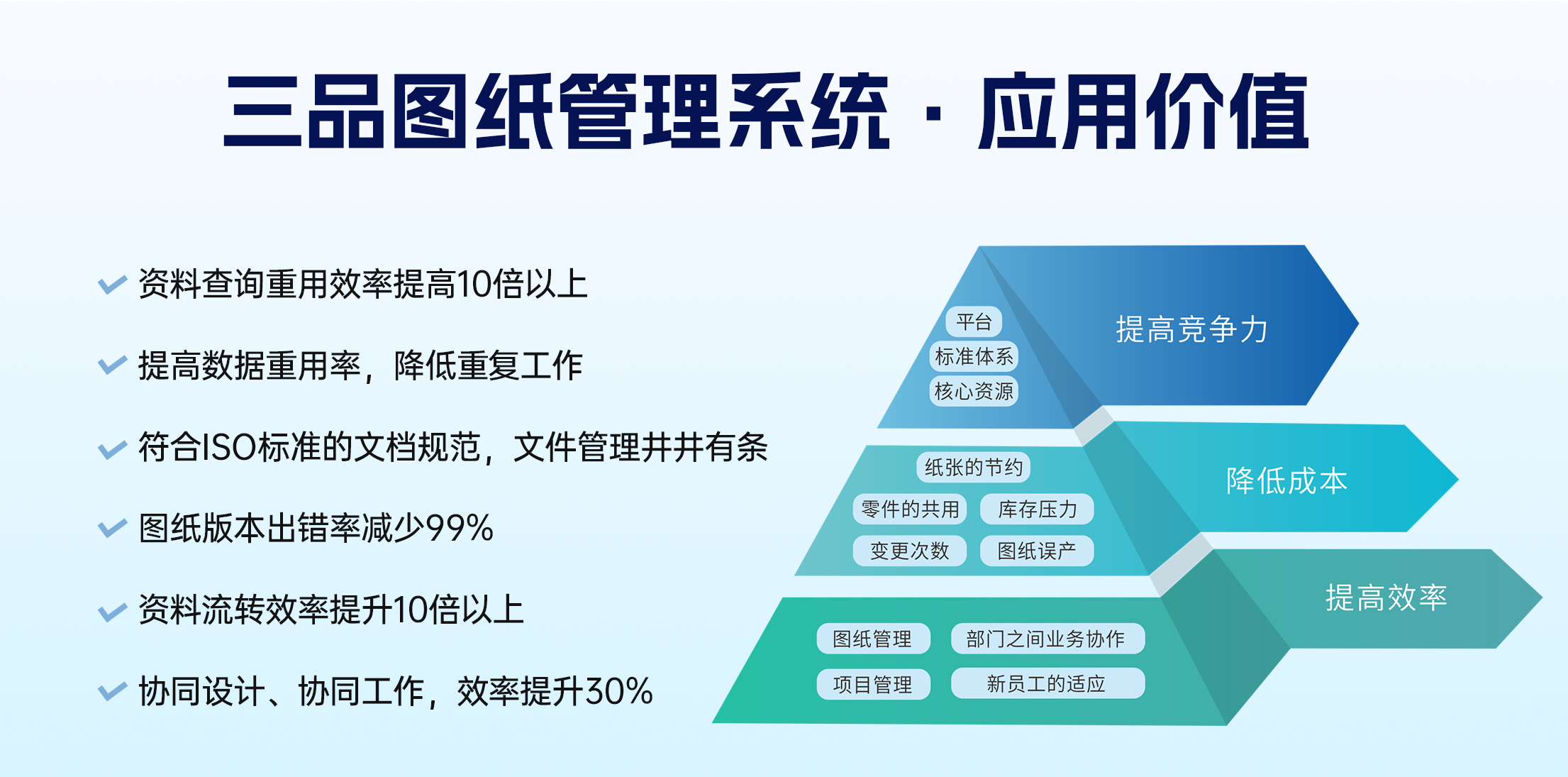
如何管理企业图纸文档:探索三品图纸文档管理软件的卓越解决方案
在快速迭代的现代工业环境中,图纸文档作为产品创新与设计的核心媒介,其管理的效率与质量直接关系到研发项目的时间线与成果质量。面对图纸信息量大、版本迭代频繁的挑战,企业迫切需要一种高效、安全且可靠的图纸管理方案。在此背景下,三品图纸
车队运营调度管理系统
车队运营调度管理系统作为无人驾驶车队的云端大脑,承担了打通业务层和无人驾驶车队的重任。经纬恒润车队运营调度管理系统包含业务对接、车辆调度、作
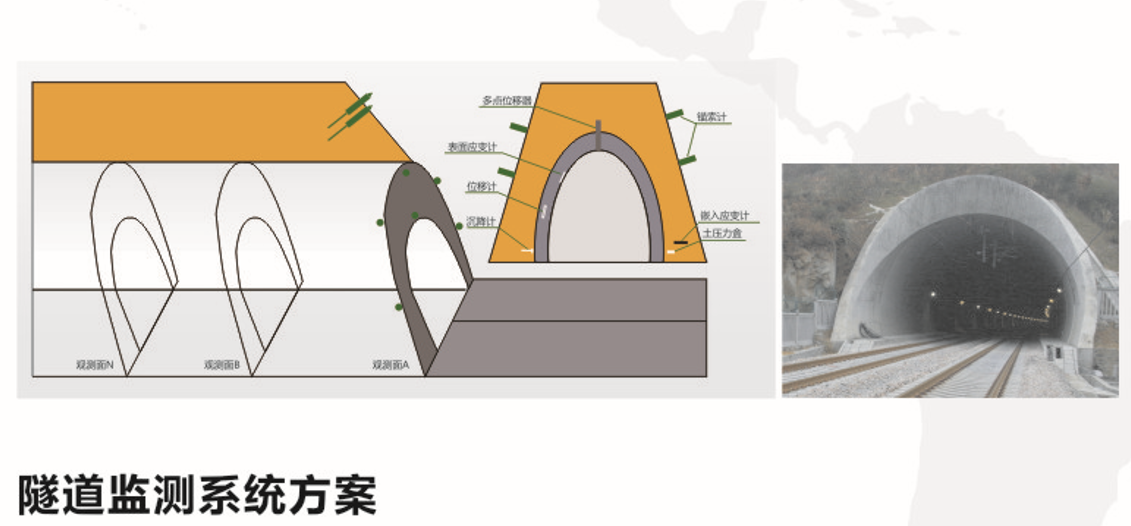
一体化监测,让隧道管理更科学 隧道监测与预警系统
一体化监测,让隧道管理更科学 隧道监测与预警系统 隧道的环境非常特殊,因此对隧道的安全性和稳定性进行监测至关重要。河北稳控科技充分运用其在自动化监测方面的技术积累,建立了一套科学完善的
LIMS实验室管理软件的优势及发展趋势
一、LIMS实验室管理软件的优势 1.提高管理效率。LIMS实验室管理软件将传统的人工管理模式转变为数字化管理模式,实现了
LIMS实验室管理软件在汽车零部件行业的应用
LIMS实验室管理软件在汽车零部件行业的应用不仅提高了生产效率和产品质量,还促进了企业的可持续发展和合规性管理。随着技术的不断进步和汽车行业对质量管理的日益重视,LIMS实验室管理软件
电源管理芯片PMIC精准控制让设备更智能、更高效
电源管理芯片是在电子设备系统中担负起对电能的变换、分配、检测及其他电能管理的职责的芯片。主要负责识别CPU供电幅值,产生相应的短矩波,推动后级电路进行功率输出。

什么是抄表管理软件?
1.什么叫抄表管理软件抄表管理软件是一种致力于公用事业公司和物业公司定制的数字化工具,主要运用于自动化技术和改进抄表全过程。它融合了数据采集、解决、分析与汇报等服务,大大提高了工作效率,降低

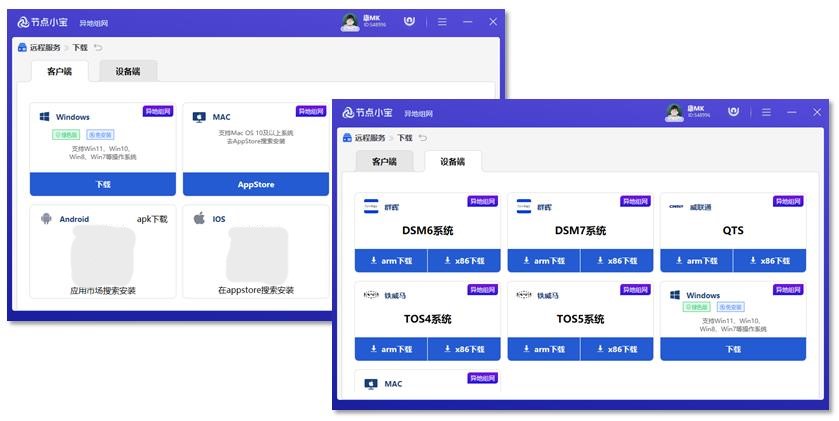
这或许是我用过最快的远程管理软件
在这个快节奏的时代,每一分每一秒的效率都至关重要。当远程工作成为常态,一款快速、稳定且高效的远程管理软件便成了我们数字生活的得力助手。今天,让我们一同走进“节点小宝”,这款被誉为“或许是最快”的远程管理软件,感受它如何重新定义了
企业使用内网安全管理软件的好处
随着信息化时代的到来,企业数据安全问题也开始受到重视。其中,防止数据泄露一直是企业安全管理中重要的一环。企业使用内网安全管理软件可以帮助实现以下几点: 确保内部网络安全:内网安全管理软件可以帮助企业
好消息!彩虹EDM图纸管理软件正式入驻华为云云商店
彩虹EDM图纸管理软件成功入驻华为云云商店,成为重要合作伙伴。软件集图纸存储、管理、共享、协作等功能于一体,通过高效检索、版本控制等满足企业
智慧园区:构建安全调度和预警管理系统
随着科技的快速发展,智慧园区逐渐成为现代城市发展的热门话题。智慧园区以其先进的技术和创新的管理模式,为企业和居民提供更高效、便捷的服务。在智慧园区中,安全调度和预警管理是一项至关重要的

讯维融合通信系统:让沟通更智能、更便捷、更高效
融合通信系统,作为现代通信技术的杰出代表,正以其独特的优势助力企业、组织乃至个人实现更智能、更便捷、更高效的沟通。讯维融合通信系统,作为其中的佼佼者,以其卓越的性能和广泛的应用领域,为用户带来
电源管理芯片核心技术让设备更智能、更高效
本文将深入探讨电源管理芯片的作用、工作原理、技术特点、应用场景以及未来发展方向,揭示其在现代电子设备中的核心地位。





 工商网监
工商网监
评论