 技术分享 | 使用TSMaster从零打造车辆控制器HIL实时仿真系列2-ECU嵌入式代码生成与TSMaster小程序集成
技术分享 | 使用TSMaster从零打造车辆控制器HIL实时仿真系列2-ECU嵌入式代码生成与TSMaster小程序集成
HIL实时仿真系列2

今天我们继续分享使用TSMaster从零打造车辆控制器HIL实时仿真系列第二章节。接下来我们亲手设计实时仿真也就是HIL的环节,为了让示例通俗易懂,我们选取了CARSIM自带的ABS控制器作为仿真的对象。
Simulink模型
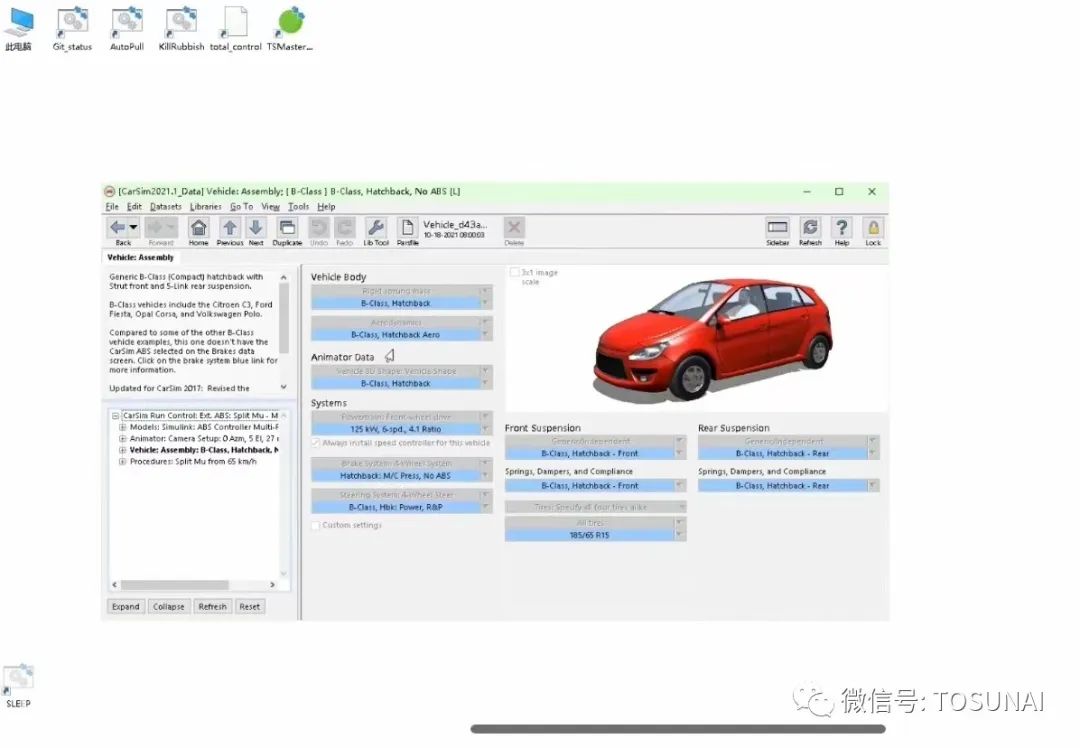
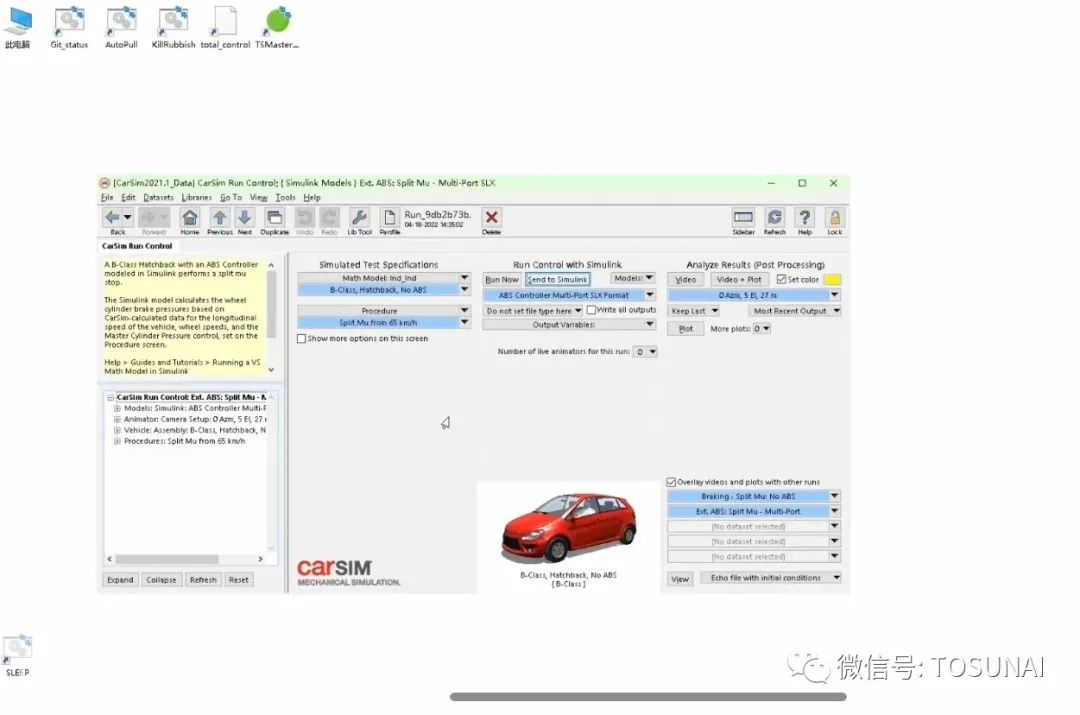
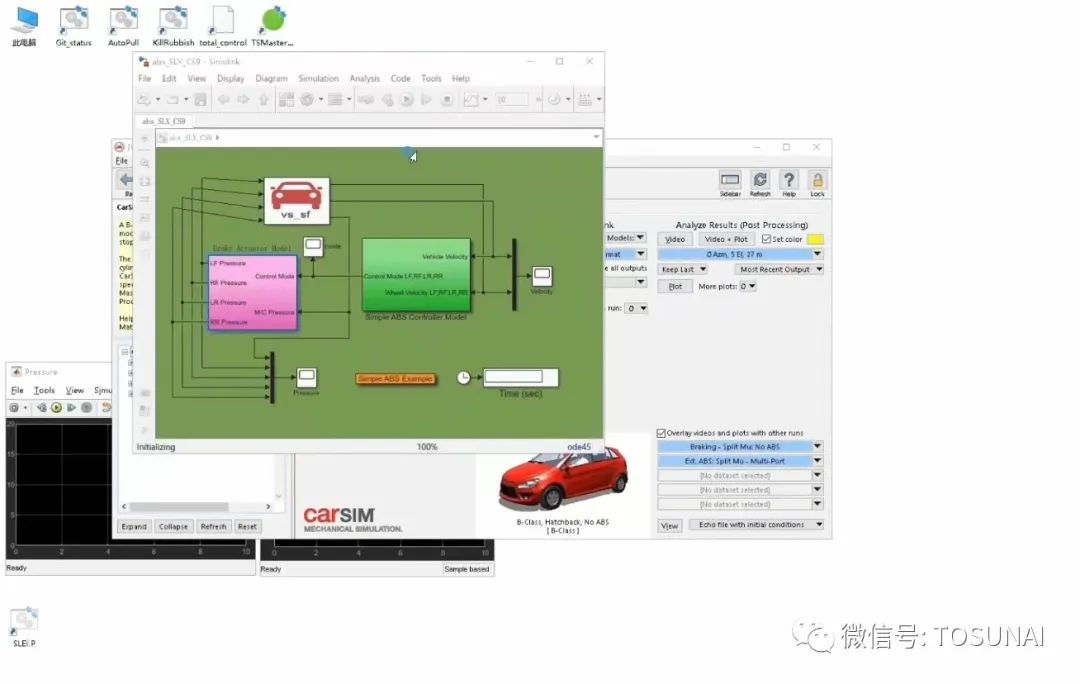
1、我们打开CARSIM,然后选择Simulink模型,对开路面Multi-port SLX,这个示例使用的是一辆不带ABS系统的小轿车,它是前驱的配置。
2、我们来看procedure,也就是驾驶员控制的部分,初始的速度是65公里每小时,自动压力是15兆帕,在0.3秒内完成也就是我们常说的150bar,档位控制是在合理的范围内自动切换,而转向部分则交给驾驶员模型进行闭环控制。
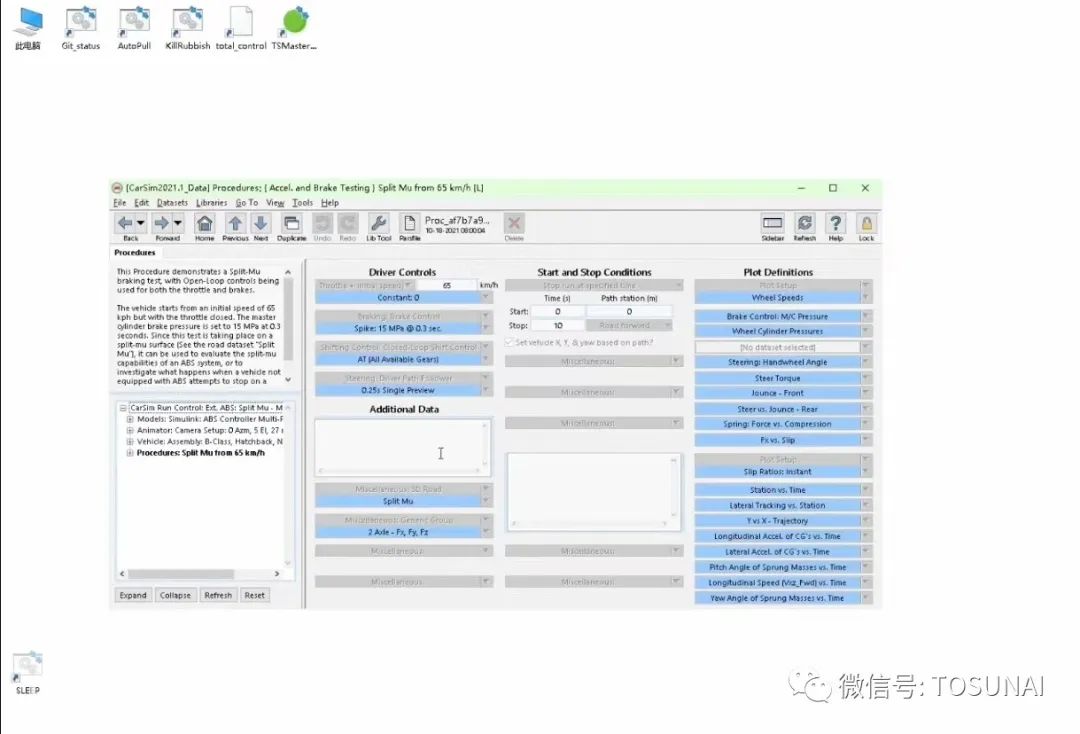
3、路面部分为对开路面,从3米开始,一侧的系数是0.2,另外一侧是0.5,回到主页,点击Send to Simulink,等待Simulink启动完毕,Simulink模型则是今天的重点。
ABS控制算法
1、我们可以将这个控制算法生成嵌入式代码,下载到带ABS功能的ECU中运行,可以看到这个算法模型包含了一个CARSIM的S function作为车辆模型的接口,还有一个简化版本的基于漂移率的轮缸压力控制策略以及后轴低选策略,还有制动性模型中的制动力分配等等。
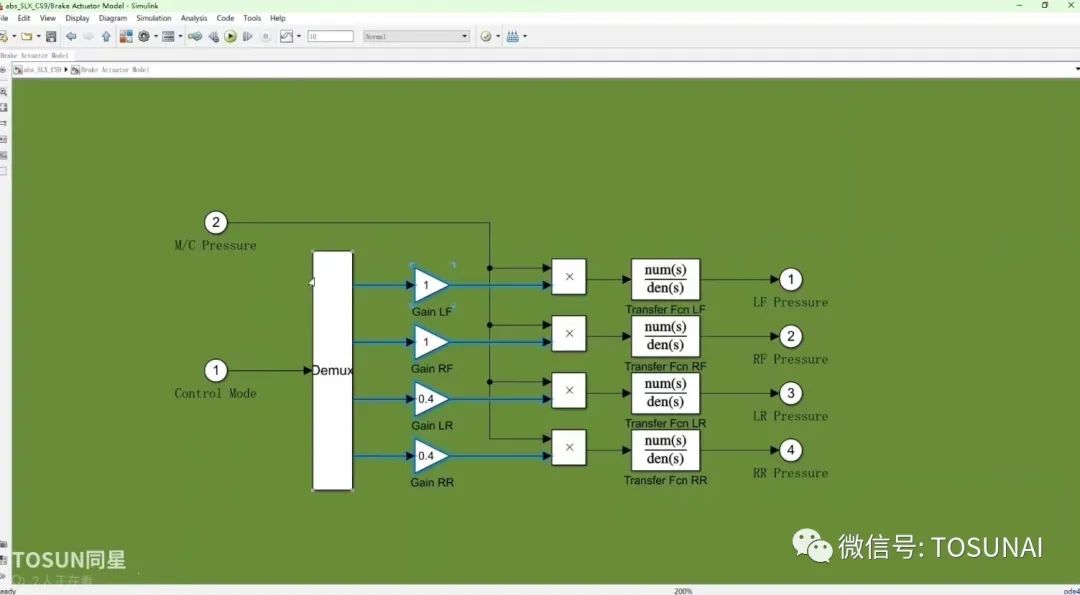
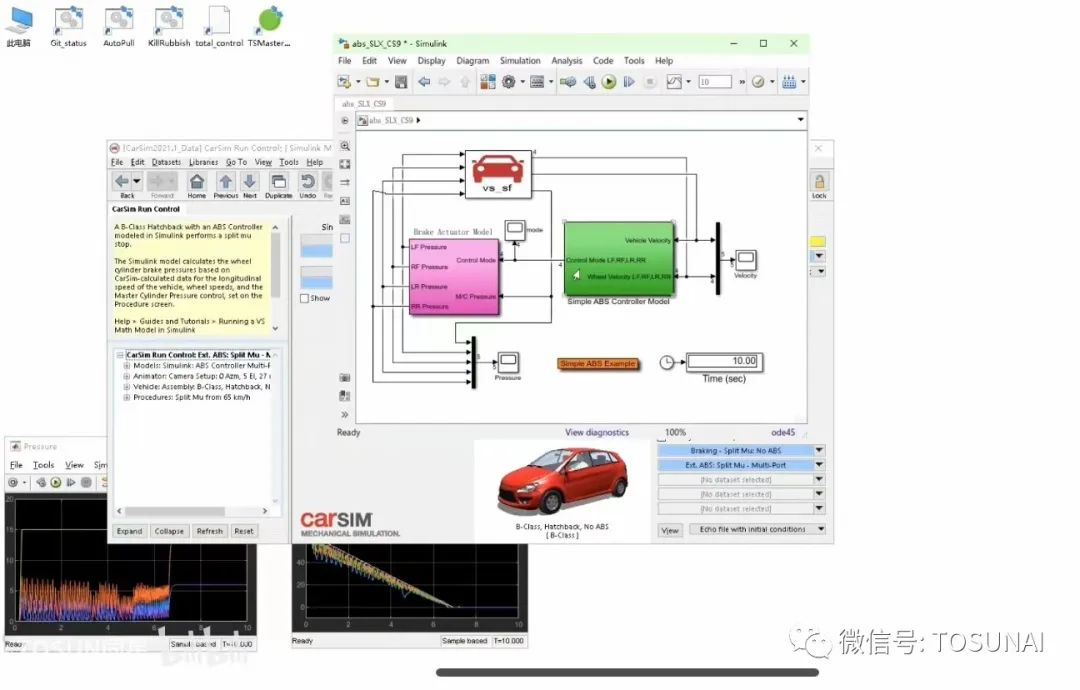
2、我们运行下这个模型,可以看到,这个轮速与车速的图形窗口中绘制了在对开路面上的ABS自动循环,而这个轮缸压力窗口中,则是四个车轮的轮缸压力控制曲线,这是一个简易版本的控制算法。制动力分配,也就是前轴压力比上后轴压力是1比0.4,很容易判断出,制动结束后,压力上升到15兆帕的两个车轮为前轮压力,而压力上升到6兆帕的是后轮压力。
RT的低成本替代方案
大家可能注意到在Simulink环境中,运行的时间是10秒,然而点击运行后实际上只用了很短的时间就跑完了整个仿真,说明此仿真的过程并不是实时的。Simulink所起的作用仅仅是按照每个step来执行算法,收集每个step产出的数据并将其绘制在图形窗口里而已。
如果我们想在ABS制动过程中像整车总线上面实时发送ABS激活的flag或者是轮缸压力值,这些都是无法做到的。而在拥有的CarSim RT版本的环境中,该模型可以被编译为dll,下载到实时系统中运行,从而实现模型算法与真实世界的交互,这个解决方案是目前被广泛采纳的仿真模式。各大主机厂和零部件厂所依赖的HIL仿真也是基于此方案展开。然而此方案存在两个问题:一是成本高,不但需要车辆动力学软件本身的license,还需要RT的license;二是部署的过程很浪费时间,在CarSim中修改参数之后需要重新部署,自动和程度不高。
而在本例中,我们通过TSMaster来模拟ABS算法,让ABS算法在TSMaster的实时环境中运行,运行过程中可以通过CAN接口或者是连接在个人电脑上的IO接口等等,与外部的世界进行交互,再通过自研的实时引擎接管CarSim的仿真过程实现车辆模型在电脑上的实时运行,如此我们便得到了RT的低成本替代方案——软件HIL。
ECU嵌入式代码&小程序
下面我们从零一步步基于TSMaster来搭建ABS算法的实时仿真环境。第一步是要通过Simulink将ABS的算法自动生成嵌入式代码,将它作为一个小程序运行在TSMaster的实时环境中。
1、我们首先将这个模型另存,然后需要修改路径,让代码的生成放置在这个新的路径中。
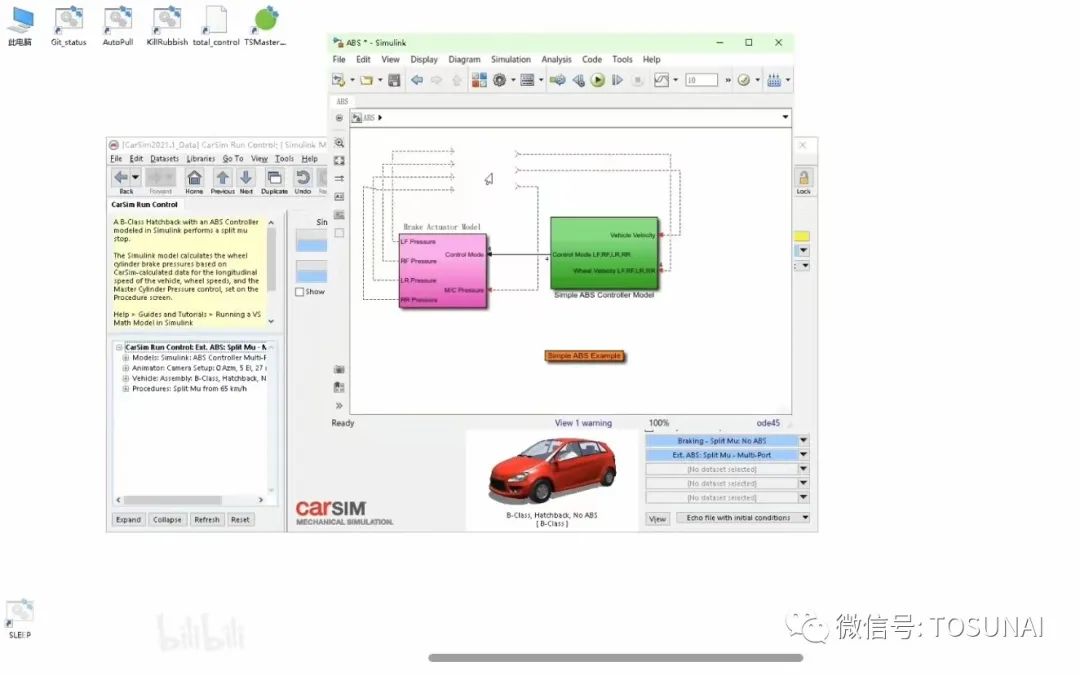
2、随后我们需要在模型上做一些修改让其可以生成嵌入式代码。首先就需要删除示波器等等一系列无用的控件,再删除CarSim的s function,将s function的接口转化为in 和 out。
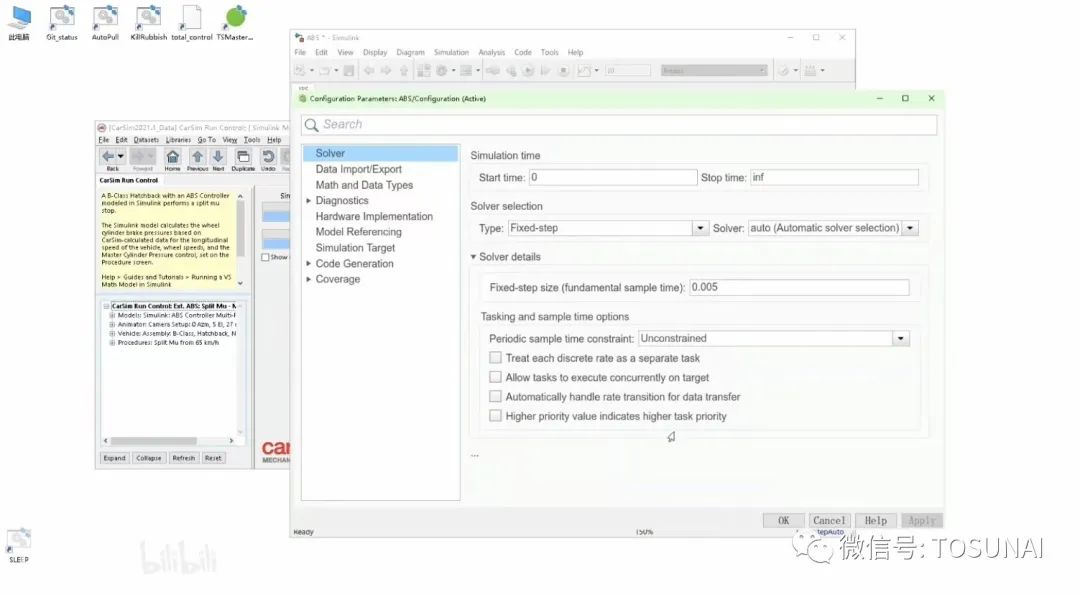
3、为了正确的生成嵌入式代码,还需要在代码生成上做一番修改,打开配置,首先是stop time,设置为inf,然后是salvar,再次使用的是定步长,step我们使用了业界通用的5毫秒。
4、接下来来到代码生成的环节,Target file自然是ert,我们还需要转到interface,在这里将continuous time勾上,因为轮缸压力模型中间用到的是传递函数,是连续状态,随后按Ctrl+B生成代码,很快代码就生成完毕了。
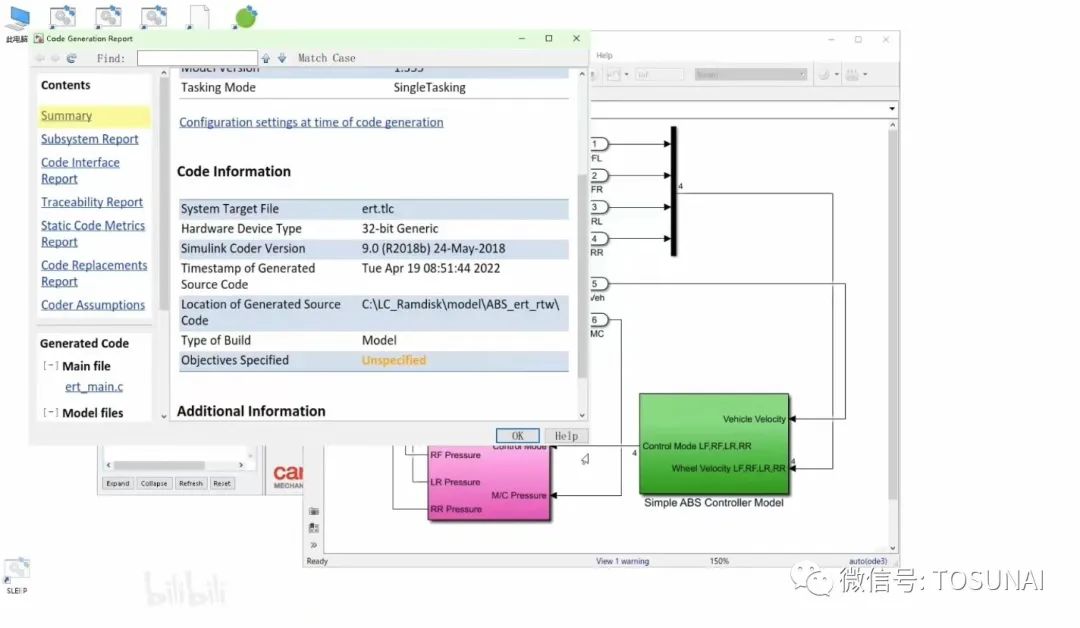
5、那么在这份代码中,我们需要将ABS.c.h以及一些列的其他的头文件复制粘贴到TSMaster的小程序的文件夹中间参与编译过程。(具体操作步骤详情可直接观看我们的B站视频哦~)
-
控制器
+关注
关注
112文章
16376浏览量
178199
发布评论请先 登录
相关推荐
嵌入式工程师常用的开发工具有哪些?
解决方案 | 基于TSMaster的平板电脑解决方案

基于TSMaster的MIL/HIL仿真开发(空簧和连续阻尼控制篇)
ecu电子控制器复位什么意思
干货分享 | TSMaster软件指南
新书推荐 | TSMaster开发从入门到精通
TSMaster—RP1210模块使用指南
TSMaster 测试报告生成器操作指南
新用户必看!TSMaster软件Q A指南(第2期)
TSMaster 的 CAN UDS 诊断操作指南(下)
TSMaster 的 CAN UDS 诊断操作指南(上)
详解TSMaster CAN 与 CANFD 的 CRC E2E 校验方法
TSMaster VLAN配置方法
TSMaster 2024.04 最新版已上线,来看看新增了哪些实用功能





 工商网监
工商网监
评论