 在自动驾驶中,如何进行汽车毫米波雷达测试?(二)
在自动驾驶中,如何进行汽车毫米波雷达测试?(二)

毫米波雷达,就是指利用波长1-10mm、频率30GHz-300GHz的毫米波,通过测量回波的时间差算出距离。毫米波雷达最开始是用于军事领域,而随着技术的不断提升,现在也开始逐渐应用于汽车领域。
工作原理
毫米波雷达(也就是ADAS智能系统)主要分为三个模块:环境感知,计算分析,控制执行。首先由天线向外发射毫米波,发射出去的毫米波遇到障碍物时会被反射回来,接收天线开始接收目标反射回来的信号;经后方处理后,将回波内包含的速度、距离等信息转换为可读取信息,从而获取汽车车身周围的物理环境信息。
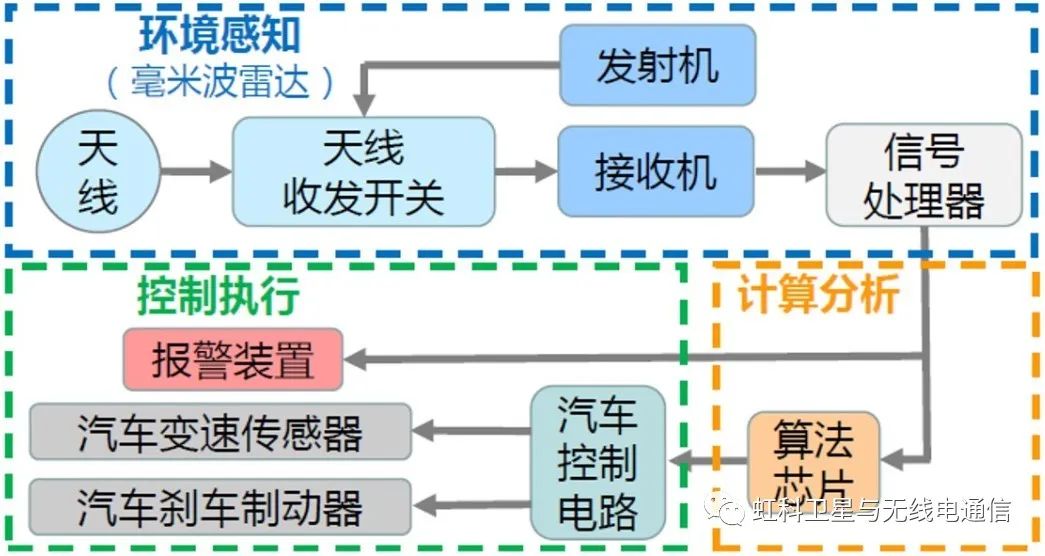
根据所探知的物体信息进行目标追踪和识别分类,结合车身动态信息进行数据融合,经由中央处理单元(ECU)进行智能处理、合理决策后,告知驾驶员或及时对汽车做出主动干预。
工作机制
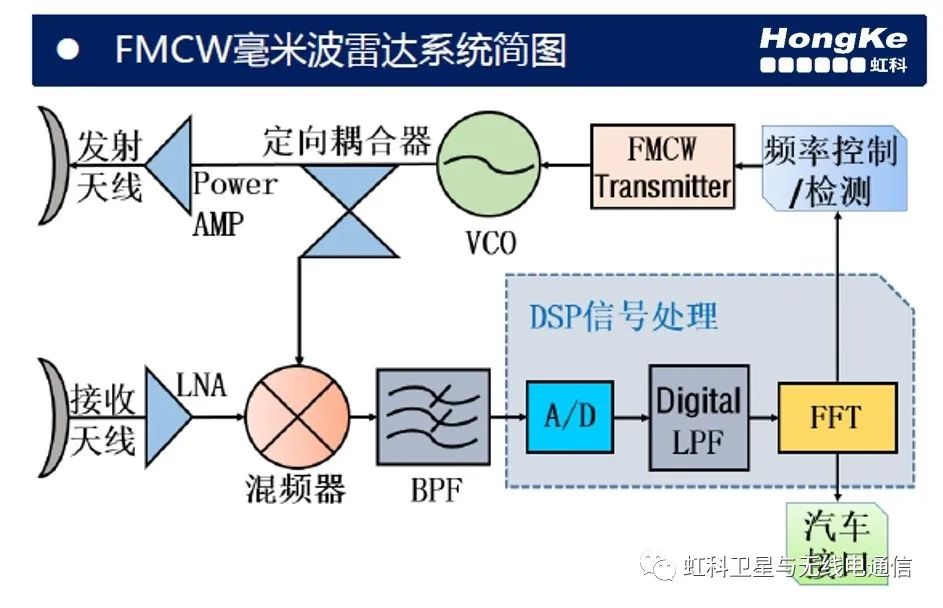
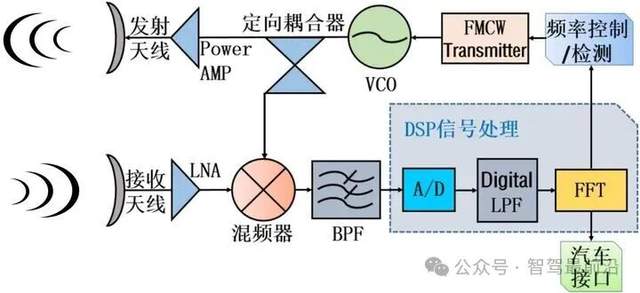
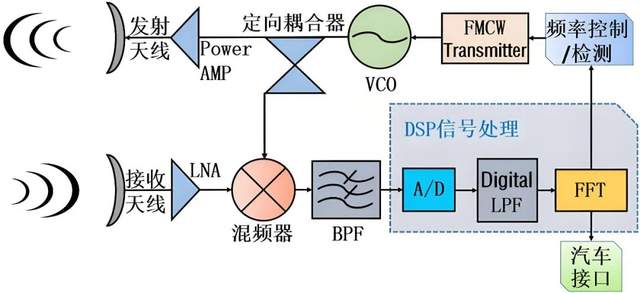
一般而言,发送的信号类型有两种,一种是脉冲信号(即非连续信号),另外一种就是连续信号。而在车载毫米波雷达中,因为其既需要能探测多个目标,还要能够从回波信号中读取到速度与距离等信息,因此工作机制为线性调频连续波机制(LFMCW mode)。除此之外,由于毫米波需要探测多个目标,因此其需要使用三角波,而不是锯齿波,图中是结合车载毫米波工作框图给出FMCW波的整个系统简图:
未来趋势
目前来看,未来各探测传感器融合是必然的趋势,这能够取长补短,并大大地节约成本,从芯片角度讲,基于多芯片级联的79GHz MiMo是产业发展方向。然而,毫米波雷达目前也是存在其自身缺陷的,相对于激光雷达而言,其成像的精细度上来看是不如激光雷达的,因此在小物体识别上是存在安全隐患的,而激光雷达目前依旧是ADAS系统中要用到的,从未来来看,视觉+相控阵(成像)毫米波雷达感知融合将成为一个重要的发展方向。
测试方案
虹科手持式频谱分析仪Spectrum Compact能够帮助进行76GHz车辆无线电设备射频测试,可以应用于汽车毫米波雷达测试。在之前的文章中介绍了这款频谱仪,今天我们重点介绍如何通过虹科手持式频谱分析仪Spectrum Compact来进行汽车毫米波雷达测试。
频率范围
- 发射机调整为最高的功率等级发射;
- 采用虹科手持式频谱分析仪观测信号,记录信号包络的起始点与截止点。
占用带宽
- 发射机调整为最高的功率等级发射;
- 设置频谱分析仪中心频率为被测信道的中心频率,在车载毫米波雷达测试中选择24GHz与77GHz。扫频宽度为2倍标称信道带宽,探测器选择AVG模式(此时检波器模式为RMS),追踪方式最大值保持;
- 记录频谱仪上显示的占信号99%功率的带宽,或使用虹科手持式频谱分析仪的POWER IN BAND功能,直接观察99%功率所占带宽。
带外发射
- 发射机调整为最大发射模式;
- 设置频谱仪起始频率为73.5GHz, 截止频率为76GHz,探测器选择AVG模式(此时检波器模式为RMS),追踪方式最大值保持;
- 记录带外发射的最大值,其数值不得超过之前限值要求;
- 设置频谱仪起始频率为77GHz, 截止频率为79.5GHz,追探测器选择AVG模式(此时检波器模式为RMS),追踪方式最大值保持;
- 记录带外发射的最大值,其数值不得超过之前限值要求。
发射机杂散
- 对被测设备进行配置,以便使其工作在最大的占空比和最大输出功率等级的状态下;
- 对于77GHz的杂散,设定在70-87GHz进行FULL SPAN寻找,追踪方式最大值保持;
- 记录在扫描中发现的处于限值以下6dB范围的任何发射。
接收机杂散
- 对被测设备进行配置,以便使其工作在持续接收或没有发射的状态下;
- 对于77GHz的杂散,设定在70-87GHz进行FULL SPAN寻找,追踪方式最大值保持;
- 记录在扫描中发现的处于限值以下6dB范围的任何发射。
-
射频
+关注
关注
106文章
6172浏览量
173998 -
通信
+关注
关注
18文章
6482浏览量
140339 -
无线通信
+关注
关注
58文章
5194浏览量
147116 -
无人驾驶
+关注
关注
100文章
4315浏览量
127248 -
自动驾驶
+关注
关注
795文章
15047浏览量
181945
发布评论请先 登录
4D毫米波雷达成为L3级自动驾驶的感知基石
自动驾驶毫米波雷达真的识别不到行人吗?


如何克服毫米波雷达点云稀疏问题?


自动驾驶中4D毫米波雷达在雨雾中更具优势吗?

看不见的引擎:毫米波雷达线圈如何驱动自动驾驶
自动驾驶中超声波雷达、激光雷达、毫米波雷达有何区别?

如何确保自动驾驶汽车感知的准确性?

2025毫米波雷达技术白皮书:智能汽车与物联网的感知核心
泰克示波器TBS1102C在毫米波雷达研发中的关键测试方案

毫米波雷达在自动驾驶中有何关键作用?
自动驾驶毫米波雷达之间会相互干扰吗?




评论