 镭神激光雷达助力东风悦享无人车Sharing-Bus完成极寒测试
镭神激光雷达助力东风悦享无人车Sharing-Bus完成极寒测试
东风悦享无人车Sharing-Bus完成极寒测试
测试地点:黑龙江·黑河
地理坐标:北纬47°42′-51°03′
东经124°45′-129°18′
最低气温:-30℃
日前,搭载镭神智能激光雷达的东风悦享无人驾驶巴士Sharing-Bus,公布完成极寒测试的消息。
这象征着东风悦享无人驾驶车步入崭新阶段,同样也是镭神激光雷达在极寒天气下性能表现的最佳佐证。


向左滑动查看镭神激光雷达
作为自动驾驶的“眼睛”,激光雷达起着关键的感知探测作用,承担着为智驾反应提供精确数据的重要责任,也是自动驾驶顺利运行的前提之一。随着应用空间和时间的变化,极端天气在所难免,激光雷达也势必会面临环境考验。
想要让无人车在极寒气候下也能精准感知、顺利行驶,需从激光雷达稳定三维地图构建与可靠道路标志识别等方面进行考虑。这便考验着激光雷达的”环境适应性“。
海拉尔开展极寒天气测试
继在漠河(-35℃~-25℃)顺利完成多款激光雷达的极寒测试后,镭神智能汽车事业部可靠性与测试中心团队转向内蒙古海拉尔区(-40℃~-25℃),挑战更寒冷的天气测试。
以符合车规级标准的128线混合固态激光雷达CH128X1为例,测试团队开展了十三个项目测试。
包括:性能测试、盲区测试、最远距离测试、水平视场角与分辨率、垂直视场角与分辨率、黑车点云数量测试、行人黑衣点云数量测试、锥筒点云数量测试、轮胎点云云数量测试、数据传输测试、道路测试、低温启动测试、低温工作测试。

(镭神智能可靠性与测试中心团队)

(室外环境上路测试)
-40℃~-25℃各项性能表现良好
在海拉尔经历数天的实际上路测试后,CH128X1的各项性能指标表现良好,最终的实验结果均“通过”。
测试结果证明,即使在低温天气下,CH128X1的电机依旧正常工作并稳定输出数据,最远探测距离可达200m(160m@10)。在测试不同反射率10%、70%、400%下的绝对误差与均方差时,精度均在标准以内。水平视场角为120°(误差≤1°)和垂直视场角25°(误差≤0.5°)
极寒天气下点云数据稳定
值得一提的是,在真实道路环境下,CH128X1对环境(路牌、栏杆、灯杆、树木、车道线等)、车辆(cut in、cut out、对面车辆等)、行人均能精确感知,并且感知点云数据呈现稳定。
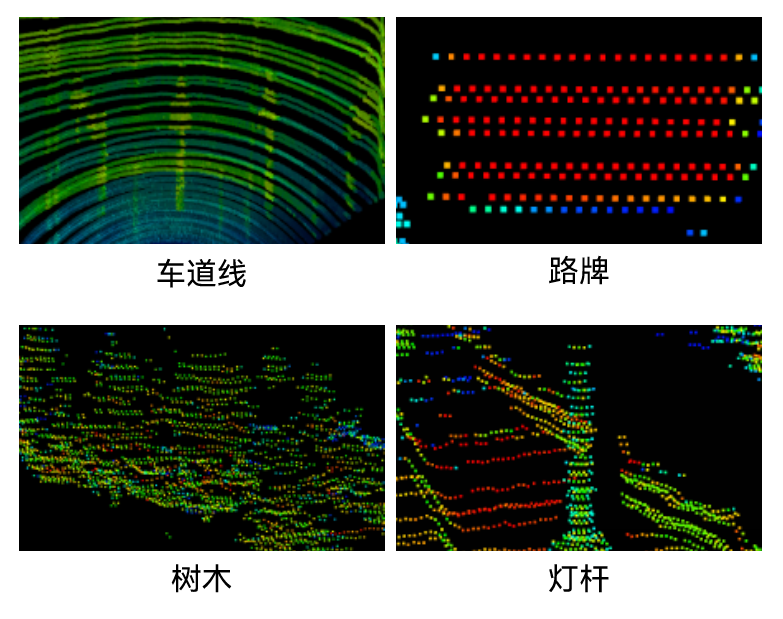
(CH128X1在极寒天气下的实际路侧效果)
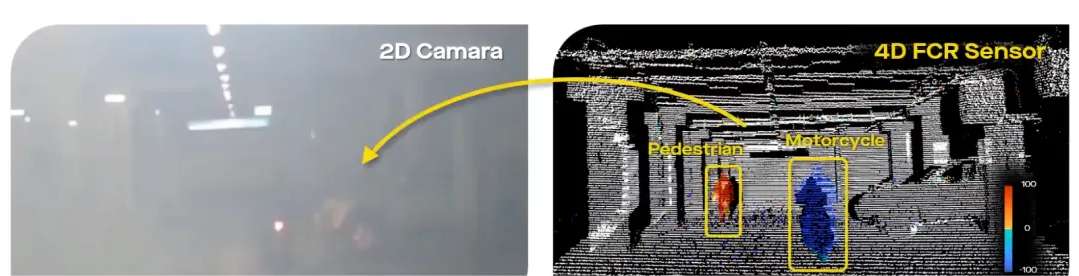
目标识别距离和识别效果良好
同时,考虑到低温雪天对激光雷达对反射率低的目标物的探测效果的影响。
产品测试人员以黑车、行人黑衣、锥筒、轮胎为典型目标,分别在上车激光雷达与目标物距离10至200米的区间内,以20米为等差数列,设置最多13组的测试距离,根据不同目标物选择适宜的测试距离,从近至远,进行目标物的识别效果和识别距离测试。

(测试团队测试现场)
在四组目标测试项目中,结果均与各自的测试标准相符,测试达标。
以上测试结果,显示了镭神智能激光雷达CH128X1在极寒天气下依旧突出的环境感知能力,佐证了CH128X1的环境适应性。而这也将有力助推无人驾驶得以在更多复杂环境场景下安全应用。
-
激光雷达
+关注
关注
968文章
3981浏览量
190029
发布评论请先 登录
相关推荐
一则消息引爆激光雷达行业!特斯拉竟然在自研激光雷达?
激光雷达技术或可助力防御无人机
镭神智能:激光雷达技术引领低空经济变革
镭神智能激光雷达全场景系统解决方案赋能低空经济新时代

激光雷达的维护与故障排查技巧
激光雷达技术的基于深度学习的进步
镭神智能激光雷达低空无人机目标追踪光电系统:筑牢机场低空安防屏障
镭神智能牵头起草的业内首个激光雷达3D SLAM无人叉车团体标准正式发布
禾赛科技独供百度Apollo新一代无人车主激光雷达
九识智能发布新款无人车Z5 2024,搭载禾赛AT128激光雷达
一文看懂激光雷达

激光雷达的探测技术介绍 机载激光雷达发展历程

亮道智能:发布全新一代激光雷达,未来主攻固态激光雷达低价市场
激光雷达LIDAR基本工作原理

关于镭神智能M10系列激光雷达抗环境光强度参数的严正声明





 工商网监
工商网监
评论