 X3派和PC虚拟机之间基于ROS2和wifi的通信
X3派和PC虚拟机之间基于ROS2和wifi的通信
背景介绍
多机通信是ROS的基础能力之一,相比于ROS1,ROS2通过非常简单的配置即可实现多机通信。
对于两个安装了ROS2(或者地平线的TogetherROS)的设备,设备的IP地址在同一网段,并且ROS_DOMAIN_ID相同(如果不设置,默认是0),即可实现设备之间通过ROS2通信。
下面介绍X3派和PC虚拟机都连接无线wifi网络的情况下,通过ROS2实现跨设备通信。
准备工作
X3派
- 已安装Ubuntu 20.0.4系统,安装方法:1. 快速开始 — 旭日X3派用户手册 1.0.0 文档 (horizon.ai)
- 已安装ROS2 Foxy,推荐安装地平线基于ROS2 Foxy深度优化和扩展的TogetherROS,安装速度更快。安装方法:2.2. 通过DEB包安装 — 地平线机器人平台用户手册 1.0 文档 (horizon.ai)
- 已连接wifi,连接方法:2. 系统配置 — 旭日X3派用户手册 1.0.0 文档 (horizon.ai)
PC虚拟机
- PC宿主机为windows,使用VMware workstation 15.5举例说明。
- 虚拟机已安装Ubuntu 20.0.4系统。
- 虚拟机已安装ROS2 Foxy。
操作方法
- PC宿主机断开有线连接,和X3派连接同一wifi。
- 虚拟机网络设置成桥接&复制物理网络连接状态:
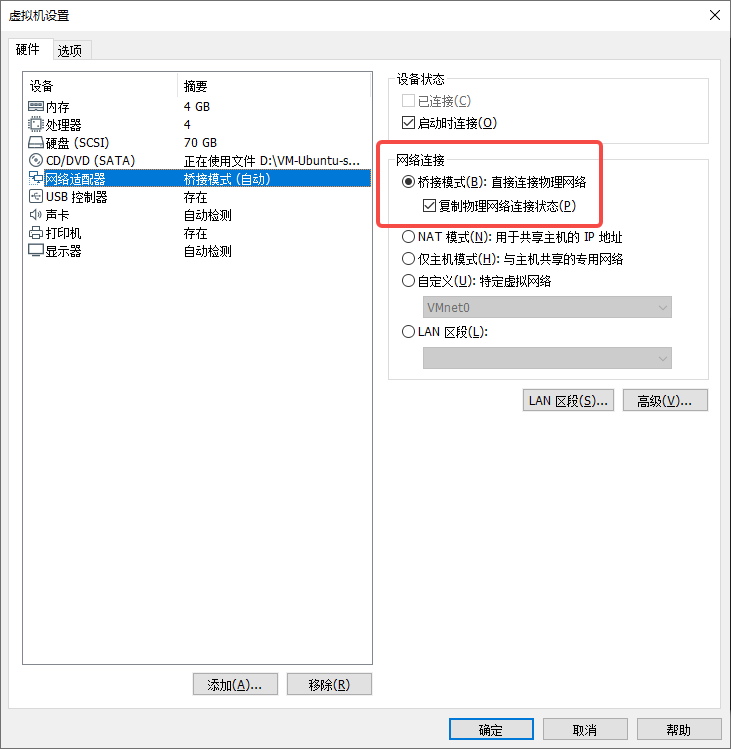
- 启动虚拟机。
结果分析
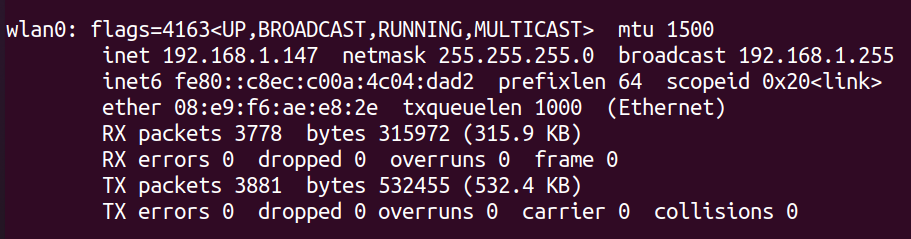
查看X3派的IP地址:
查看PC虚拟机中Ubuntu的IP地址:
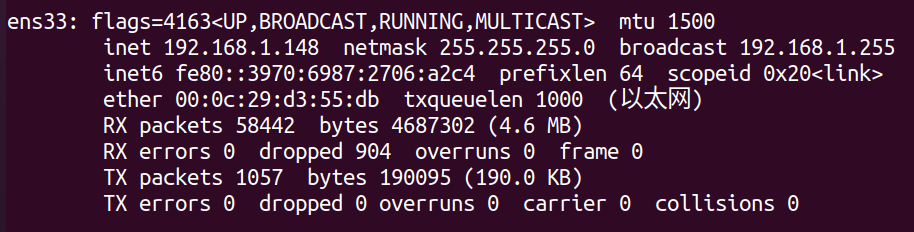
连接同一wifi后,X3派和PC虚拟机中Ubuntu的IP地址相同。开始测试X3派和PC虚拟机之间通过ROS2进行通信。
X3派发布消息:
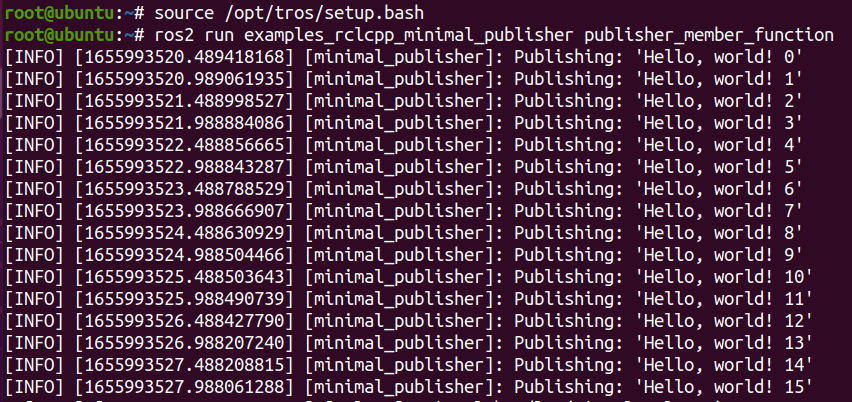
PC端订阅消息:
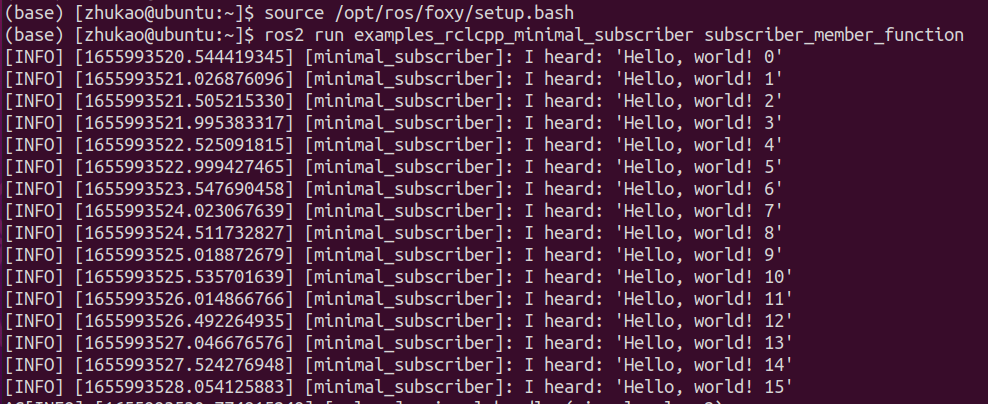
可以看到,PC端的ROS2 Foxy订阅到了X3派TogetherROS发布的消息,说明两个设备在连接同一wifi的情况下,通过ROS2跨设备通信成功。
本文转载自地平线开发者社区
原作者:zhuk
原链接:https://developer.horizon.ai/forumDetail/98129467158916230
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
物联网
+关注
关注
2914文章
45014浏览量
377918 -
人工智能
+关注
关注
1797文章
47867浏览量
240846
发布评论请先 登录
相关推荐
hyper-v虚拟机,为何需要用hyper-v虚拟机?
: 1. 降低成本:通过服务器整合,减少物理服务器数量,从而节省硬件采购、维护和能源消耗成本。 2. 提高资源利用率:在一台物理机上运行多个虚拟机,优化硬件资源利用,提高整体效率。 3. 简化管理:提供集中化的
使用myCobot 280机械臂结合ROS2系统搭建机械分拣站
这篇文章是来自Automatic Addison的开源项目,已获作者授权转载自github。本项目的主要内容是使用myCobot 280机械臂结合ROS2系统搭建机械分拣站。

虚拟化数据恢复—XenServer虚拟机数据恢复案例
Server操作系统虚拟机,该虚拟机有2块虚拟磁盘(系统盘+数据盘),当作网站服务器使用。
服务器虚拟化故障:
XenServer
虚拟机数据恢复—异常断电导致XenServer虚拟机不可用的数据恢复案例
虚拟机数据恢复环境:
某品牌服务器通过同品牌某型号的RAID卡,将4块STAT硬盘为一组RAID10阵列。上层部署XenServer虚拟化平台,虚拟机安装Windows Server系统,每台
虚拟化数据恢复—EXSI虚拟机误还原快照如何恢复数据?
虚拟化技术原理是将硬件虚拟化供不同的虚拟机使用,一台物理机上可以有多台虚拟机。人为误操作或者物理机故障会导致上层

什么是虚拟机?什么是虚拟化?
在日新月异的科技世界中,虚拟化技术如同一座桥梁,连接着现实与数字的鸿沟,为我们打开了全新的计算维度。虚拟机,这一概念,自其诞生以来,就以其独特的魅力和强大的功能,深深地影响了软件开发、系统测试和云计算等多个领域。即使目前你还不了解它的应用,你应该也听过
创建ubuntu虚拟机
英文的习惯。创建ubuntu虚拟机打开VMware软件,点击创建新的虚拟机。进入以下界面:选择自定义,点击“下一步”。选择对应VMware版本的兼容性,版本可在帮助->关于VMware
发表于 08-10 14:15
虚拟机数据恢复—KVM虚拟机被误删除的数据恢复案例
:EXT4
主要数据:MySQL数据库
虚拟机2:备份数据库服务器
虚拟磁盘:系统盘(qcow2)+数据盘(raw)
文件系统:EXT4
主要数据:MySQL数据库
什么是虚拟机?虚拟机真的那么好用吗?
在日新月异的科技世界中,虚拟化技术如同一座桥梁,连接着现实与数字的鸿沟,为我们打开了全新的计算维度。虚拟机,这一概念,自其诞生以来,就以其独特的魅力和强大的功能,深深地影响了软件开发、系统测试和云

服务器数据恢复—KVM虚拟机raw格式磁盘文件数据恢复案例
服务器数据恢复环境:
一台服务器安装Linux操作系统+EXT4文件系统。服务器上运行数台KVM虚拟机,每台虚拟机包含一个qcow2格式的磁盘文件和一个raw格式的磁盘文件。
服务器故障
虚拟化数据恢复—虚拟机误还原快照的数据恢复案例
有一台虚拟机是由物理机迁移到ESXI上面的,迁移完成后为该虚拟机做了一个快照。虚拟机上运行了一个SQL Server数据库,记录了5年左右的数据。
该ESXI上共有二十几台
ZMC900E控制器之ROS2环境安装指南
ZMC900E是致远电子研发的最新一代高性能EtherCAT控制器,支持ROS2系统,兼备强大功能和实时性,为工业应用带来新的可能。本文将详述ROS2特点和安装,助力用户在机器人上的二次开发

虚拟机的ip地址和主机一样吗
地址,用于与其他设备进行通信。下面将详细介绍虚拟机的IP地址和主机的IP地址之间的区别和联系。 IP地址是用于在网络中唯一标识设备的一串数字。在TCP/IP协议栈中,IP地址被用于路由数据包,并将数据从源设备传递到目标设备。每个
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?
请问一下,百度文库资料里面,下图所示的系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?与前面4GB版本的镜像有什么区别?
发表于 03-01 23:06
【鸿蒙】(一)Vmware虚拟机和Ubuntu安装
备注 虚拟机命名、用户名称、路径不能有汉字 名称或者路径有汉字,导致输入失败或者安装失败 2.虚拟机处理器内核总数(处理器数量 X 每个处理器的内核数量)不得超过电脑逻辑处理器总个数






 工商网监
工商网监
评论